3DOF并联加载机构静力学和静刚度分析
2014-11-05樊锐刘欢王丹
樊 锐 刘 欢 王 丹
(北京航空航天大学 机械工程及自动化学院,北京100191)
并联机构由于其刚度大、承载能力强、位置精度高等优点[1],多年来一直是众多学者研究的对象.与6自由度并联机构相比,少自由度并联机构结构简单、制造成本低、控制相对容易,因此成为并联机构学新的研究热点.
静力学分析是并联机构分析的必要环节,是机构运动学分析的延续和动力学分析的基础[2],通过静力分析确定力传递特性,进而为尺度综合等运动学设计提供依据[3];并联机构刚度是末端操作器在外力作用下,由于弹性元件变形引起位移大小的度量[4],它影响并联机构在受负载情况下的定位精度[5],也是机构设计重要的评价指标.刚度分析的方法分为有限元分析法和模型解析法.有限元分析法计算简便,精确度较高,但工作量大.刚度解析模型是指机构的操作力和末端变形之间的映射.Gosselin[6]依据虚功原理,建立了空间机构操作力与末端变形间的映射;李树军等[7]考虑结构位形变化和外力影响对并联机构刚度特性进行了分析;赵铁石等[8]通过引进机构的二阶影响矩阵推导了并联机构刚度非线性映射.Wu等[9]在考虑机床所有部件刚度矩阵的前提下,利用装配法建立了5自由度混联机床的刚度模型.
本文以用于数控机床加载的3自由度并联机构为研究对象,基于螺旋理论建立了包含支链自重在内的静力学平衡方程以及考虑支链弹性变形情况下机构的刚度模型,得到机构运动平台与驱动力之间的受力关系以及机构在指定载荷下的变形分布,评价了并联机构的刚度特性,为并联机构的结构优化及性能分析提供了理论依据.
1 机构描述
本文提出的三自由度并联机构结构如图1a所示,图1b为其结构简图.

图1 并联机构结构图和结构简图
该机构由基座、动平台和连接二者的3条支链组成.3条支链均包含2条等长的S-S支链,为一平行四边形结构;支链的两端通过球铰链(S)分别和动平台与基座上的滑块相连,上端3对球铰链均匀地分布在动平台上,每对球铰链中心点连线形成一等边三角形;基座上包含3个滑块,分别安装在3个直线驱动单元(伺服电机+滚珠丝杠)上,机构的运动通过对3个滑块的直线驱动实现,移动副的运动方向如图1b所示.建立如图所示的动静坐标系Op-xpypzp和Ob-xbybzb,Ai(i=1,2,3,4,5,6) 表示动平台上的铰链点,Bi(i=1,2,3,4,5,6) 表示滑块上的铰链点.
2 螺旋理论基本概念
在螺旋理论中,一个旋量可以同时表示空间一组对偶矢量,如可以表示矢量的方向和其作用线位置;表示刚体运动学中的线速度和角速度;表示刚体力学中的力和力偶,这对于并联机构的某些分析是非常方便的.
旋量用对偶矢量表示为

其中,S称为对偶矢量的原部,是一个三维向量;S0称为对偶矢量的对偶部,也是一个三维向量,所以旋量是一个六维向量.
如果S为单位矢量,$可表示螺旋运动的单位速度矢量或者螺旋运动副轴线的单位矢量.若存在$1和$2互易积为零,即

就称$1与$2互为反螺旋,符号“◦”表示两螺旋作互易积运算,这时反螺旋可用$r表示.对应螺旋系,若存在能同时满足下列方程组:

式中$r称为该螺旋系的反螺旋.
3 静力学分析
3.1 静力学方程的建立
该并联机构用于对数控机床进行加载,动平台的中心点与机床主轴相连,因此动平台将承受机床主轴施加的力和转矩.机构在静止状态下的整体受力如图1b所示,单个支链3受力分析图如图2a所示.

图2 并联机构单支链和动平台受力分析图
忽略杆的自重,将每根杆看作二力杆,整个支链子系统的外力在沿滑块方向(即e=[1,0,0]T方向)上的平衡方程为

从而得到滑块3的驱动力和相邻两杆的受力之间的关系:

同理另外2条支链的滑块驱动力与相邻杆的受力之间的关系表示为

动平台的受力分析图如图2b所示.根据铰链对动平台的6个力的力螺旋与动平台上外载和重力的6维外力螺旋之和为0得到螺旋方程:
式中,Fe=F+Gd;$li为力fi相对于静坐标系Obxbybzb的单位线矢;Gd为动平台的重力表示;$li=[Si;Soi],Si·Si=1,Si·Soi=0,Si(i=1,2,3,4,5,6)为力 fi单位方向矢量,Soi为支链 li对动平台作用力的单位线矢螺旋,方向沿各杆轴向方向,Soi=ObAi× Si.
将式(7)写成矩阵的形式:


已知动平台与静平台的结构尺寸及位置参数就可以得到力雅可比矩阵;已知各杆的力fi,则可以得出动平台所受的合力F0.目前考虑的情况是系统处于静力加载过程且机构非奇异,故力雅可比矩阵是满秩的,则有

式中

即唯一的力F0可以确定6杆上力的大小.
3.2 支链自重对力学模型的影响
上述对机构的力分析忽略了6根杆的自重,而本机构整体尺寸不大,6根杆相较于机构的整体,其自重对机构整体力学模型的影响不容忽视.本节采用投影几何法,将6根杆所受的重力沿自身的方向矢量投影,以此对本并联机构的受力平衡方程(8)进行修正.
如图2a所示,取支链3上2根杆为研究对象,设杆件自身的重力矢量为Gi,方向竖直向下.将杆的重力在杆的单位方向矢量上投影得

式(8)可修正为

式中

其他参数含义见上文.
图3给出了动平台在x=0 mm,z=85 mm这一位置时,机构处于无负载情况,随着y的变化,在是否考虑杆的自重2种情况下支链1的受力变化图.

图3 2种情况下支链1的受力变化对比图
从图3中可以看出,无负载时2种情况下支链1的受力相差约为3 N,因此,需要对力学模型进行修正.
3.3 静力分析
通过式(4)~式(6)和式(11)可以得到并联机构动平台与驱动力之间的映射关系,根据机构动平台受到的外载可以确定3个驱动力的大小,由此可以对机构进行驱动功率的设计[10].为了反映并联机构动平台受到外力作用时,3个驱动力在工作空间的任意截面内的分布情况,本节将通过实例对其进行三维仿真.
图4a、图4b、图4c分别为动平台在 x=0 mm截面上承受Fz=-1000 N的外载时,3个驱动力在给定yz空间内的变化情况.
机构的结构参数如表1所示.
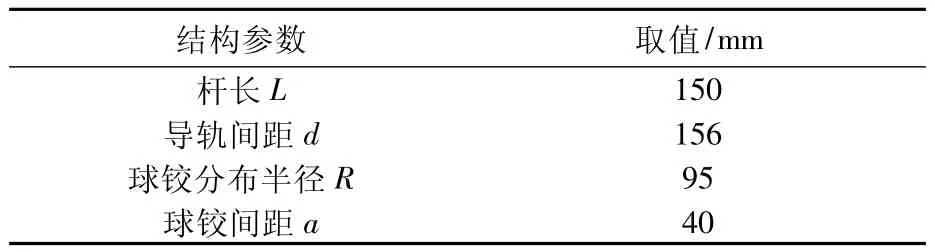
表1 并联机构的结构参数
由图4可知3个滑块的最大驱动力不超过1000 N,当动平台在x=0 mm截面上时,驱动力的大小和方向都与动平台的位置有关,以此可以为驱动元件直线单元的选取提供理论依据.

图4 驱动力在空间内的分布情况
4 静刚度研究
将并联机构的每条支链看成2个弹性杆,由静力学分析可知,在外载荷作用下,支链上的2根杆会受到沿自身轴向的作用力,由此发生弹性变形,从而引起动平台位姿发生偏移,外载荷与动平台位姿偏移量的映射关系即为并联机构刚度模型.并联机构的静刚度模型反映了机构在无驱动输入的前提下,动平台所受外载荷与之引起的形变之间的关系.
4.1 支链的静刚度
并联机构的每条支链采用伺服电机加滚珠丝杠的驱动方式,伺服电机的旋转运动转化为由丝杠带动移动副的直线运动.文献[11]中指出支链的静刚度包括驱动部件的静刚度和固定部件的静刚度两部分,可表示为

式中ka为支链驱动部件的轴向静刚度;kla,i(i=1,2,3,4,5,6)为支链固定部件的静刚度.
4.2 支链弹性变形与动平台位姿变化关系
由运动学反解模型可知,并联机构变形前满足几何约束方程:


此时并联机构变形后满足的几何约束方程为

式中δli为杆i在外力作用下的弹性变形量.
由此得到动平台位姿偏移量与杆i弹性变形量之间的映射关系:

式中,Jvl为并联机构的速度映射矩阵:

δl为由6条杆的轴向变形量构成的向量:

右上角标表示杆的序号,下同;δD为动平台位姿偏移量:

4.3 静刚度矩阵
对式(9)行全微分,同时考虑支链i在外载荷下的弹性变形得

式中,δF为作用在并联机构动平台上外载荷的变化量;Kl为每个支链的静刚度组成的六维对角阵:




符号“⊗”表示矩阵的张量积;K表示并联机构的全刚度矩阵.当矩阵非奇异时,由式(17)可得杆i的弹性变形与动平台位姿偏移量之间的关系:

整理式(15)和式(18)得

从而得到并联机构的完整静刚度矩阵:

忽略雅可比矩阵变化量对机构整体刚度矩阵的影响,即
式(20)可进一步简化:

式(21)即为并联机构的简化刚度矩阵.
4.4 静刚度特性分析
并联机构的结构参数确定后,其刚度会随着位姿的变化而发生改变.从机构设计考虑,并联机构的最小刚度应当大于给定值从而保证机构在工作空间内的精度.评价并联机构刚度的指标有刚度矩阵的迹、行列式、条件数以及特征值,本文将以并联机构刚度矩阵的最大特征值Kmax、最小特征值Kmin和KSI指标[12]作为评价指标,来观察机构在给定工作空间内的刚度分布情况.在并联机构动平台位姿和所受载荷确定的情况下,文献[7]中给出了机构的变形计算公式:

取表1所示的结构参数,图5给出了并联机构动平台在x=0 mm且受到恒定静载荷Fz=-1000 N时的变形情况,为了便于观察动平台的变形情况,此处各轴的变形均取绝对值.
如图5所示,并联机构动平台在x=0 mm处且受到恒定静载荷Fz=-1000 N时,最大变形发生在沿z轴方向,大小为0.025mm,且动平台沿各轴所发生的变形分布均相对于 y轴对称,在y=0 mm时变形最小;沿z轴方向并无此规律.

图5 静载下动平台在工作空间内的变形分布图
下文以并联机构刚度矩阵的最大特征值、最小特征值和KSI指标来评价机构在工作空间内的刚度分布.图6给出了动平台在x=0 mm处,其沿y和z轴的最大、最小特征值以及KSI分布.
如图6所示,并联机构在x=0 mm平面内的最大、最小刚度特征值和KSI均沿y轴对称分布,并且该机构在越接近y=0 mm处刚度越好,处于工作空间边界的位置刚度较差;同时还可以得出,机构动平台处于y=0 mm平面内时,z向位移越大,机构的刚度特性越好.
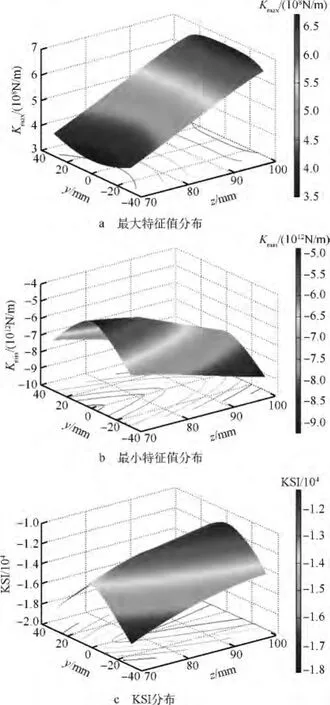
图6 并联机构刚度特性
5 结论
1)由于该加载机构的特殊性,静力学模型需要考虑支链自重对其的影响;
2)加载机构驱动力的大小和方向与动平台的位置有关,由此可以根据给定加载机构的工作空间来选取合适的驱动单元;
3)并联机构在指定位置给定载荷的工况下的变形分布相对于y轴对称,且最大变形发生在沿z轴方向;
4)并联机构在x=0mm平面内的刚度特性沿y轴对称分布,且在工作空间边界位置刚度较差.
References)
[1]Huang T,Wang J S,Whitehouse D J.Closed form solution to the workspace of hexapod based parallel machine tools[J].ASME J of Mechanical Design,1999,121(1):26 -31
[2]尹小琴,马履中,杨启志.并联机构静力学分析[J].农业机械学报,2007,38(12):201 -203
Yin Xiaoqin,Ma Lüzhong,Yang Qizhi.Statics analysis of parallel mechanism[J].Transactions of the Chinese Society for Agricultural Machinery,2007,38(12):201 -203(in Chinese)
[3]Tsai L W.Robot analysis:the mechanics of serial and parallel manipulators[M].New York:John Wiley & Sons,1999
[4]徐东涛,孙志礼,丁晓光.考虑杆件弹性变形的改进型Delta并联机构刚度特性分析[J].农业机械学报,2013,44(5):294-298
Xu Dongtao,Sun Zhili,Ding Xiaoguang.Stiffness characteristic analysis of modified Delta parallel mechanism based on bars’elastic deformation[J].Transactions of the Chinese Society for Agricultural Machinery,2013,44(5):294 -298(in Chinese)
[5]Portman V T,Chapsky V S,Shneor Y.Workspace of parallel kinematics machines with minimum stiffness limits:collinear stiffness value based approach[J].Mechanism and Machine Theory,2012,49:67 -86
[6]Gosselin C.Stiffness mapping for parallel manipulators[J].IEEE Transactions on Robotics and Automation,1990,6(3):377 -382
[7]李树军,Clement G.3-RRR平面并联机构的刚度特性分析[J].东北大学学报:自然科学版,2007,28(1):91 -94
Li Shujun,Clement G.Stiffness analysis and stiffness mapping of 3-RRR planar parallel mechanism based on CCT stiffness matrix[J].Journal of Northeastern University:Natural Science,2007,28(1):91-94(in Chinese)
[8]赵铁石,赵延治,边辉,等.空间并联机构连续刚度非线性映射[J].机械工程学报,2008,44(8):20 -25
Zhao Tieshi,Zhao Yanzhi,Bian Hui,et al.Continuous stiffness nonlinear mapping of spatial parallel mechanism[J].Chinese Journal of Mechanical Engineering,2008,44(8):20 - 25(in Chinese)
[9]Wu J,Wang J S,Wang L P,et al.Study on the stiffness of a 5-DOF hybrid machine tool with actuation redundancy[J].Mechanism and Machine Theory,2009,44(2):289 -305
[10]李永刚,宋轶民,黄田.少自由度并联机器人机构的静力分析[J].机械工程学报,2007,43(9):80 -83
Li Yonggang,Song Yimin,Huang Tian.Static force analysis of lower-mobility parallel manipulators[J].Chinese Journal of Mechanical Engineering,2007,43(9):80 -83(in Chinese)
[11]崔学良.冗余驱动支链对并联机构性能的改善及其控制方法研究[D].北京:北京航空航天大学,2010
Cui Xueliang.Research on the improvement in the capabilities of the parallel machine with the redundant leg and the control method[D].Beijing:Beijing University of Aeronautics and Astronautics,2010(in Chinese)
[12]Rezaei A,Akbarzadeh A,Akbarzadeh-T M R.An investigation on stiffness of a 3-psp spatial parallel mechanism with flexible moving platform using invariant form[J].Mechanism and Machine Theory,2012,51:195 -216
