无信号公路平交口支路上游功能区减速驾驶行为研究*
2015-04-13张国强亓玉礼
郑 元 张国强▲ 亓玉礼
(1.东南大学城市智能交通江苏省重点实验室 南京210096;2.东南大学现代城市交通技术江苏高校协同创新中心 南京210096;3.上海市政工程设计研究总院集团第七设计院有限公司 山东青岛266001)
0 引 言
随着我国经济迅速发展,人民生活水平显著提高和机动车拥有量逐年攀升,无信号交叉口成为交通事故频繁发生地段,据统计交叉口处发生的交通事故占事故总数的30%~35%[1],由于无信号控制交叉口没有信号灯和缺乏明确路权分配,驾驶员必须凭借自身判断来决定是否通过,容易导致交通秩序混乱,发生交通事故。国内外大量的数据表明,无信号控制公路平面交叉口是公路交通系统极为薄弱的环节,也是恶性交通事故的多发地点之一[2]。道路交通系统是由人、车、路、环境四部分共同组成,其中人(尤其是驾驶员)是其中惟一的自主性变量。驾驶员不仅是道路交通系统的信息处理者和事件决策者,也是道路交通系统的调节者和控制者。美国的Treat和英国的Sabey研究得出人的因素是道路事故发生的主要原因,并且与人有关的交通事故占总事故的93%~94%[3]。
驾驶员因素是交通事故的主要影响因素,而驾驶员主要表现形式就是驾驶行为[4],驾驶行为是驾驶员针对不同道路交通系统表现出来特有的外在活动。对于交叉口驾驶行为的研究主要集中在不良驾驶行为统计分析[5]、驾驶行为理论[6]、交叉口内部驾驶行为与冲突的关系模型研究[7],或是对于通过交叉口驾驶决策行为而进行探讨[8],但是忽略了驶入交叉口前支路上游功能区内[3]减速驾驶行为探究。
Wang等[9]对停车控制交叉口车辆的减速行为按照不同的初始速度进行分类,分析了不同初始速度下车辆减速度、减速时间、减速距离的变化。随着车辆初速度增大,车辆的开始阶段减速度、减速时间、减速距离均会逐渐变大。马天宇[10]通过比较交叉口停车线处及在不同通行剩余时间内(绿灯变黄灯前3s及黄灯期间)的车辆速度变化,分析倒计时信号显示屏对驾驶员行为的影响,结果表明车辆在黄灯时间内停车最多,但在绿灯剩余时间3s时,车辆多以匀速和减速行驶为主。孙正良等[11]通过对闯黄灯车辆行驶速度和初始位置进行对比来研究驾驶员在交叉口黄灯期间驾驶行为决策过程。结果表明信号交叉口采用绿闪和倒计时提示对驾驶行为选择影响较大,其闯黄灯行为发生率明显低于黄灯提示方式,但倒计时提示会诱发机动车驾驶员加速通过交叉口并增加安全隐患。Chu Cong Minh等[12]研究摩托车驾驶员在交叉口的减速行为时提出:当车辆到达交叉口时的减速距离大于一个临界值时,视为“自由减速”,否则视为“约束减速”。施晓芬[13]对完整的交叉口行驶过程划分为驶入交叉口前和通过交叉口2个部分,通过GPS记录不同情况下车辆驶入交叉口前和通过交叉口过程中速度数值并分析其速度变化机理。
对于驾驶行为影响因素,大多数研究主要集中在内部因素和外部因素方面[14-15],直接影响驾驶行为内部因素包括心理和生理因素,而其他学者也通过车辆、道路、环境等外部因素对驾驶行为进行分析。祝站东等[16]发现天气条件对行车速度影响显著,晴天条件下驾车最为舒适;能见度对行车速度影响显著,一定范围内能见度每降低50m,行车速度大约会下降15%。蔡娜[17]提到了车辆类型跟交通事故数的关系,因此车辆类型对驾驶员的速度选择可能会产生影响。
目前国内对无信号交叉口支路上游功能区减速驾驶行为的许多研究还只停留在定性分析的层面,或是减速行为对进入交叉口的辅助研究,缺少定量的分析和研究,并且未对其相关外部影响因素进行详细探讨和建立相应驾驶行为模型。所以基于选取速度和加速度作为支路减速驾驶行为的特征变量数值,探讨驾驶员的速度特性和减速度特性。并且从驾驶行为影响因素中筛选出适合外部影响因素,从而建立减速行为模型,对减速驾驶行为进行定量分析速度和减速度与各影响因素之间的关系,探究减速驾驶行为发生机理,为后续的研究提供理论基础,其在改善交叉口的安全状况、提高通行能力方面有重要意义。
1 数据采集
研究数据采集以视频拍摄和现场观测为主。选取调查地点时应遵循以下原则:①公路平交口而非城市道路平交口;②平交口非机动车和行人数量应尽量少,避免其对驾驶员的行为产生干扰;③平交口交通量应适中,能满足研究要求;④平交口附近应有高耸建筑物便于相机俯视拍摄。
按照上述原则在南京市溧水区选取省道S341与金龙西路相交而成的典型无信号控制公路平交口,主路双向4车道,次路双向4车道,其平交口渠化及拍摄位置示意图见图1。所选取平交口为低等级公路与干线公路相交产生的T形全无控制平交口;平交口在城市郊区,所处地形为平原;平交口交通量适中,都能够满足研究要求。调查时间选取早高峰和晚高峰时段。

图1 平交口渠化及拍摄位置示意图Fig.1 The diagram of channelization design of intersection and camera location
1.1 数据采集方法
2013年11月对省道S341与金龙西路平面交叉口进行驾驶员减速行为数据采集,其中一台摄像机为远景拍摄,主要获取无信号控制平交口上游功能区驾驶员减速行为情况,另一台摄像机进行近景拍摄作为辅助拍摄,见图1。
在视频拍摄的同时,利用雷达测速仪对即将进入支路平交口上游功能区的车辆进行测速,作为车辆的路段速度。在记录速度的同时,也记录了车辆的基本特性(颜色、车型、品牌等)以便在视频中能够确认每辆车的路段速度。
1.2 视频数据读取
以每个驾驶员的驾驶行为作为研究对象,驾驶行为通过车辆运行状态体现出来。因此每辆机动车都作为单独研究对象进行记录。需要采集的支路车辆的基本信息、速度、减速度及其影响因素进行数据获取,见表1,驾驶行为内部影响因素在中并未体现,由于其采集较为复杂。
对于车辆在上游功能区内速度采集,通过车辆经过区段内时间和距离的计算获得。参考《公路平面交叉口交通安全设计理论与方法》中各等级公路设计速度分别对应的平交口上游功能区长度建议值,设计速度为40km/h的金龙西路上游功能区内感知反应行驶距离可取25m,减速行驶距离可取25m,由于金龙西路交通量不大,一般不会形成排队现象,排队长度可取0m。因此,省道S341与金龙西路平交口上游功能区可取50m,区段1~4的距离及划分见图2。采用会声会影软件读取数据来确保测量精度,该软件能够将时间精确到帧(0.04s)。

表1 数据采集Tab.1 Data collection

图2 支路上游功能区区段划分示意图Fig.2 The diagram of divided section on upstream function area of branch
视频数据读取完毕对数据筛选后进行特性分析及建模,筛选原则如下:①剔除不符合常理的数据,如负值;②剔除特殊情况下产生的数据,如受到非机动车或行人干扰、事故发生时的数据;③剔除奇异数据,如平交口车辆速度过大的数据。
2 减速行为分析
减速行为是指驾驶员通过调整车速变化来避免事故发生或为了顺利通过平交口采取一定措施的行为。针对无信号控制公路平交口上游功能区内减速变化行为进行分析。
2.1 速度特性分析
根据视频车辆在4个区段内所用的时间分别为tA1,tA2,tA3,tA4,4个区段的长度分别为SA1,SA2,SA3,SA4。则可求得车辆在4个区段内的平均速度,分别记为VA1,VA2,VA3,VA4,并把它们近似视为车辆在区段行驶时间中点的车速。雷达测速仪所获取的VA0为车辆路段速度,可作为车辆刚驶入上游功能区内的速度,视为初速度;VA4为车辆停车线附近的速度,因此车速靠近停车线附近,可视为停车线速度,全部车辆速度分布折线见图3。

图3 速度分布折线图Fig.3 The plot of speed distribution
由图可知,初速度VA0较为离散,每类速度的最大最小值从VA0~VA1均呈现逐步下降的趋势。另外,停车线速度VA4没有为零的车辆,基本都分布在10~20km/h之间,这说明车辆在停车线附近均不停车,符合视频观察发现的实际情况,大多数车辆不会在停车线停车等待后通过,而是选择越过停车线在平交口物理区内等待。
初速度VA0的平均值最大,为35.81km/h;其标准差也最大,为7.144;停车线速度VA4的平均值最小,为1 7.7 4km/h;其标准差也最小,为4.144。每类速度分布越来越离散,说明驾驶员在驶入平交口前,距离平交口越远,其速度越离散;距离平交口越近,其速度越集中,因此驾驶员在驶入平交口时车速趋于一致性。
2.2 减速行为车速的影响因素分析
视频数据读取时将车辆类型划分为小型车、中型车和大型车,该分类主要考虑了车辆尺寸对车速的影响。通过对视频的分析及对参考文献的阅读,车辆左转与右转由于在转向过程中会产生不同的冲突,其操作复杂性也有所不同,所以车辆左右转情况对驾驶员速度选择可能会产生影响。实地观测平交口上游功能区内驾驶速度一般较少会选择停车,而不停车则驾驶员速度相对较大。由于早晚高峰时期驾驶员出行目的有所不同,另外拍摄视频时间为冬季,晚高峰时期光线已经非常昏暗。因此,早晚高峰时期的数据可以进行对比以探讨早晚高峰对驾驶员速度选择的影响。采用了SPSS统计软件进行方差或是相关性分析确定以下因素对驾驶速度是否产生了显著影响,其结果见表2。
1)结果表明在显著性水平为0.05的条件下,不同车型之间对5个速度没有显著性差异,所以车型对无信号控制公路平交口上游功能区内车速无显著性影响。
2)记左转取值为1,右转取值为0,不同转向对5个速度均有显著性影响,表明不同转向对无信号控制公路平交口上游功能区内车速有显著性影响。
3)记早高峰时期值为1,晚高峰时期值为0。早晚高峰对前4个速度影响不显著,而对停车线速度VA4影响显著。
4)车辆在停车线附近停车取值为0,不停车取值1。停车与否对前4个速度影响不显著,而对停车线速度VA4影响显著。由于停车线速度VA4与车辆的停车点距离最近,所以停车与否对停车线速度VA4具有显著性影响。
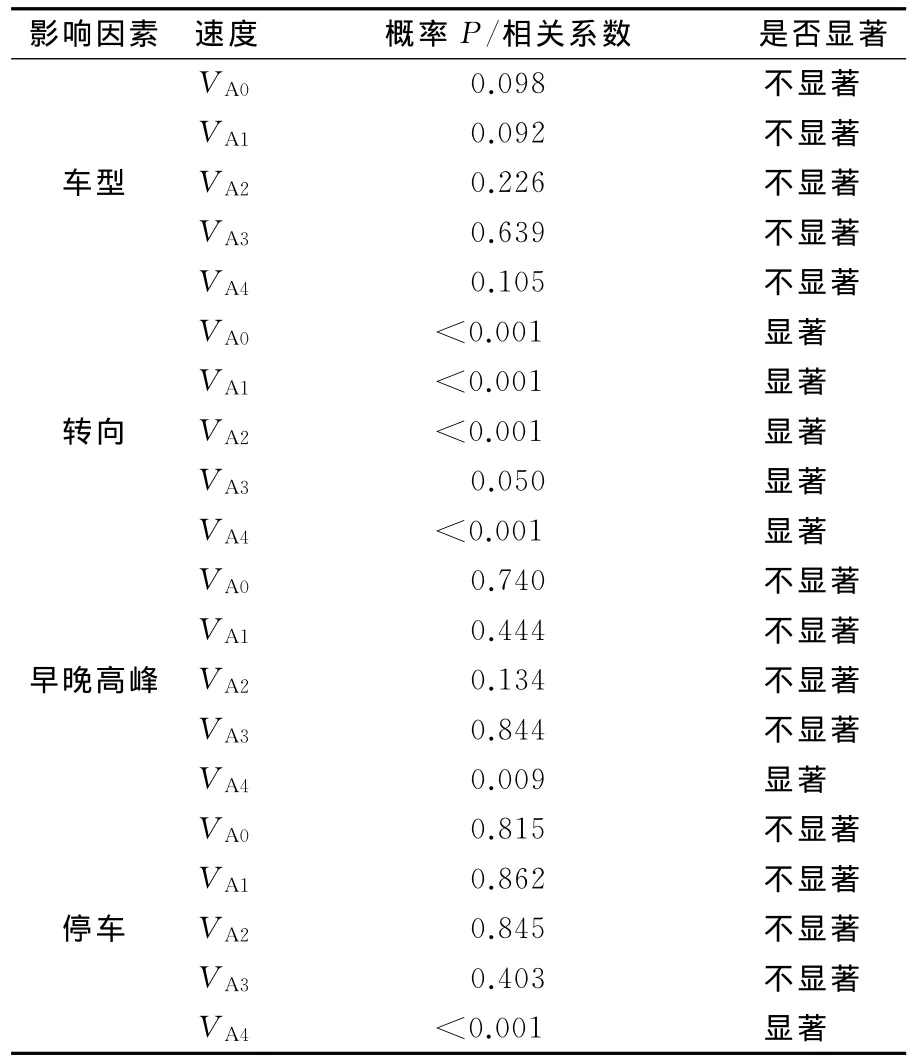
表2 因素对速度的影响分析结果Tab.2 Analysis result of influence of factor on speed
2.2.1 车型对速度的影响
采用控制变量法消除其他因素对车速的干扰,所以选择白天视频中113组左转不停车车辆数据并求其平均速度和平均减速时间,见图4。由图4可见,不同车型车辆速度均相差不大,在时间轴上均呈现明显的下降趋势。
小型车的平均速度最大,中型车平均速度其次,大型车平均速度最小。这是由大型车基本特性决定的,大型车在加减速、爬坡、速度控制方面均不如小型车可操作性好。因此,大型车在平交口上游功能区内要以比小型车或中型车更小的速度来行驶。
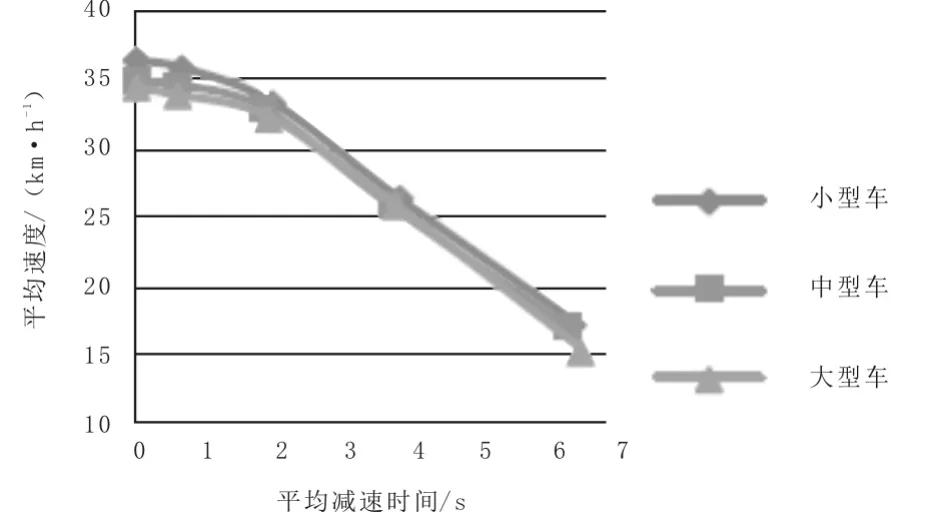
图4 不同车型的速度对比图Fig.4 The comparison plot of speed from different vehicle model
2.2.2 转向对速度的影响
根据白天视频中145组选择不停车小型车辆数据求得其平均速度和平均减速时间,见图5。由图5可见,车辆左右转的速度平均值相差较大,并且驾驶员右转普遍采用较大速度通过平交口上游功能区,而左转的平均速度总是比右转的平均速度低。
由于车辆从次路左转汇入主路过程中最多会产生4个冲突点,包括1个分流冲突点、1个合流冲突点、2个交叉冲突点;而对于车辆从次路右转汇入主路,包括1个分流冲突点和1个合流冲突点。车辆左转可能会遇到的冲突点更多,需要驾驶员控制车辆在平交口上游功能区的车速,所以车辆左转的平均速度比右转的平均速度低。
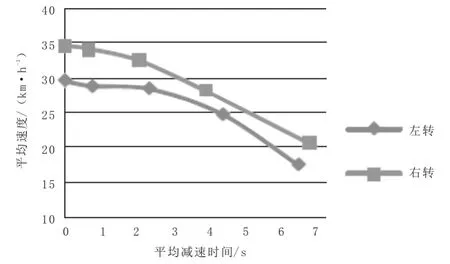
图5 车辆左右转速度对比图Fig.5 The comparison plot of speed from different vehicle′s steering
2.2.3 早晚高峰对速度的影响
根据视频119组左转不停车小型车辆数据求得其平均速度和平均减速时间,见图6。由图6可见,车辆在平交口上游功能区行驶时前4个速度差异不大,但对于停车线速度VA4早晚高峰具有较大的差异性。
因为在停车线附近,驾驶员需要进行判断主路车流状况,选择减速、停车或直接汇入主路,并且在晚高峰期间光线昏暗,驾驶员普遍选择的速度会较小。同时,驾驶员在晚高峰平交口上游功能区内所耗用的时间也较早高峰有所增加。
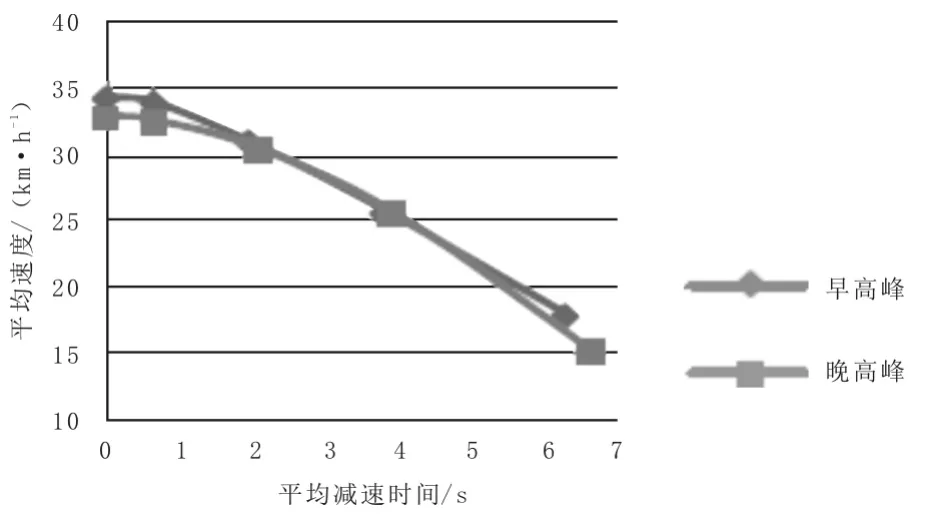
图6 早晚高峰速度对比图Fig.6 The comparison plot of speed at morning and evening peak
2.2.4 停车对速度的影响
根据视频中124组早高峰左转小型车数据求得其平均速度和平均减速时间,见图7。由图7可见,车辆在平交口上游功能区行驶时前4个速度差异不大,但对于停车与不停车2个类型的停车线速度VA4有较大的差异性。另外,选择停车的车辆普遍之前的行驶速度较小。
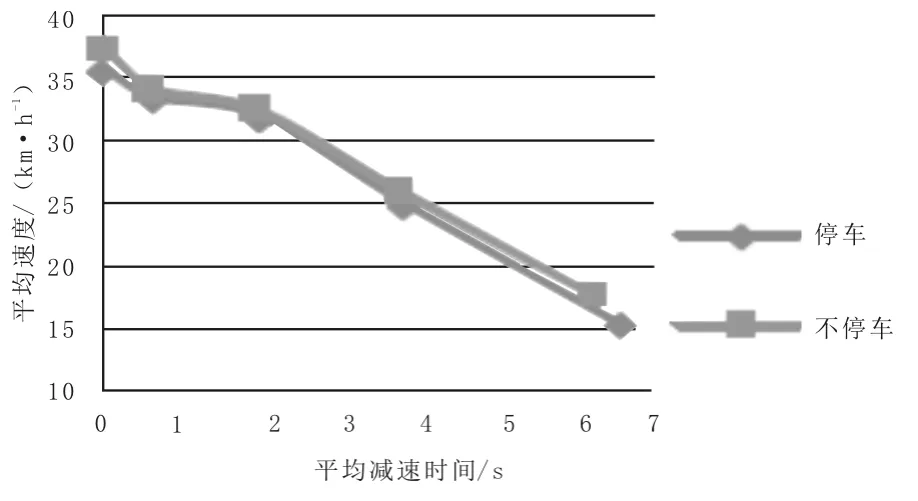
图7 车辆停车与否的速度对比图Fig.7 The comparison plot of speed from vehicle weather stopping or not
通过以上分析可知,不同车型对平交口上游功能区驾驶员的速度选择无显著性影响;车辆左右转向对平交口上游功能区驾驶员的速度选择有显著性影响;而早晚高峰和停车与否仅对停车线速度VA4影响显著,对其余的4个速度影响不显著。
2.3 减速度特性分析
在车速和时间间隔已知情况下,可以计算VA1,VA2,VA3,VA44个速度之间的平均减速度。可将平交口上游功能区划分为3个减速区,分别命名为减速区1、减速区2、减速区3,每个减速区跨越2个相邻的不同区段,3个减速区内的减速度分别记为AA1,AA2,AA3,见图8。中减速度均取正值,其值越大说明单位时间内速度变化越大,减速越剧烈。
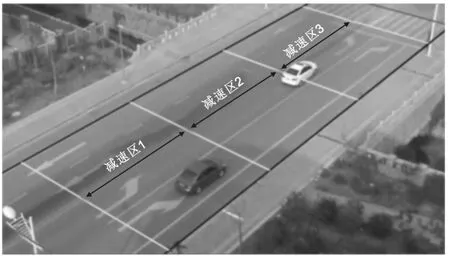
图8 支路上游功能区内减速区划分示意图Fig.8 The diagram of divided deceleration section on upstream function area of branch
2.4 减速度影响因素的分析
与对平交口上游功能区的速度特性分析类似影响因素对速度的影响外,Wang等[9]指出初速度对减速度具有显著的影响。采用SPSS统计分析软件进行单因素方差分析或相关性分析。结果如下。
1)结果表明在显著性水平为0.05的条件下,不同车型对减速度AA1和AA2的影响并没有显著性差异,对减速度AA3具有显著性影响。
2)在显著性水平为0.05的条件下,车辆左右转向对3个减速度具有显著性影响。
3)在显著性水平为0.05的条件下,早晚高峰对减速度AA1和AA3无显著性影响,对减速度AA2具有显著性影响。
4)在显著性水平为0.05的条件下,停车与否对减速度AA1和AA2没有显著性影响,对减速度AA3停车与否具有显著性影响。
5)不同初速度的车辆的减速度会有所差异,但3个减速度与初速度均具有较强的正相关性,即初速度越大的车辆采取的减速度也越大。
2.4.1 车型对减速度的影响
同样采用控制变量法选取113组数据进行不同车型下平均减速度对比,见图9。由图9可见,不同车型情况下车辆平均减速度均相差不大,但不同减速区的减速度具有较大差异。减速区1平均减速度最小,减速区3次之,减速区2平均减速度最大。
由于减速区1内受平交口视距影响,驾驶员看不到主路车流状况,因而车辆减速度较小;而减速区2驾驶员能够观察主路车流的状况,采取减速措施导致该区域内减速度较大;在行驶至减速区3时,驾驶员可以较好控制车速,减速度又有所下降。
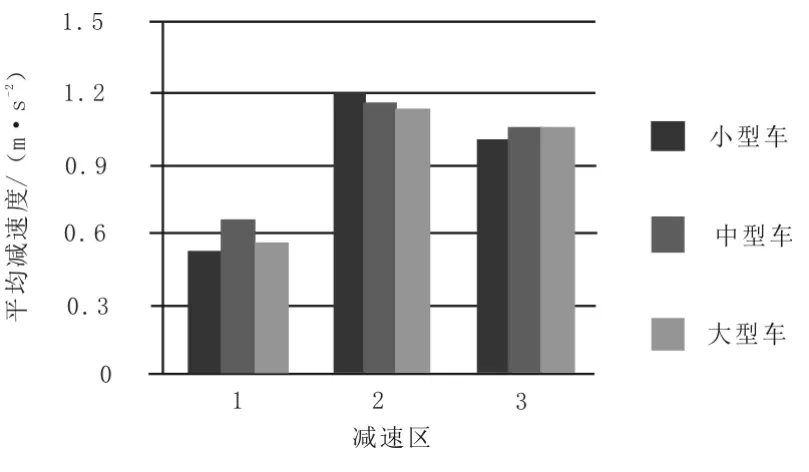
图9 不同车型的减速度对比图Fig.9 The comparison plot of deceleration from different vehicle model
2.4.2 转向对减速度的影响
转向对减速度的影响,见图10。由图10可见,车辆在每个减速区域进行左右转向的平均减速度相差较大,驾驶员右转相比左转普遍采用较小减速度数值通过平交口上游功能区。
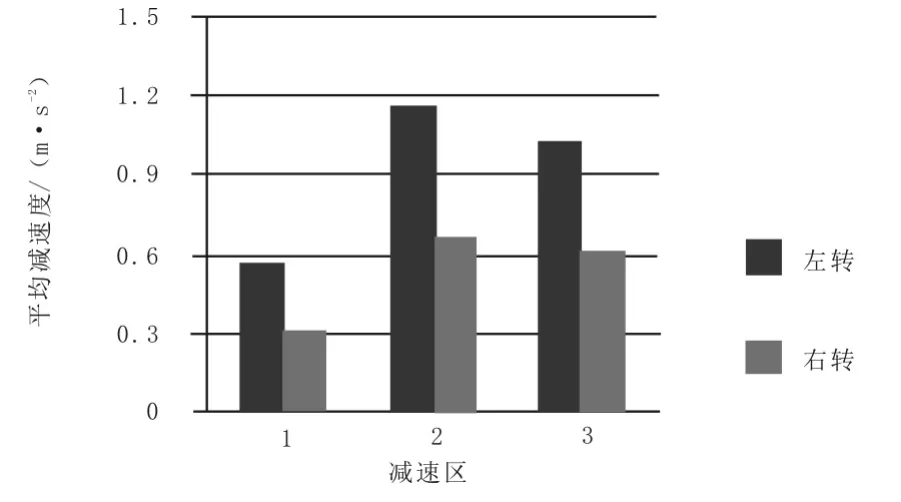
图10 车辆左右转向的减速度对比图Fig.10 The comparison plot of deceleration from different vehicle′s steering
由于左转平均速度总是比右转平均速度低,在路段速度相差不大的情况下,驾驶员左转需要采取相对较大减速度来控制车速,才能保证车辆顺利左转,所以左转平均减速度比右转平均减速度大。
2.4.3 早晚高峰对减速度的影响
早晚高峰对减速度的影响,见图11。由图11可见,早高峰期间减速度AA2最大,减速度AA1最小;晚高峰时期,减速度AA3最大,减速度AA1最小。这是由于早高峰时期光线较好,车辆到达减速区2时观察到主路车流情况,驾驶员以较大减速度行驶;而在晚高峰时期光线较暗,车辆在到达减速区3时,驾驶员才受到主路车流的影响,因此晚高峰时期的减速度AA3最大。
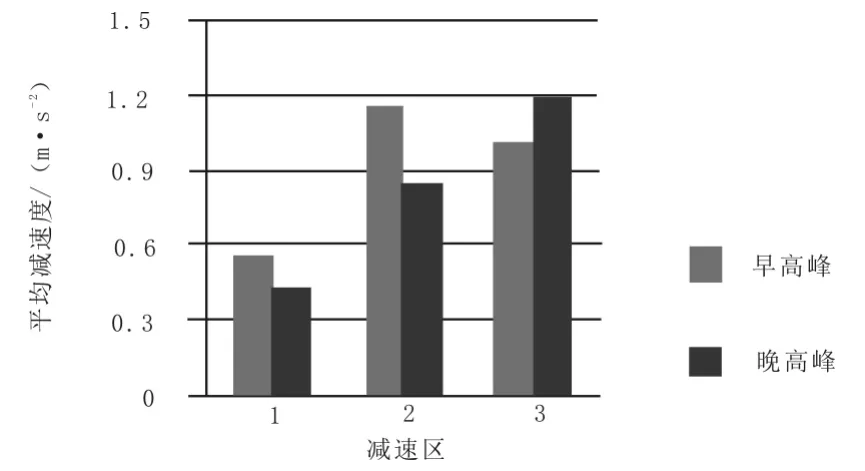
图11 早晚高峰的平均减速度对比图Fig.11 The comparison plot of deceleration at morning and evening peak
2.4.4 停车对减速度的影响
停车对减速度的影响,见图12。由图12可见,停车与否对车辆减速度数值影响并无太大差异。车辆的3个减速度中减速度AA2最大,减速度AA1最小,符合早高峰时期减速度的特性。
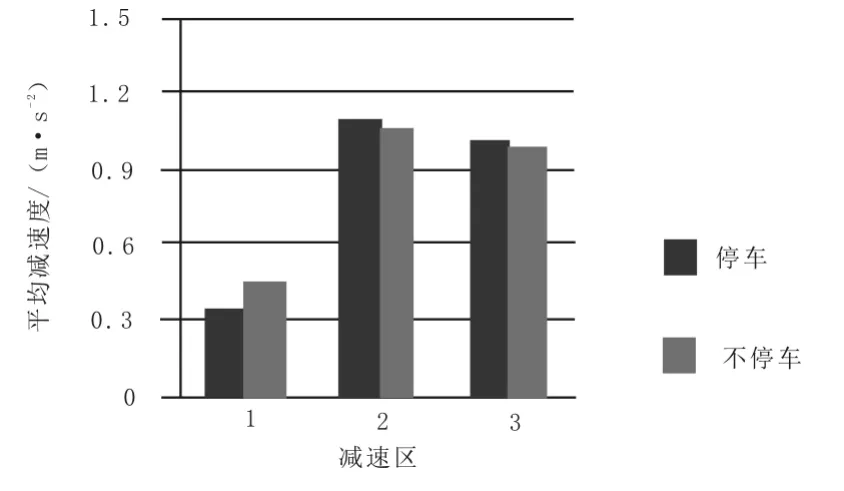
图12 停车与否减速度对比图Fig.12 The comparison plot of deceleration from vehicle weather stopping or not
2.4.5 初速度对减速度的影响
通过对速度特性的分析得知,车辆在平交口上游功能区内的速度逐渐由离散变得集中,其方差逐渐变小。在平交口车辆速度相差不大的情况下,车辆在路段的初速度越大,驾驶员就越要采取更为强烈的减速行为以保证车辆能安全顺利的通过平交口。所以,初速度越大的车辆,其减速度也会越大。
为更好体现初速度与减速度的关系,将初速度划分为5类,见图13。由图13可见,初速度低的车辆其减速度也较低;初速度高的车辆减速度也较高。

图13 初速度对减速度的影响对比图Fig.13 The comparison plot of influence of VA0on speed
3 模型构建与检验
由于减速度的大小对交通模拟模型、燃料消耗模型、尾气排放模型均具有重要的意义。其中减速区3距离停车线最近,是驾驶员必须采取减速行为的区域,也是容易发生冲突的区域。所以选择减速度3作为减速行为的因变量进行驾驶员减速行为建模。
通过上述分析可知,各个影响因素对速度及减速度均有不同程度的影响。其中,由于车型、左右转、早晚高峰、均为离散型变量,在建立模型时设置哑变量以提高模型的拟合效果。经过设置哑变量,即可将这些自变量视为连续性变量,并引入到模型中去。
自变量采用逐步回归法进行筛选,建立“最优”多元线性回归模型。其中4个自变量的t检验结果说明自变量系数均具有统计学意义,分别为车型1、车型2、初速度VA0、左右转向,结果见表4。最终,建立的减速行为统计回归模型如下。

表4 减速驾驶行为模型结果Tab.3 Model result of deceleration driving behavior

式中:AA3为减速区3的减速度,m/s2;X1为车辆左转时x3取1,右转时x3取0;VA0为初速度,km/h;
从模型的残差直方图、残差P-P图和减速度对残差的散点图中可以看出(见图14~16),残差分布比较均匀,P-P图各散点基本呈直线趋势,说明因变量减速度服从正态分布;残差围绕均线均匀分布,大部分残差绝对值都在2以内,说明方差齐。因此满足了线性回归模型的前提条件,说明模型是可用的。

图14 残差直方图Fig.14 Histogram of residuals
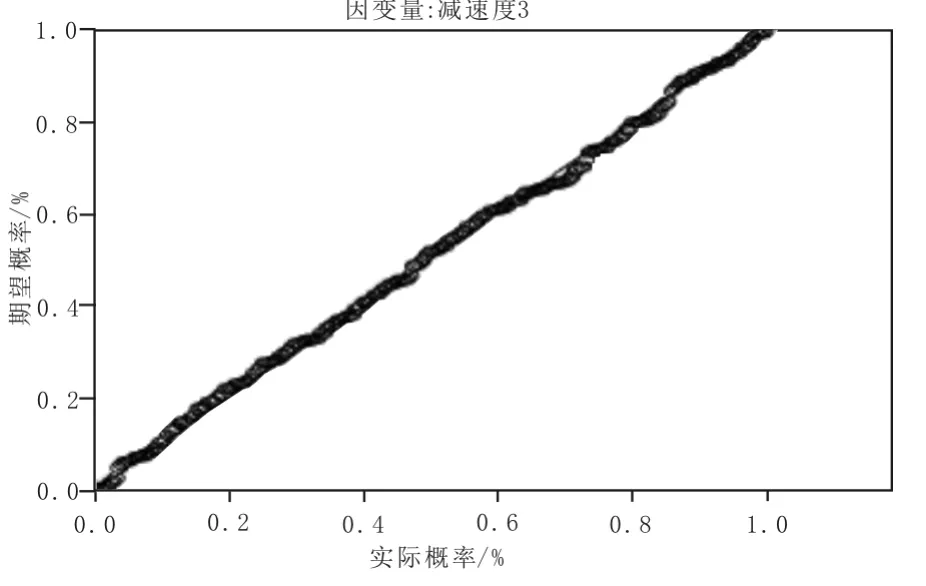
图15 残差P-P图Fig.15 The plot of residual P-P
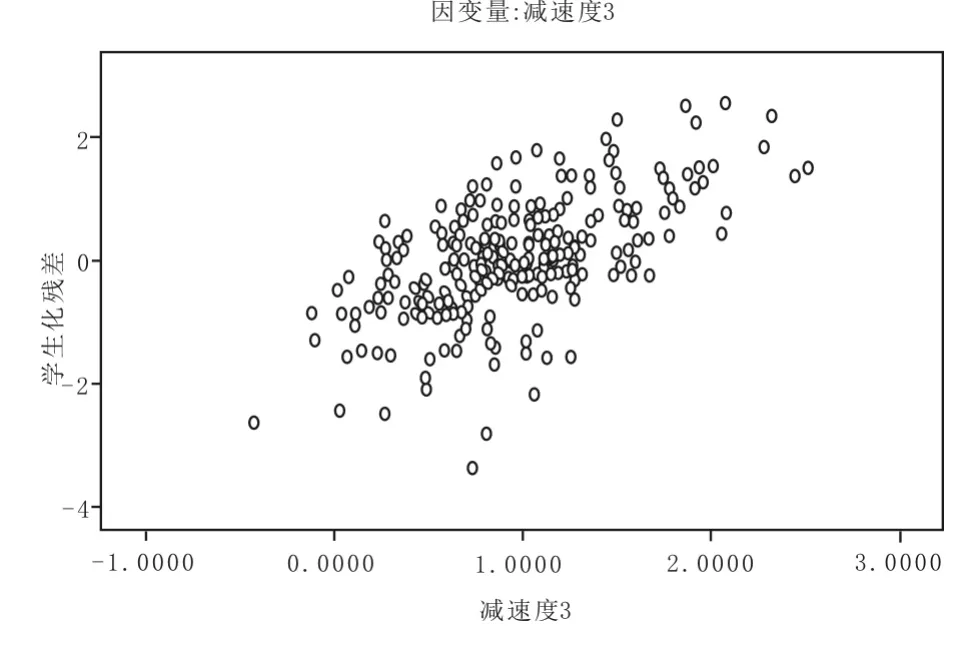
图16 速度对残差的散点图Fig.16 The scatter plot of speed of residuals
另外,将原始数据中的104组数据用来对模型进行检验,主要检验其模型预测效果。求得的变量值与原始数据对比,结果如图17所示。由图17可见,散点多集中在对角线附近,说明模型预测效果较好。
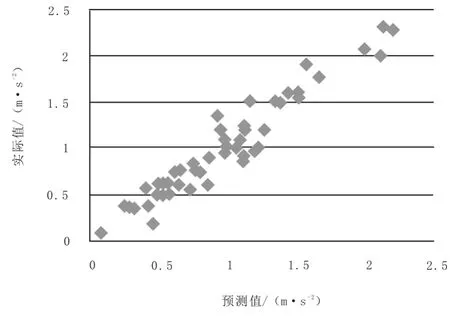
图17 104组减速度3预测值与实际值散点图Fig.17 The scatter plot of predicted value and actual deceleration3value of 104group
4 结 论
1)车辆在无信号控制公路平交口上游功能区内的车速呈现明显的下降趋势,且速度的分布逐渐由离散变得集中。即车辆距离停车线越近,车速的标准差越小,分布越为集中。
2)不同转向的车辆在平交口上游功能区内的速度和减速度有明显差异,车辆左转速度平均值较小,减速度较大;车辆右转速度平均值较大,减速度较小。因此,在支路有多个进口车道时,应在平交口上游功能区内对不同转向的车道进行分离,避免不同转向的车辆相互影响,从而保障交通安全。
3)车辆是否停车受到车辆在停车线附近的速度和减速度的影响。停车的车辆,其停车线速度普遍较小,减速度普遍较大。
4)车辆路段速度与车辆在上游功能区减速度有显著相关关系。路段车速越大的车辆,其减速度越大,即减速行为越明显。因此,为防止车辆以较大速度驶入平交口而减速不及发生追尾,建议设置必要的减速标志或减速设施(减速带、摄像头等),使得车辆平稳减速。
5)车辆在进入无信号控制公路平交口时,其减速度的变化过程是先变大后变小。车辆在刚进入上游功能区内时,由于受平交口视距的影响,减速度较小;随着车辆驶进上游功能区,受主路影响,其减速度会有所增大;之后减速度会稍微降低,以满足车辆进入平交口的速度要求。
未来研究,将在现有研究基础上对车辆在无信号控制公路平交口支路上游功能区的速度和减速度特性进行更加深入定量地分析,采用心理学方法选取对影响驾驶行为的内部因素,并结合外部影响因素来对驾驶行为进行建模,进一步观测驶入交叉口运行状态,探讨从上游功能区驶入交叉口的决策机理,从而监测、规范和引导驾驶员行为,保证无信号控制交叉口交通通行安全。
[1] 韩敏,袁黎.基于交通冲突技术的无信号平交口交通事故预测方法研究[J].公路与汽运,2012.(6):62-64.
HAN Min,YUAN Li.Traffic accidents prediction method at non-signalized intersection based on traffic conflict[J].Highways &Automotive,2012.(6):62-64.(in Chinese)
[2] 陆键,张国强,项乔君,等.公路平面交叉口交通安全设计理论与方法[M].北京:科学出版社,2009.
LU Jian,ZHANG Guoqiang,XIANG Qiaojun,et al.Highway intersection traffic safety design theory and method[M].Beijing:Science Press,2009.(in Chinese)
[3] 于增亮.基于仿真环境驾驶员临界反应能力的研究[D].长春:吉林大学,2005.
YU Zengliang.The research of driver's critical response capability based on the simulation environment[D].Changchun:Jilin University,2005.(in Chinese)
[4] 刘运通.道路交通安全指南[M].北京:人民交通出版社,2004.
LIU Yuntong.Road traffic safety guide[M].Beijing:China Communications Press,2004.(in Chinese)
[5] 漆巍巍.城市道路不良汇入与变道驾驶行为特性研究[D].哈尔滨:哈尔滨工业大学,2009.
QI Weiwei.The characteristics of risky merging and lane-changing driving behavior on urban road[D].Harbin:Harbin Institute of Technology,2009.(in Chinese)
[6] 潘福全,项乔君,陆键,等.公路平面交叉口驾驶行为研究[J].道路交通与安全.2007,7(5):16-19.
PAN Fuquan,XIANG Qiaojun,LU Jian,et al.The research of driving behavior at highway non-signalized intersection[J].Road Traffic Safety,2007,7(5):16-19.(in Chinese)
[7] 葛兴,项乔君,陆键.基于冲突的公路平面交叉口驾驶行为研究[J].交通运输工程与信息学报,2009,7(3):39-43.
GE Xing,XIANG Qiaojun,LU Jian.The research of driving behavior based on conflict at highway intersection[J].Transportation Engineering and Information Technology,2009,7(3):39-43.(in Chinese)
[8] 黄选伟.基于博弈的交叉口驾驶员行为分析[D].南昌:南昌航空大学,2014.
HUANG Xuanwei.The analysis of driver behavior based on game theory at intersection[D].Nanchang:Nanchang Aeronautical University,2014.(in Chinese)
[9] WANG Jun,DIXON K,LI Hainan,et al.Normal deceleration behavior of passenger vehicles at stopsign-controlled intersections based on in-vehicle GPS data.[J].Transportation Research Record,2005(1937):120-127.
[10] 马天宇.信号交叉口倒计时显示屏对驾驶员行为影响分析[D].长春:吉林大学,2008.
MA Tianyu.The impact analysis of countdown display on driver behavior at signalized intersection[D].Changchun:Jilin University,2008.(in Chinese)
[11] 孙正良,顾金刚,祖永昶.不同信号过渡方式对交叉口驾驶行为选择的影响.交通信息与安全,2014,32(5):174-179.
SUN Zhengliang,GU Jingang,ZU Yongchang.The effects of different signal transition mode on choice of driving behavior at intersection[J].Journal of Transport Information and safety,2014,32(5):174-179.(in Chinese)
[12] MINH C C,SANO K,MATSUMOTO S.Deceleration models of motorcycles at signalized intersections[C].85thTransportation Research Board Annual Meeting,Washington D.C.:Transportation Research Board,2006.
[13] 施晓芬.城市信号交叉口驾驶员速度控制和视觉搜索行为研究[D].西安:长安大学,2011.
SHI Xiaofen.The research of driver speed control and visual search behavior at urban signalized intersection[D].Xi′an:Chang′an University,2011.(in Chinese)
[14] 白云,石京.北京市驾驶行为与影响因素分析[J].交通信息与安全,2010,28(2):114-119.
BAI Yun,SHI Jing.The analysis of driving behavior and influential factors in Beijing[J].Journal Transport Information and Safety,2010,28(2):114-119.(in Chinese)
[15] LU J,PAN F,XIANG Q.Level-of-safety service for safety performance evaluation of highway intersections[J].Transportation Research Record:Journal of the Transportation Research Board,2008(2075):24-33.
[16] 祝站东,荣建,周伟.不良天气条件下的驾驶行为研究[J].武汉理工大学学报:交通科学与工程版,2010,34(5):1040-1043.
ZHUZhandong,RONG Jian,ZHOU Wei.The research of driving behavior under unfavorable weather conditions[J].Wuhan University of Technology:Transportation Science &Engineering Edition,2010,34(5):1040-1043.(in Chinese)
[17] 蔡娜.女性驾驶员道路交通事故影响因素分析[D].北京:北京工业大学,2010.
CAI Na.The analysis of influential factors of road traffic accidents for women drivers[D].Beijing:Beijing University of Technology,2010.(in Chinese)
