基于模糊CMAC的移动机器人轨迹跟踪控制
2015-04-14王耀南
金 娟,王耀南
湖南大学 电气与信息工程学院,长沙 410082
1 引言
近年来对非完整系统的研究得到了国内外学者的普遍关注。作为一类典型的非完整控制系统,移动机器人的镇定和轨迹跟踪问题较为复杂,主要是因为受非完整约束的系统不满足Brockett的光滑镇定条件,不存在连续时不变的反馈控制律使其镇定到某一位置[1]。文献[2-3]采用Lyapunov直接法和积分反演技术对移动机器人的轨迹跟踪问题进行了研究,对满足一定条件的参考模型实现了全局指数跟踪。文献[4]采用基于CMAC的算法实现了跟踪,算法简单但存在抖动。上述方法主要基于非完整移动机器人的运动学模型,要实现完美的轨迹跟踪控制,需要考虑移动机器人的动力学特性。文献[5]针对移动机器人的动力学模型,首先利用力矩控制和反演技术结合,设计了轨迹跟踪的控制律,所得结果具有全局稳定性。文献[6]将鲁棒自适应方法用于移动机器人的力矩控制,设计了全局稳定的轨迹跟踪控制律,但没有对存在未知参数和不确定扰动下的系统进行研究。文献[7]针对存在未知参数和不确定扰动的系统提出了模糊自适应律,但是设计算法复杂。文献[8-10]在极坐标系下采用滑模控制,在存在外界扰动的情况下也取得了良好的跟踪效果。本文从移动机器人的运动学和动力学模型出发,利用模糊CMAC神经网络来逼近系统的非线性和不确定性,同时与速度误差结合起来构成力矩控制器,并用滑模项来补偿不确定性扰动对系统的影响。所设计的控制器结构简单,算法易于实现,对满足一定条件的参考轨迹可以实现全局跟踪,并且对于有界未知扰动具有很强的鲁棒性。Lyapunov稳定性定理证明了其稳定性,仿真结果验证了其有效性。
2 移动机器人模型
图1所示的移动机器人是一个典型的非完整机械系统,它由两个同轴安装的驱动轮和一个辅助前轮组成,两个驱动轮由两个直流电机独立驱动以负责机器人的运动和转向。两轮的半径都为r,轮距为2R,移动机器人的重心位置为C,P为驱动轮连接线的中心,C与P的距离为d。用向量q=[xcycθ]T来表示移动机器人在笛卡尔坐标系中的位置,其中xc,yc表示重心C点在笛卡尔坐标系中的坐标,θ为坐标系{C,XC,YC}与笛卡尔坐标系的夹角。
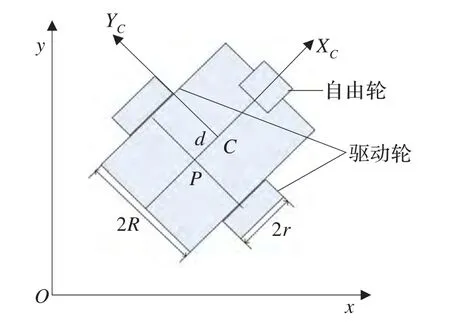
图1 移动机器人示意图
一般而言,具有n维系统状态并受m维约束的非完整移动机器人的动力学方程可以表示为[11]:

式中,M(q)∈Rn×n为正定对称惯性矩阵;Vm(q,q˙)∈Rn×n为向心力和哥氏力矩阵;G(q)∈Rn为重力矩阵,F(q˙)∈Rn为摩擦力,对于在光滑平面运动的移动机器人,G(q)和 F(q˙)都为零;τd∈Rn为有界的未知扰动;τ∈Rr为控制输入向量;B(q)∈Rn×r为输入变换矩阵;λ∈Rm为约束力;A(q)∈Rn×m为约束矩阵。
非完整约束可以表示为:

选择一个n-m维的满秩矩阵S(q)为 AT(q)零空间的一组基,即有:

从式(2)和(3)中可以得到一个辅助的速度控制输入量 v(t)∈Rn-m,有:

对于图1所示的移动机器人,非完整约束使其只能在与驱动轮轮轴垂直的方向上运动,即必须满足纯滚动和无滑动的条件:

因此,式(1)中的约束矩阵可以表示成:

进而S(q)可表示成:

那么,式(4)所表示的运动学方程为:

其中,v(t)=[vω]T,v和ω分别表示移动机器人的线速度和角速度。
由Euler-Lagrange方程可得图1所示移动机器人模型的动力学参数[8]:

其中,m表示移动机器人的质量,I表示转动惯量,τr和τl分别表示左右轮的力矩。
将式(1)左乘ST(q)并化简可得:

由文献[11]可知式(10)的参数矩阵有如下性质:
性质1对于任意的q,惯性矩阵(q)是正定的。
性质2矩阵函数是斜对称的,即对于任意向量α,有:

在此假设移动机器人的有界未知扰动满足||-τd||≤dB。根据(9)可得(10)的参数矩阵为:

3 模糊CMAC
小脑神经关节控制器(CMAC)[12]是一种基于神经生物学的、简单快速的神经网络,能够学习任意多维非线性映射。与BP神经网络一类的全局逼近方法相比,CMAC有很多优点,它具有局部逼近能力、连续输入输出能力和一定的泛化能力,结构简单,学习速度快,特别适合于实时控制。但是传统的CMAC也有自身的不足,由于输入状态与联想强度之间的关系只是简单的“激活”和“不激活”的关系,不符合人脑认识事物的模糊性和连续性,导致CMAC的自适应性较差。文献[13-15]将模糊理论引入CMAC,对CMAC的输入空间划分方式和联想单元激活方式进行模糊化处理,使得输入空间划分方式以及联想强度的激活活性可在线调整,从而提高了控制器的自学习能力。其仿真结果表明模糊CMAC具有更好的自适应性和鲁棒性。本文不再对模糊CMAC的优越性进行仿真比较说明,而是直接将其用于对移动机器人动力学模型不确定参数的逼近。
模糊CMAC的具体模型如图2所示。根据后文的需要,在此以逼近4输入2输出的函数为例进行说明。
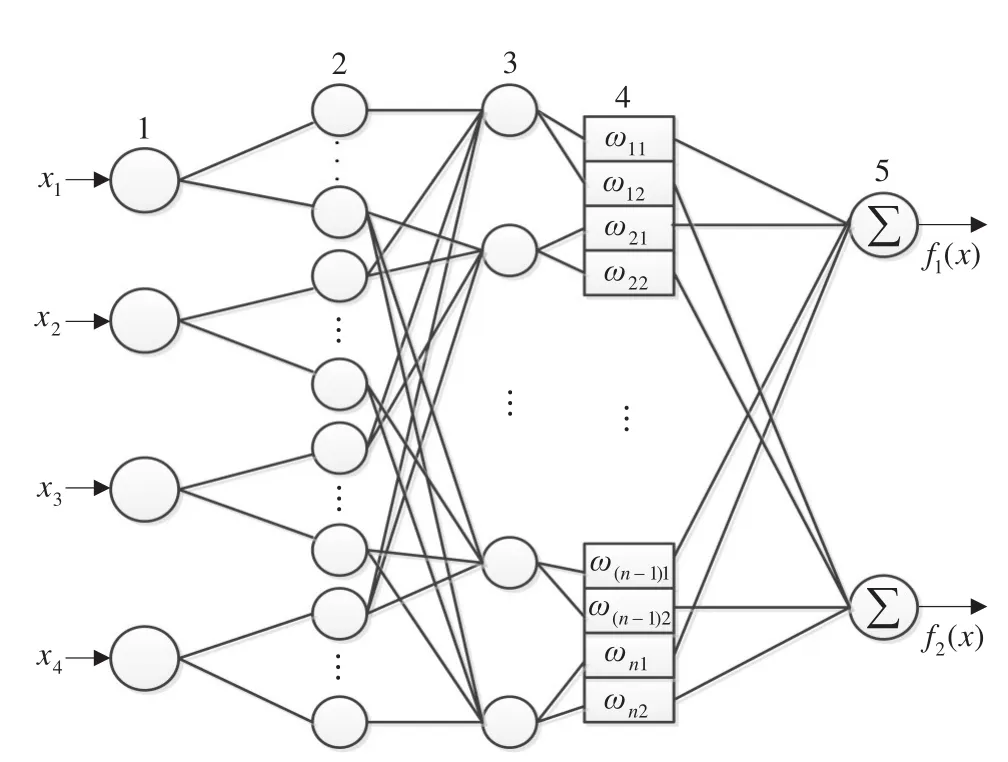
图2 模糊CMAC结构图
第一层为输入层:

第二层为模糊化层,本文采用高斯基隶属函数对输入进行模糊化处理。
假设所有输入xi是连续有界的,在每个输入xi的论域上定义n个“块”Bij,输入xi对“块”Bij的隶属关系为:
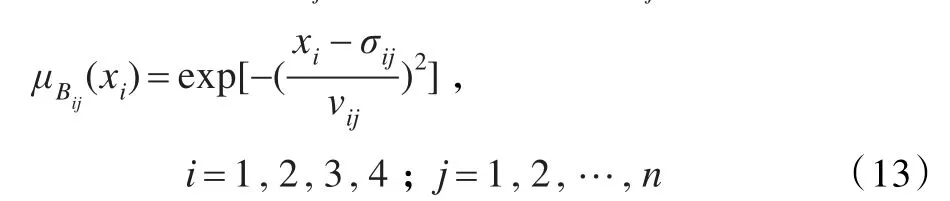
式中,σij表示函数的中心值,vij表示函数的宽度。则第二层的输入与输出的关系为:

第三层为模糊相连层,用于得出对联想单元的激活强度。所有输入论域对应的块组成n4个超立方体Hq,每个超立方体与一个联想单元对应,每个联想单元则存储相应的联想强度。激活强度相当于xi对于各个块的隶属度的“与”,本文用乘法实现“与”操作,有:

第四层以第三层求出的激活强度激活联想单元的联想强度,各个联想单元输入输出关系为:

其中ωqi表示各个联想单元的联想强度。
第五层为输出层,对联想单元进行求和以恢复系统信息:

通过将ωqi写成矩阵的形式,有:

4 控制器设计和稳定性分析
4.1 控制器设计
下面从移动机器人的运动学和动力学模型出发,设计轨迹跟踪控制器。控制系统的结构如图3所示。
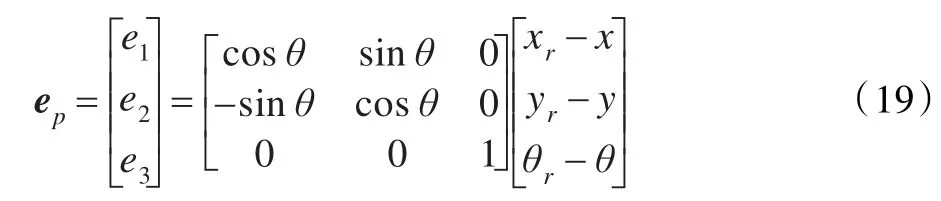
用qr=[xryrθr]T表示参考轨迹,q=[xy θ]T表示移动机器人的实际运动轨迹,则在局部坐标系下的跟踪误差可以表示为ep=T(qr-q),即
那么,误差变化率为:

文献[2]给出在给定速度vr>0的前提下,跟踪运动学模型(8)的速度控制输入为:

其中,k1,k2,k3>0 为设计参数。
对于参考速度vc,定义速度跟踪误差为ec,令ec=[e3,e4]T=vc-v,对该式求导并结合(10),可得速度跟踪误差下的动力学方程:
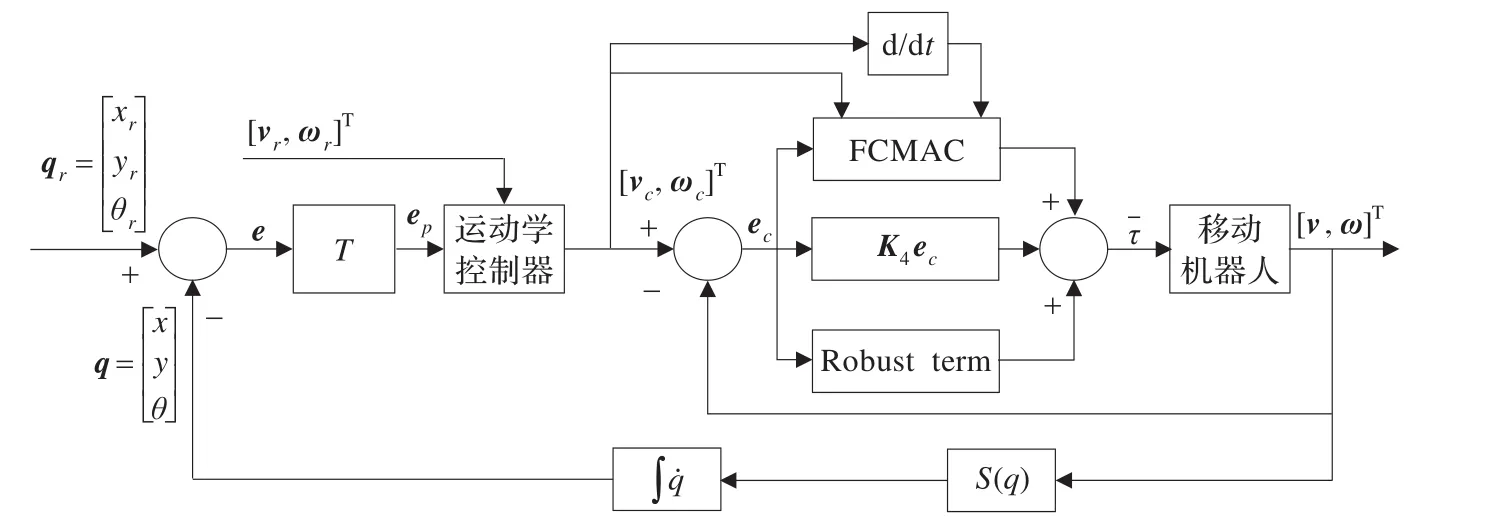
图3 基于模糊CMAC的控制结构图


那么通过计算力矩法来进行跟踪控制的合适的控制输入可选为:


K4ec为负反馈项,且K4为正定的对角增益矩阵;γ用于补偿系统中未建模的不确定性扰动。
将此控制用于式(22),则速度跟踪误差动力学模型变为:

其中:


其中,Kd为正定对角矩阵,其值依赖于扰动的大小,需满足 min(diag(Kd))≥dB。
4.2 稳定性分析和权值更新算法
选取Lyapunov函数如下:

其中
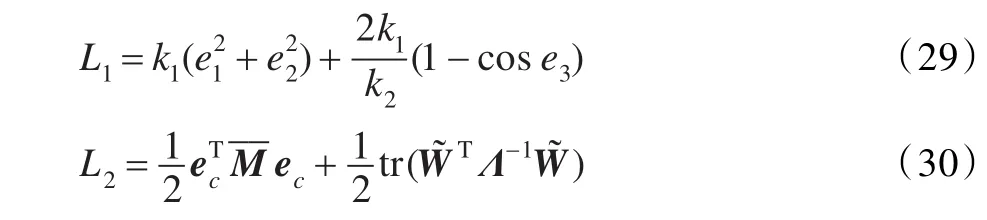
显然,L≥0,只有在ep,ec,都为零时,有L=0。
对式(29)求导,有:

将式(20)、(21)代入上式中,得:

因为给定线速度vr>0,所以L˙≤0。
对式(30)求导,有:

代入速度误差模型式(26)得:

其中K4min、Kdmin分别为 K4和Kd的最小奇异值。

进而可简化为:

由于 min(diag(Kd))≥dB,有≤0 ,定理得证。
式(34)为模糊CMAC的权值更新学习算法,该算法简单易于实现。
5 仿真结果及分析
为了验证所设计方法的有效性,本文以图1所示的两轮差分驱动的非完整移动机器人为控制对象进行matlab仿真实验,其中,m=10 kg,I=5 kg·m2,2R=0.4 m ,r=0.05 m ,d=0。
设参考轨迹为x2+y2=r2,r=2,其中参考线速度为vr=0.2 m/s,参考角速度为ωr=0.1 rad/s。参考机器人和实际机器人的初始位置分别为qr(0)=[2 0pi/2]T和q(0)=[1 . 7 0pi/2]T。控制器的参数选为k1=1,k2=2,k3=2,K4=15I2,Λ=0.7I2,Ik为k×k的单位矩阵。仿真时设=[2cos(5t);2sin(5t)],并选取正定矩阵 Kd为[2.5,0;0,2.5]。
仿真结果如图4和图5所示,图4为系统没有加扰动的跟踪情况,图5为加扰动后的跟踪情况。在两组图中,图(a)实线所示为移动机器人的参考轨迹曲线,虚线为实际跟踪曲线,图(b)xe所示为x轴方向的跟踪误差,ye所示为y轴方向的跟踪误差,thetae表示方向误差。由仿真结果可知,移动机器人能实现对给定曲线快速且平稳的跟踪,并且位姿误差也能快速收敛到零。通过对比有无扰动的情形可知,设计的控制器对有界不确定性扰动具有很强的鲁棒性。
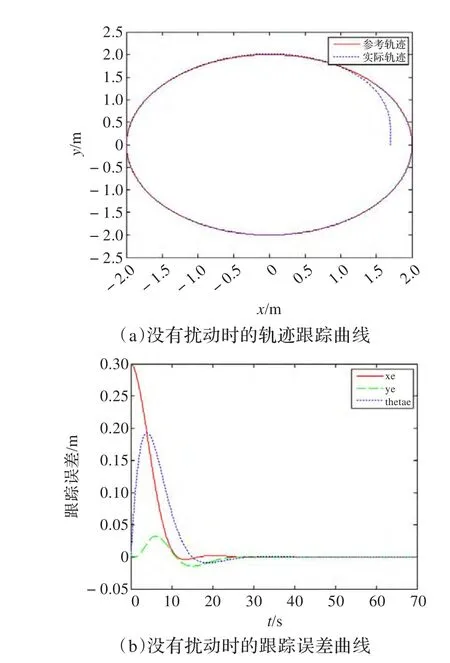
图4 没有扰动时的轨迹跟踪曲线与跟踪误差曲线

图5 有扰动时的轨迹跟踪曲线与跟踪误差曲线
6 结论
本文从移动机器人的运动学和动力学模型出发,提出了基于模糊CMAC的跟踪控制器,该控制器能够很好的消除移动机器人的动态不确定性和扰动对系统的影响,Lyapunov稳定性定理保证了系统的稳定性和跟踪误差的渐近收敛。仿真结果表明了该控制器的有效性和鲁棒性。
[1]Komannovsky H,Macclamroch N H.Developments in nonholonomic control systems[J].IEEE Control systems magazine,1995,15(6):20-36.
[2]Jiang Z P,Nijmeijer H.Tracking control of mobile robots:A case study in backstepping[J].Automatica,1997,33(7):1393-1399.
[3]吴卫国,陈辉堂,王月娟.移动机器人的全局轨迹跟踪控制[J].自动化学报,2001,27(3):326-331.
[4]Li Xin,Chen Wei,Chen Mei.Application of CMAC-based algorithm of critics&strategists on robot tracking control[C]//Proceedings of the International Conference on Networking and Digital Society,2010:298-302.
[5]Fierro R,Lewis F L.Control of a nonholonomic mobile robot:backstepping kinematicsinto dynamics[J].Journal of Robotic Systems,1997,14(3):149-163.
[6]Chang Y,Chen B.Adaptive tracking control design of nonholonomic mechanical systems[C]//Proceeding of the 35th Conference on Decision and Control,1996:4739-4744.
[7]Tamoghna D,Indra N K.Design and implementation of adaptive fuzzy logic-based controller for wheeled mobile robots[J].IEEE Transactions on Control Systems Technology,2006,14(3):501-510.
[8]Yang J,Kim J.Sliding mode control for trajectory tracking of nonholonomic wheeled mobile robots[J].IEEE Transactions on Robotics and Automation,1999,15(3):578-587.
[9]Chwa D.Sliding-mode tracking control of nonholonomic wheeled mobile robots in polar coordinates[J].IEEE Transactions on Control Systems Technology,2004,12(4):637-643.
[10]Park B S,Yoo S J.Adaptive neural sliding mode control of nonholonomicwheeledmobilerobotswithmodel uncertainty[J].IEEE Transactions on Control Systems Technology,2009,17(1):207-214.
[11]Fierro R,Lewis F L.Control of a nonholonomic mobile robot using neural network[J].IEEE Transactions on Neural Networks,1998,9(4):589-600.
[12]王耀南.机器人智能控制工程[M].北京:科学出版社,2004:83-109.
[13]王源,胡寿松.基于自组织模糊CMAC网络的非线性系统鲁棒自适应跟踪控制[J].自动化学报,2002,28(6):984-989.
[14]孙炜,王耀南.模糊CMAC及其在机器人轨迹跟踪控制中的应用[J].控制理论与应用,2006,23(1):38-42.
[15]Shieh H L,Bao Chin Y.A robust fuzzy CMAC for function approximation[C]//Proceeding of the9th International Conference on Machine Learning and Cybernetics,Qingdao,China,11-14 July,2010:2962-2966.