旋翼微多普勒特性实验分析
2014-11-05彭尧坤刘飞亮黄沛霖姬金祖
王 英 彭尧坤 刘飞亮 黄沛霖 姬金祖
(北京航空航天大学 航空科学与工程学院,北京100191)
当直升机处于悬停状态时,机身及其他非旋转部件的回波常淹没在地海杂波中,而以较高速度旋转的主旋翼因桨叶的旋转作用产生的回波将成为目标探测和识别的主要特征[1-2].目标或目标的组成部分的振动或转动会对雷达回波的频谱产生调制,这种现象被称为微多普勒效应(micro-Doppler effect),并建立了不同微动形式下的数学模型[3-4].直升机主旋翼的转动也是一种微动,它会对直升机的雷达回波频谱产生调制,得到的旋翼微多普勒特征反过来又能够反映目标的电磁特性、几何结构和运动特征,从而为直升机的分类识别提供新的途径.
为分析直升机旋翼及其组成部件的微多普勒效应特点,本文首先提出了在微波暗室测试单站微多普勒效应的测试方法,并采用该方法分别对多个直升机旋翼的不同桨叶数目情况下的微多普勒效应进行了实验测试;在此基础上,结合直升机可识别特征,采用短时傅里叶变换STFT(Short Fast Fourier Transform)方法对测试数据进行分析[5],并提取出相应的微多普勒效应,研究了直升机悬停状态下的旋翼微多普勒特性,从实验和理论分析出发提出了影响微多普勒特征的多个关键因素并进行了详细分析.
为验证微多普勒测试方法的正确性,首先研究了不同转速、片数旋翼微多普勒特性及旋翼微多普勒特性的频率、极化特性.实验表明,微多普勒的频率和极化影响各部件的成像分辨率,而对旋翼的特征参数估算影响不大;研究了微多普勒特性的宽频带特性,本身已有的相位调制引起了微多普勒特性的正负频率不对称,研究表明通过曲线斜率仍可估算旋翼的特征尺寸.
1 实验测试方法及数据处理
1.1 旋翼微多普勒特征和不模糊采样率
旋翼旋转导致的回波信号的时变多普勒频移,即为旋翼的微多普勒效应,根据单个桨叶的微多普勒回波公式[6-7]:

式中,L为桨叶长度;λ为入射波对应的波长;ω为桨叶旋转角频率,rad/s;β为桨盘与入射波的夹角;N为桨叶片数;k=0,1,…,N-1,为单片桨叶编号.
由式(1),可以得到主旋翼的微多普勒具有以下几个特点[5,8]:①旋翼总的回波微多普勒由N个相位等间隔的正弦曲线组成,其间隔为2kπ/N,在得到旋翼微多普勒的时频图后,根据图中正弦曲线的条数,即可确定出旋翼叶片的数目;②微多普勒的幅度与叶片的长度和入射角的余弦值成正比,当这些影响因素发生变化时,微多普勒的峰值和峰谷会发生变化,但对其频率没有影响;③微多普勒的频率直接由旋转角速度决定.
最大微多普勒频率由式(2)决定[9-12]:

式中,R为桨尖到轴心的距离;ω=2πn/60,n为桨叶转速;θ为入射方向与桨叶平面的夹角,本实验为 0°.
1.2 实验模型及实验方法
采用两种不同尺寸的碳纤维桨叶作为测试模型:桨叶a和b,同时制作了金属桨毂和连接杆,可连接2,3和4片桨叶.桨叶a的桨尖到轴心的距离为0.49m,桨叶 b桨尖到轴心的距离为0.65m,连接杆前端到轴心的距离为0.18m.在微波暗室进行测试,实验设备为安捷伦公司的矢量网络分析仪PNA8363B,暗室测试和旋翼实物图见图1.

图1 暗室测试和旋翼实物图
安装好旋翼测试模型后,首先设置对应的入射波频率、极化方式和旋翼转速.测试频率方式包含单频、宽频带信号;极化方式分为水平极化和垂直极化;通过调节直流电压调节旋翼转速.其次设置采样点数和采样频率,采样点数越多,STFT处理后的成像分辨率越高,处理时间越长.在满足Nyquist采样定律前提下通过设置中频带宽设置采样频率.最后待旋翼转速稳定后,开始回波特性测试,需要说明的是,与 RCS(Radar Cross Section)测试不同,无需进行周向旋转,在测试前也无需进行定标和背景测试,对测量取得的数据进行进一步处理,得到微多普勒相关特性.
1.3 数据处理方法
旋翼的微多普勒频率是随时间的变化而变化的,传统的傅里叶变换缺乏局部时间信息,不能提供复杂的时变频率调制信息,因此需要使用高分辨的联合时频分析方法.常见的时频变换有短时傅里叶变换、小波分析、Gabor变换、Wigner-Vill分布、伪Wigner-Vill分布、平滑伪Wigner-Vill分布等[10].各种变换手段在使用时各有利弊,短时傅里叶变换能够很好地区分多分量信号,不会产生交叉干扰项,且相关的算法研究比较成熟,因此本文对主旋翼回波信号进行短时傅里叶变换提取微多普勒特征[13-15]:

式中ω(t)为短时傅里叶变换的窗函数,这里采用高斯窗函数.通过STFT变换后,可以得到时频变换图,颜色深浅反映了目标回波能量的大小,通过在图上提取正弦曲线的条数和周期,可以求出旋翼的旋转周期和桨叶片数,然后通过提取幅值及旋翼最大微多普勒频率,可以通过式(4)估算最小的旋翼半径.

2 实验方法验证
为验证提出实验方法的正确性,对桨叶a旋翼进行实验测试,测试频率10GHz,采用水平极化,测试点数3201个,其余变化的测试参数见表1.

表1 不同的参数设置(桨叶a)
对测试结果进行STFT变换,得到微多普勒时频曲线见图2、图3,可估算出的参数见表2.
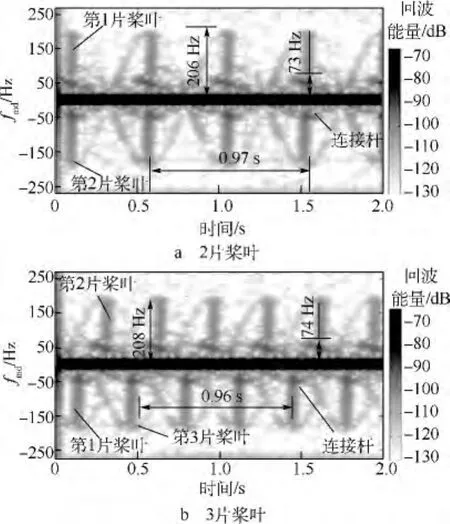
图2 测试组号为1参数设置
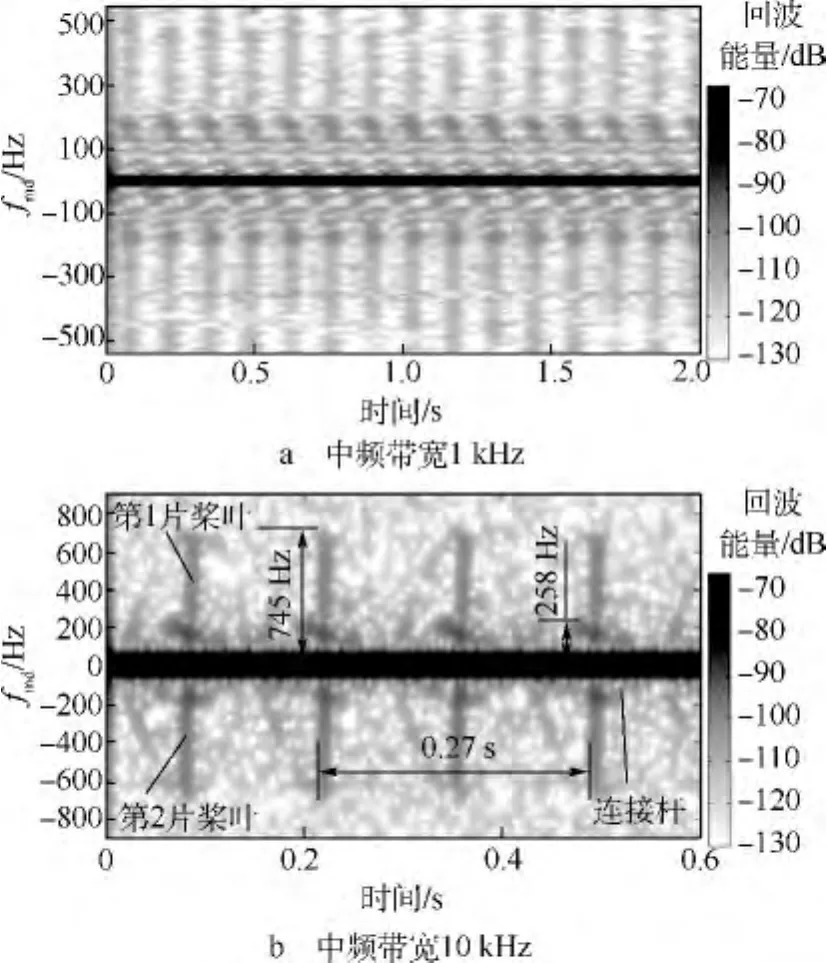
图3 测试组号为2的参数设置

表2 估算出来的参数(桨叶a)
由表2中的数据可以看出,通过测试后估算的数据和旋翼真实的参数相比,旋翼的转速大约为1r/s,周期为1s,测试的结果为0.97,0.96s;真实旋翼翼尖到桨毂中心的距离是0.49 m,而1a,1b和2b估算出的结果在0.48 m左右;连接杆真实距离为0.18 m,三者的估算距离在0.17 m左右.可见测试估算和旋翼真实的参数基本一致.在时频分析中,旋转周期是在时频曲线上直接测量的量,所以旋转周期误差主要来源为时频曲线成像分辨率带来的测量误差.时频曲线成像分辨率越低,成像越模糊,旋转周期测量误差越大.最小长度是通过式(4)计算出来的,式中最大微多普勒频率是在时频曲线上测量的量,桨叶角频率是和旋转周期成反比的相关量.估算桨叶长度和实际结果的误差主要有两部分:曲线成像分辨率带来的测量误差,分辨率越低,长度误差越大;旋转周期误差,长度误差与旋转周期误差成正比.
由图3a可知,采样频率不满足Nyquist采样定律,分辨不出旋翼的片数和旋转周期,不能估算出所需要的参数.通过改变PNA的中频带宽来增加采样率,图3b是中频带宽为10 kHz的时频图,估算参数如上分析与真实值一致.从而验证了实验测试方法的正确性,同时也说明旋翼的片数和转速不影响微多普勒特性估算.
微多普勒特性是通过沿雷达照射方向速度不同,从而带来各个散射源微多普勒频率不同,把各个部分散射源分开来.由图2a、图2b颜色的深浅代表回波能量的大小.由此可以看出,中间的横条为电机和桨毂回波,相对能量最大,连接杆处比旋翼回波能量大.要想减缩RCS,首先得减缩电机和桨毂的散射.
3 微多普勒的频率和极化特性
下面研究微多普勒的频率特性和极化特性,实验模型为桨叶b模型旋翼,转速一定,控制在1.8 r/s,中频带宽选择1 kHz,其余参数见表3.
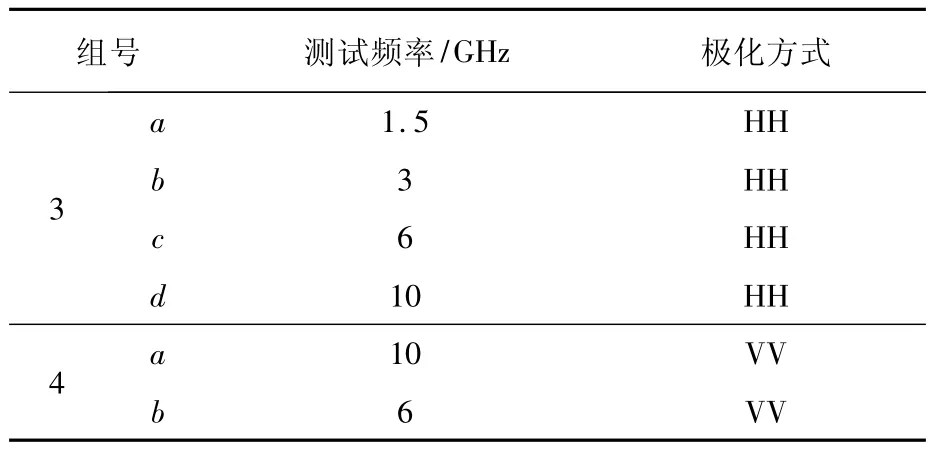
表3 不同的参数设置(桨叶b)
对测试结果进行STFT变换,得到微多普勒时频曲线见图4、图5,可以估算出的参数见表4.
由表4中估算得来的参数与实际参数相比,估算旋转周期为0.57 s左右,即大约在1.75 r/s左右,与实验设置参数(1.75 r/s)相同.桨尖到中心点的距离是0.65 m左右,结果表明旋翼的微多普勒特性不会随着雷达的频率和极化特性改变,即旋翼的微多普勒特性与旋翼本身运动特性相关,可作为旋翼识别的一种手段.
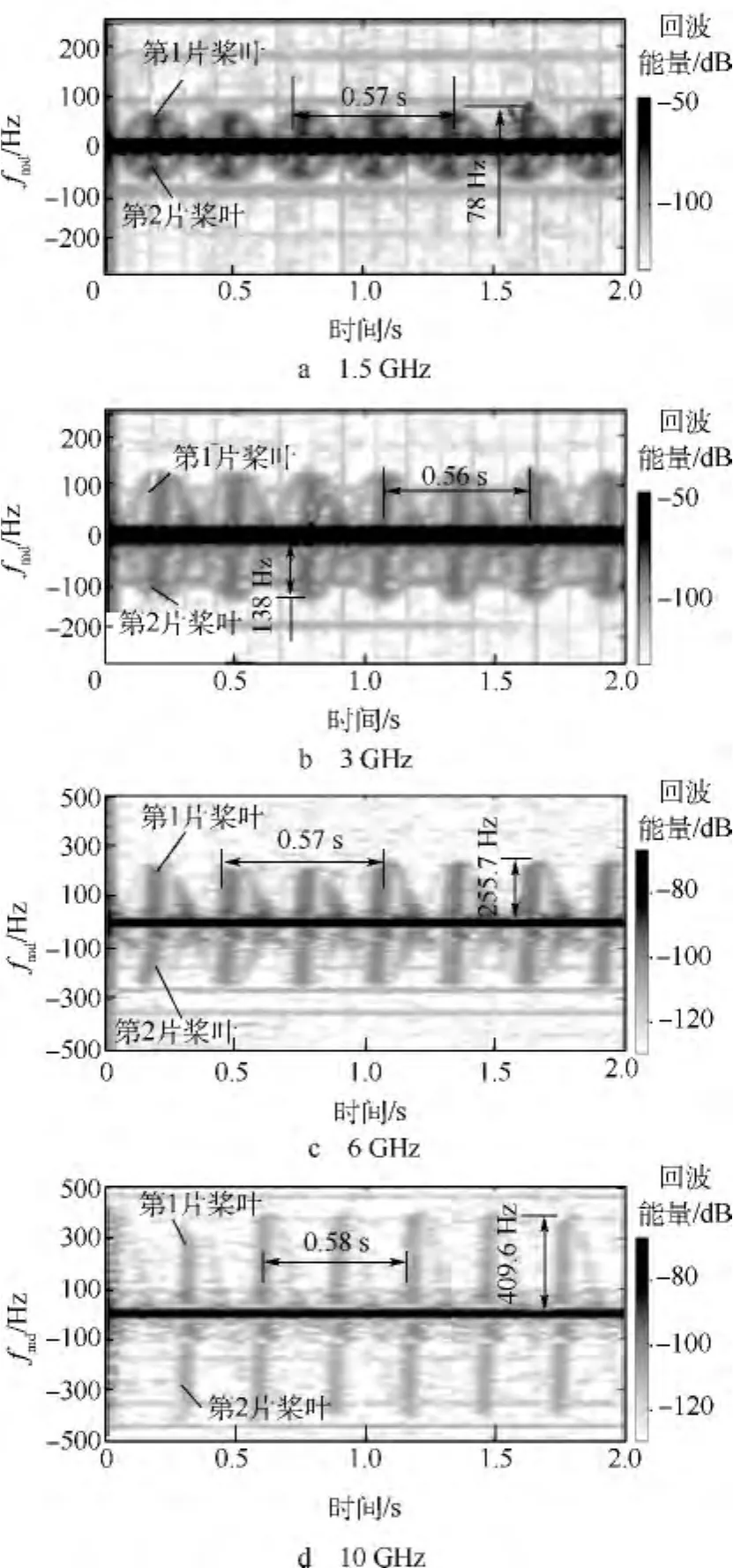
图4 测试组号为3的参数设置
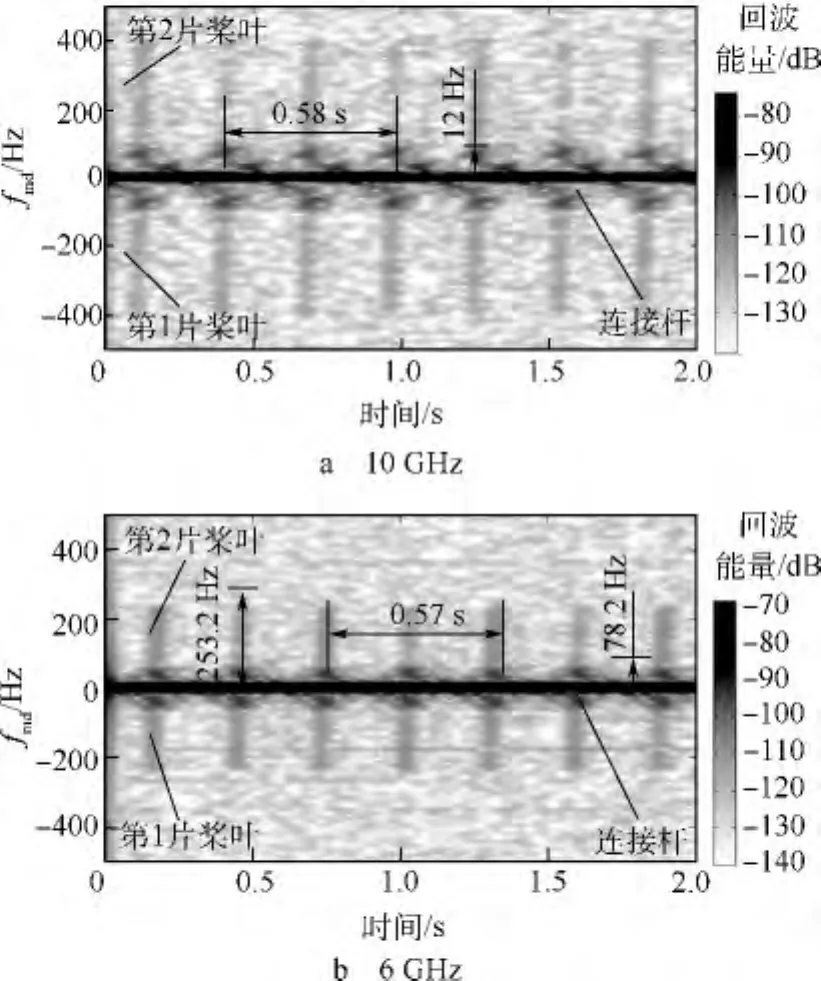
图5 测试组号为4的参数设置

表4 估算出来的参数(桨叶b)
同时由表4和图4可以看出,在水平极化时,测试频率越低估算的旋翼尺寸越接近真实尺寸,如在1.5 GHz(3a)和3 GHz(3b)时估算旋翼尺寸分别为0.67,0.62 m,在实际值 0.65 m 左右,而在6 GHz(3c)和10 GHz(3d)附近估算的参数小于等于0.6 m,与实际值差异逐步变大.由图4a~图4d,低频时,由于回波能量与目标在电场方向上投影尺寸相关性大,因此翼尖成像比较清晰,估算时比较清楚.高频时,回波能量和目标形状相关性较大,同时实验模型的翼尖采用抛物线后掠形式,导致翼尖处的成像比较模糊,使估算尺寸相对变小.同时,由颜色深浅可以看出,低频时,连接杆和电机桨毂差别比高频时小,各部件成像分辨率低,不容易区分连接杆和旋翼;高频时各部件分辨率高.
由图4、图5可以看出,水平和垂直极化相比时,桨叶和连接杆的对于极化敏感性不同,桨叶的细长体外形使得它对于极化敏感性比较强,所以使用垂直极化入射波能更好地估算出桨毂和连接杆的微多普勒特征参数,但对于桨叶的微多普勒特性估算能力则相对下降.
4 宽频带特性分析
对桨叶b进行微多普勒的宽带特性研究,桨叶片数2片,桨叶转速与上述相同,控制在1.75 r/s左右,测试频率 4 ~8 GHz,中频带宽为1 kHz经过STFT处理后的时频图如图6所示.

图6 测试频率为4~8 GHz的时频图
由图6可以看出,由于频宽已经对回波有相位调制作用,使得产生的微多普勒正负频率不对称,整体向负频率方向平移,同时正负微多普勒频率的斜率基本一致,为49.80附近.本次测试的斜率表征的是在周期为0.58 s,频率为1 GHz产生的微多普勒频移,由此可以估算出最小的旋翼半径为0.66 m,与桨叶b的尺寸0.65 m基本一致,说明可以通过宽带进行桨叶的半径特性识别.
5 结论
针对两种不同参数的旋翼桨叶,采用本文提出的实验方法进行了深入研究,实验结果表明,旋翼的微多普勒特性通过频率把各个散射部件的回波能量分开,可用于指导旋翼的静态RCS减缩设计.通过系列实验测试,得到以下结果:①频率特性,低频时,翼尖成像清晰,到桨毂中心的距离估算较为精确,但对旋翼的部件特性识别不够精确,即不容易分辨出桨叶和桨毂及连接杆的各自特征参数;高频时,特性相反.②极化特性,桨毂、连接杆和桨叶的极化敏感性不同,垂直极化时可以很好地分辨桨毂和连接杆的微多普勒特征,但对桨叶的微多普勒特征估算能力下降.③宽频带特性,产生微多普勒特性向负频率方向平移,但正负的微多普勒的斜率基本一致,同时可由斜率估算出旋翼的特征参数.
References)
[1]蒙志君,吕明云,武哲.动态桨叶RCS特性的实验研究[J].北京航空航天大学学报,2006,32(9):1003-1006
Meng Zhijun,Lü Mingyun,Wu Zhe.Experimental investigation on RCS characteristics of rotating blades[J].Journal of Beijing University of Aeronautics and Astronautics,2006,32(9):1003-1006(in Chinese)
[2]Rotander C E,Von Sydow H.Classification of helicopters by the L/N-quoutient[C]//Radar System(RARDAR 97).Edinburgh,UK:IEE Publication,1997:629 -633
[3]Setlur P,Amin M,Thayaparan T.Micro-Doppler signal estimation for vibrating and rotating targets[C]//8th International Symposium on Signal Processing and its Applications,ISSPA 2005.Piscataway,NJ:IEEE,2005,2:639 -642
[4]Chen V C.Micro-Doppler effect in radar:phenomenon,model,and simulation study[J].Aerospace and Electronic Systems:IEEE Transactions on,2006,42(1):2 -21
[5]Chen V C.Analysis of radar micro-Doppler with time-frequency transform[C]//Statistical Signal and Array Processing.Pocono Manor,PA:IEEE,2000:463 -466
[6]Chen V C.Radar signatures of rotor blades[C]//Proceedings of SPIE on Radar Processing.Orlando,FL:SPIE,2001:63 -70
[7]Chen V C,Li F,Ho S S,et al.Analysis of micro-Doppler signatures[J].IEE Proceedings-Radar,Sonar and Navigation,2003,150(4):271-276
[8]陈行勇,黎湘,郭桂蓉,等.基于旋翼微动雷达特征的空中目标识别[J].系统工程与电子技术,2006,28(3):372-375
Chen Hangyong,Li Xiang,Guo Guirong,et al.Identification of air-target based on the micro-motion radar signatures of blades[J].Systems Engineering and Electronics,2006,28(3):372 -375(in Chinese)
[9]谭源泉,王厚军,李良超,等.基于旋翼结构微多普勒特征的目标识别方法[J].电波科学学报,2013,28(1):50 -55
Tan Yuanquan,Wang Houjun,Li Liangchao,et al.Target identification method based on rotor structure micro-Doppler characteristics[J].Chinese Journal of Radio Science,2013,28(1):50 -55(in Chinese)
[10]Chen V C.The micro-Doppler effect in radar[M].Boston:Artech House,2011:110 -126
[11]Li P,Wang D C,Wang L.Separation of micro-Doppler signals based on time frequency filter and Viterbi algorithm[J].Signal,Image and Video Processing,2013,7(3):593 - 605
[12]Chen V C.Doppler signatures of radar backscattering from objects with micro-motions[J].IET Signal Processing,2008,2(3):301-311
[13]Chen V C,Lin C T,Pala W P.Time-varying Doppler analysis of electromagnetic backscattering from rotating objects[C]//The IEEE Radar.Piscataway,NJ:IEEE,2006:807 -812
[14]Thayaparan T,Abrol S,Riseborough E,et al.Analysis of radar micro-Doppler signatures from experimental helicopter and human data[J].IET Radar,Sonar & Navigation,2007,1(4):289-299
[15]Chen V C,Ling H.Time-frequency transforms for radar imaging and signal analysis[M].Boston:Artech House,2002:25 -45
