高精度低噪声MEMS陀螺仪电容读出电路*
2014-09-06唐兴刚龙善丽
唐兴刚,龙善丽,刘 艳
(北方通用电子集团有限公司,江苏 苏州 215163)
高精度低噪声MEMS陀螺仪电容读出电路*
唐兴刚*,龙善丽,刘 艳
(北方通用电子集团有限公司,江苏 苏州 215163)
在研究电容式微机械陀螺信号通路工作原理的基础上,分析了影响电容式读出电路精度的各种非理想因素并进行了量化计算,设计了一款低噪声电容读出电路。该芯片采用高频调制原理实现了低频噪声的转移,同时提出了一款具有高电源抑制比的低噪声运算放大器,采用连续时间的电容读出方法研制了微机械陀螺ASIC电路。该芯片采用0.5 μm CMOS工艺,芯片面积为3.5mm×3.4 mm,测试结果表明,该单片ASIC的输出级噪底为-117 dB,当陀螺仪量程为±300°/s时,分辨率可以达到0.00035°/s。
MEMS陀螺仪;低噪声;解调;电荷放大器;读出电路
陀螺仪是一种用于测量角速度的惯性传感器。其广泛应用于自动稳定控制系统、惯性导航系统、汽车牵引控制系统、相机影像稳定系统和机器人控制系统等等[1-2]。虽然光纤陀螺因其精度高而常被人们用于航空、航天等领域,然而,其高昂的价格也限制了它的广泛应用[1]。MEMS陀螺具有体积小、重量轻、可靠性高、易集成等诸多优点[3],在商业和民用等领域逐渐成为当今主流的角速度检测传感器。
微机械陀螺的种类很多,按检测方式可以分成电容式、压阻式、压电式、光电式以及隧道式陀螺等[4]。电容式微机械陀螺因其具有体积小、重量轻、温度特性好以及噪声抑制能力强等优点而被广泛应用。其检测电路通常采用以下几种方式实现:开关电容电荷积分电路,连续时间电流模式电路以及连续时间电压模式电路[5]。本文设计了一款连续时间电压模式的高精度低噪声MEMS陀螺仪电容读出电路,电路采用标准的0.5 μm CMOS工艺,通过对各种噪声进行量化分析,找出影响电路噪声性能的主要因素,并采用调制/解调技术对电路性能进行优化设计,从而实现对陀螺仪微弱信号的检测。
1 系统结构
本文采用的是单支点准悬浮解耦式角振动环式结构设计。图1为陀螺结构模型图,该结构由一个驱动外环和一个检测内盘组成,驱动外环通过4个悬臂梁与检测内盘连接,而内盘也通过4个悬臂梁与中心锚点连接,整个结构通过中心锚点悬在基片之上。由于外环与内盘被两组悬臂梁隔开,因而激励与检测模态的自然频率相互隔离,从而最大限度地减小了正交误差,图中M0、M90、M180、M270为四相位驱动电极,MA、MB为驱动检测电极,NA、NB为正交误差消除电极,该陀螺谐振频率为5.8 kHz,带宽为100 Hz。工作时,由四相位驱动信号对陀螺外环进行驱动,使外环在梳齿状电极的驱动下绕Z轴旋转振动,当有一个绕X轴方向的角加速度时,陀螺将受到一个沿Y方向的科氏力作用,内盘将沿Y方向左右摆动,而摆动幅度将与科氏力大小成正比。
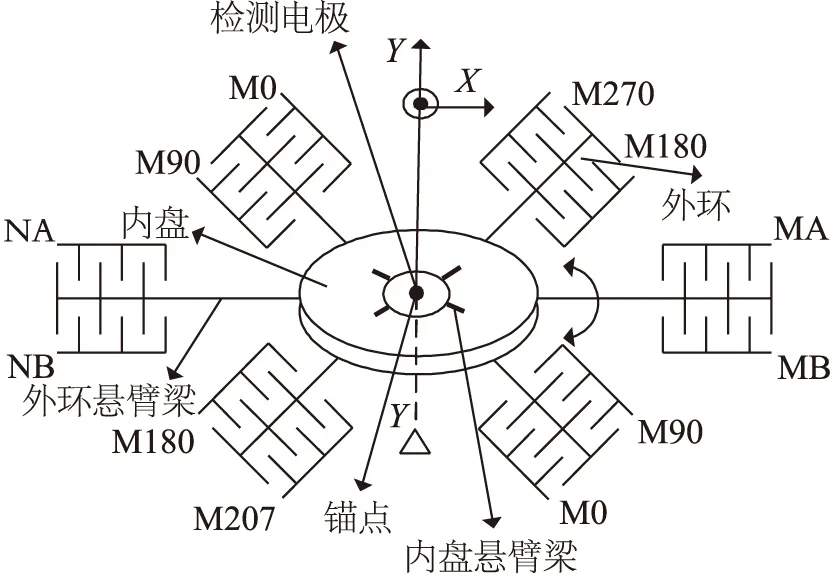
图1 单支点角振动式陀螺仪结构模型图
图2为陀螺内盘检测通道的原理框图,左半部分为陀螺的敏感结构,右半部分为电容读出电路的前端放大部分,当陀螺仪角速度发生变化时,由于科氏力的作用,在与角速度垂直的方向上产生等比例的位移,该位移的变化将引起图中检测电容CS1、CS2的变化并产生与之成比例的电流。
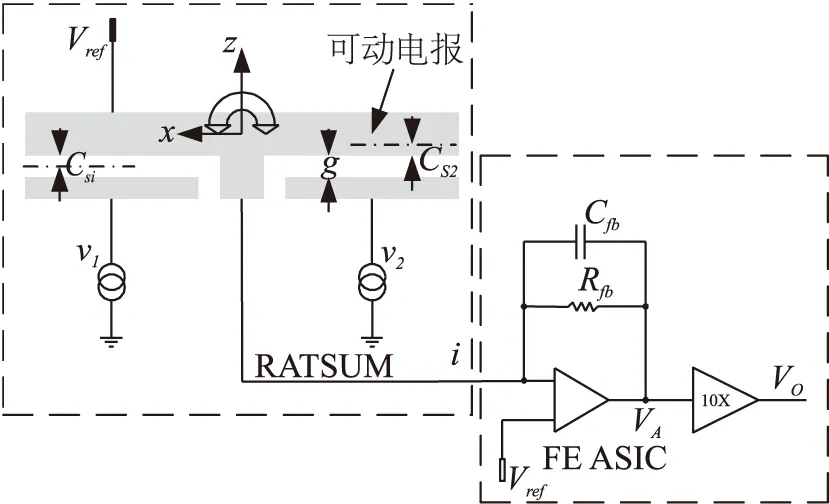
图2 陀螺检测通道原理框图
因此,在检测电路第1级电荷放大器输出电压VA为:
(1)
2 电路噪声分析
由于陀螺传感器输出信号十分微弱,对读出电路的噪声、灵敏度和器件的匹配性都提出了很高的要求。其中影响电路精度的噪声源主要有以下几种:①输入MOSFET的热噪声;②反馈电阻的热噪声;③输入MOSFET的1/f噪声;④参考电源Vref产生的参考噪声;⑤反偏二极管漏电流产生的散粒噪声;⑥电路其他部分产生的噪声[5-6]。
其中电路其他部分产生的噪声为电路内部诸如高频时钟等通过电容或电感等耦合过来的噪声,其大小可通过合理的版图设计如适当增加dummy管等方法避免。
图3为采用连续时间电压模式检测电路结构。其中CS1和CS2为陀螺检测端电容,大小为CS,D1、D2为输入端ESD内的反偏二极管,D3、D4为运放输入对管内的寄生反偏二极管,Cp为电路输入端总的寄生电容,其主要由MOSFET的栅电容Cgd和gs以及陀螺传感器和检测电路连线上的寄生电容组成,Ileak为运放第1级输入端的漏电流,其主要由ESD内的反偏二极管的漏电流之差以及运放输入对管中的反偏寄生二极管的漏电流组成,Cfb为电荷放大器的积分电容,Rfb为电荷放大器的反馈电阻。
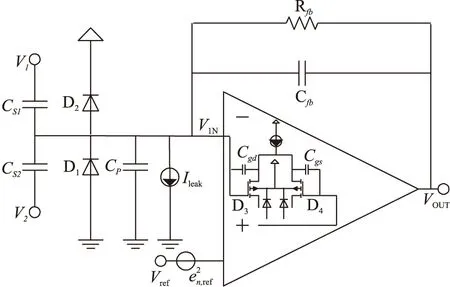
图3 连续时间电压模式检测电路寄生影响
(2)
反馈电阻产生的热噪声在Vout处大小为[5]:
(3)
由于MOS管内存在反偏的寄生二极管,其在大多数电路中漏电流小于1 pA,因此通常被忽略,但在本文中,由于陀螺传感器的检测电容很小大约为10-15F~10-18F[7],因此导致该漏电电流不能被忽略。在检测端散粒噪声电压主要包括两部分,运放寄生二极管的漏电以及输入端口处对电源和地的ESD保护结构中,二极管漏电特性不匹配或二极管大小不对称产生的泄漏电流之差,其大小为:
(4)
由该表达式可知,散粒噪声随频率衰减极快,在低频时会成为噪声的重要部分,但在高频时,其大小将可忽略。因此,散粒噪声决定了调制信号的频率下限。
(5)
其中W和L是输入MOSFET的沟道宽度和长度,gm是输入管的跨导,ID是其偏置电流,k是波尔兹曼常数,T是绝对温度,μ是载流子迁移率,COX是单位面积栅电容,K是闪烁噪声系数,q是电子电荷,f是电路工作频率。
该噪声在电荷放大器输出端的大小为:
(6)
因此,电荷放大器输出端总噪声大小为:

(7)
从上式可以看出,电荷放大器输出端噪声受热噪声、闪烁噪声、散粒噪声等诸多因素影响,其在低频和高频时反映不同的特性。在低频时电路受散粒噪声和闪烁噪声影响较大,然而该类噪声受频率影响极大,当电路工作频率升高时,噪声迅速衰减,当频率大于转角频率fC时,电路中起主要作用的噪声仅剩下白噪声。此时噪声大小可简化为:

(8)
3 电路设计
图4所示为本文设计的运算放大器的原理图,运放采用PMOS管输入的折叠共源共栅结构,输出级采用了AB类输出结构,可以很容易实现轨到轨输出。补偿电容通过共源共栅级连接到运放输出端。但是该电路的一个显著缺点是其电源抑制能力差,为改正这个缺点,我们在电路中加入跨导线性环,这种结构使得输出电流只与器件宽长比有关而与电源电压无关,有效的提高了电路的电源抑制比。同时为了进一步提高该运放的电源抑制比,该运放采用单独低压差线性稳压器(LDO)供电,LDO采用图5所示电路结构,通过该模块的使用,有效地将易受干扰的读出电路第1级与电路其他模块隔离开来,进一步提高了电路精度。
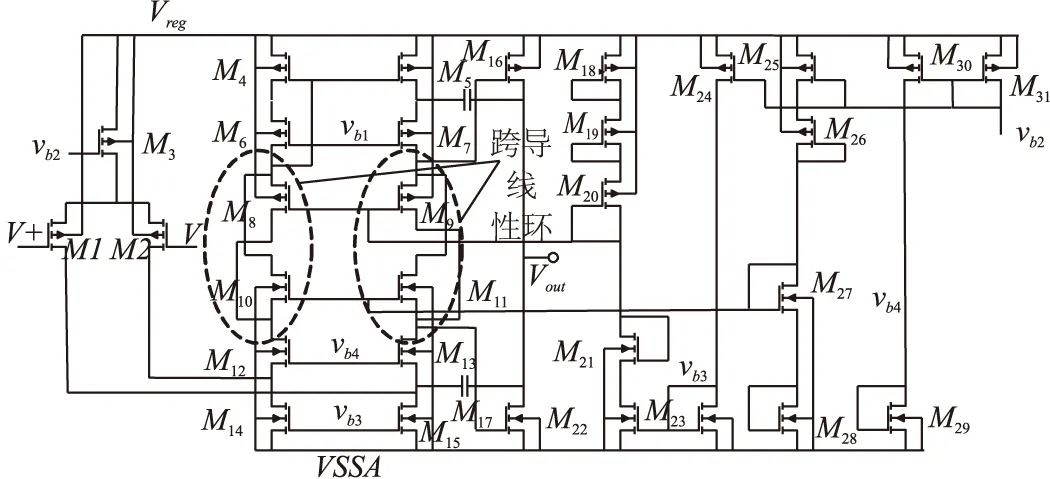
图4 低噪声跨导放大器
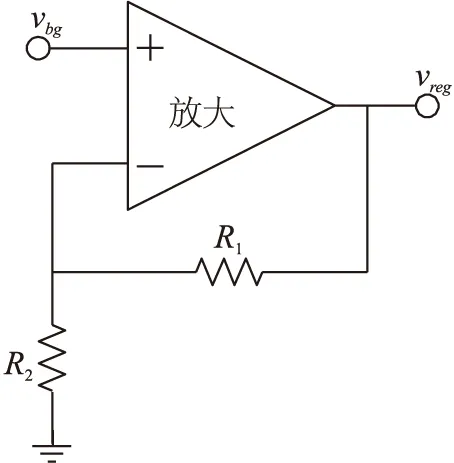
图5 线性LDO
对于该运放来说,当增大尾电流ID时,电路输出端噪声降低,然而在很多场合里,电路对功耗的要求甚至高于对电路噪声的要求,采用增大电路功耗的方法来换取低噪声在很多情况下是不合适的。为了降低运放噪声的影响提高电路精度,必须增大电路的宽长比,而宽长比的增大将会占用更大的芯片面积增加成本,同时,由于电路宽长比的增加,其输入端寄生电容Cp也随之增大,电路的线性度会随之变差,因此,为了使电路性能达到最优,取MOS管的沟道长度L为工艺所能达到的最小工艺尺寸,W则根据实际情况适当增大。表1为本文设计的低噪声运算放大器的技术指标。从中可以看到,该运放在5.8 kHz时具有7.82 nV/√Hz的等效输入噪声,电源抑制比在30 kHz时,仍能达到112 dB,虽然LDO的使用降低了该运放的动态输出范围,但该电路作为读出电路的第1级,其输出动态范围在陀螺±300 °/s量程时,仍能保持很好的线性度,并不影响信号的输出。同时,为了使该电路能够满足陀螺较高工作速率要求,因此设计该运放具有80 MHz的增益带宽积。
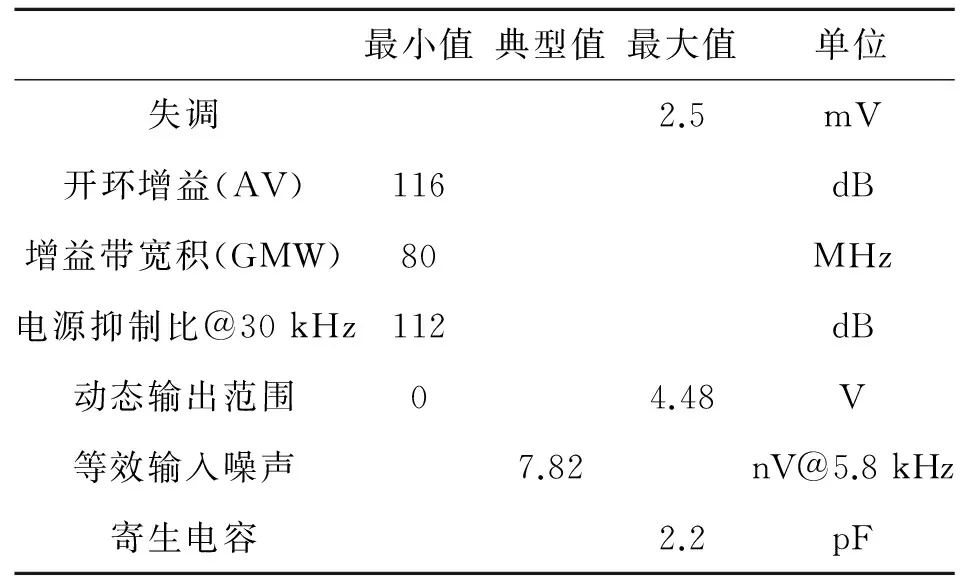
表1 低噪声运算放大器技术指标
4 调制解调技术
从式(8)我们可以看到,电路噪声受频率的影响是极大的,当频率升高时,电路输出噪声也会随之减小,有鉴于此,本文采用调制/解调技术对读出电路进行优化设计。
调制/解调技术的基本理念就是通过载波信号对MEMS陀螺仪产生的电流信号进行调制,利用载波信号和陀螺角速度信号的工作频率不同,对信号进行有选择的放大,并合理利用滤波技术对信号进行处理,最后保留放大的角速度信号输出,完成整个信号处理过程[8]~[12]。
图6为本文设计的高精度低噪声电容读出电路的设计框图。
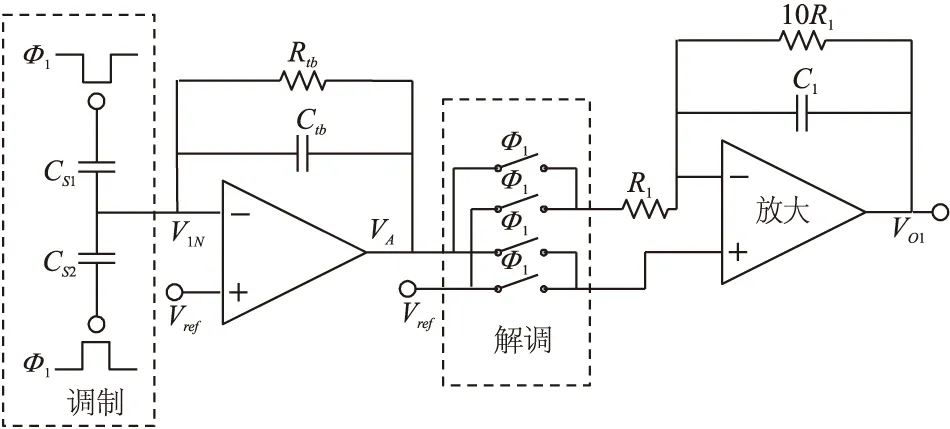
图6 高精度低噪声电容读出电路的设计框图
Ω为外加角速率,其大小等于:
Ω=cos(ωΩt)
(9)
其中ωΩ为角速率的变化率。
对MEMS陀螺仪产生的小信号进行调制,载波信号大小为:
fn=cos(ωnt)
(10)
其中ωn为载波信号的频率。则检测端电荷放大器的输出为:VA∝2·Ω×V×fn=2cos(ωΩt)·cos(ωdt)·cos(ωnt)
(11)
对该信号进行两次解调,第1次对载波信号cos(ωnt)解调,第2次对驱动信号cos(ωdt)解调,并采用滤波技术对高频信号进行滤波,最终得到与低频角速度信号成正比的输出电压VO。
VO∝cos(ωΩt)
(12)
采用调制/解调和滤波技术,我们可以将需要检测的低频角速度信号调制到高频,利用电路在高频时噪声远低于低频时噪声的特性将信号从噪声中分离出来加以放大处理,有效提高读出电路的精度。
5 封装及测试结果分析
本文采用0.5 μm CMOS工艺,芯片面积为3.5 mm×3.4 mm,调制信号频率为3 MHz。图7为该读出电路的芯片和版图照片,将读出电路与图1的陀螺结构组装在一起,采用低温共烧陶瓷(LTCC)技术,实现其小型化。LTCC基板设计有半通空腔,敏感结构芯片、读出电路组装在LTCC基板的空腔内,通过基板、线键合实现敏感结构与读出电路的互连,并在LTCC基板上设计可共晶焊接的金属围框,通过平行缝焊实现LTCC基板与金属盖板的气密性封装。MEMS陀螺仪组装与封装图如图8所示。
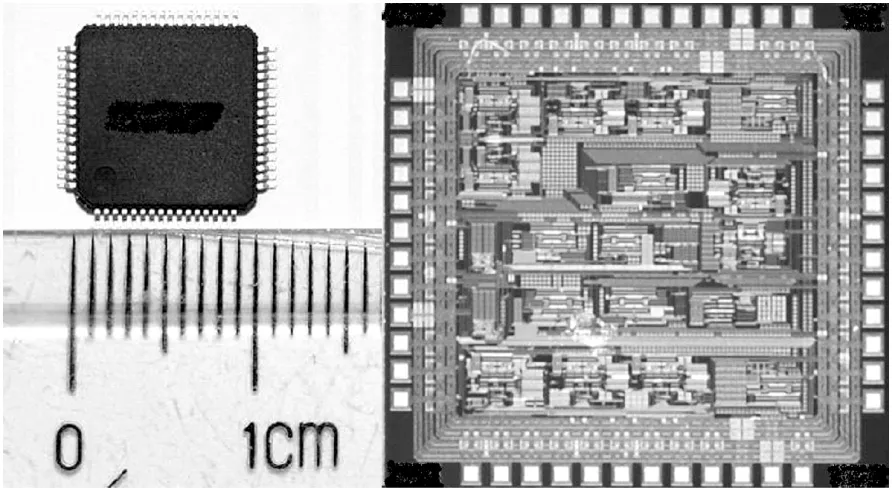
图7 读出电路芯片和版图照片
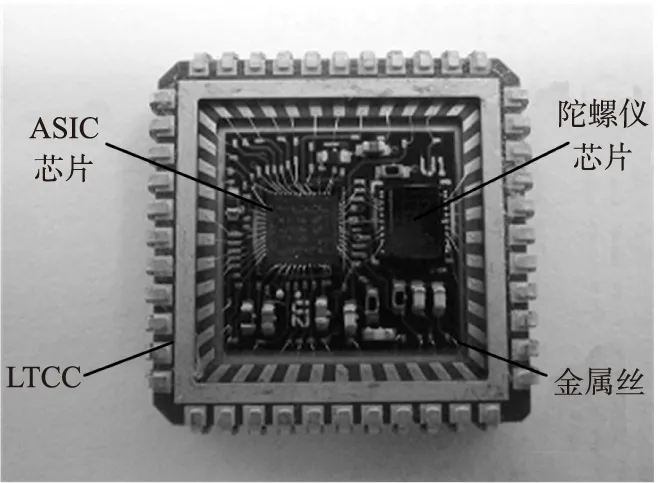
图8 MEMS陀螺仪组装与封装图
将该陀螺系统放在转台上进行联合测试,并利用频率分析仪RSA 5103A对电路输出信号进行测量,结果如图9所示。该电路的输出端噪底为-117.14 dB,等效输入电容噪声为0.116 aF/√Hz当陀螺量程为±300 °/s,陀螺分辨率可以达到0.00035 °/s。
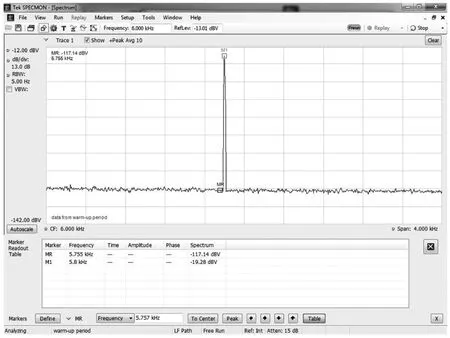
图9 读出电路第2级频率响应曲线
本读出电路采用连续时间C/V转换加调制/解调技术,通过对前端运放的降噪设计,实现了整体电路的高精度低噪声性能。与文献中所列读出电路对比如表2所示,从表2可以看到,与国内外采用相同工艺、实现相同电路功能的读出电路相比,该电路在噪声性能上得到了很大的提高。
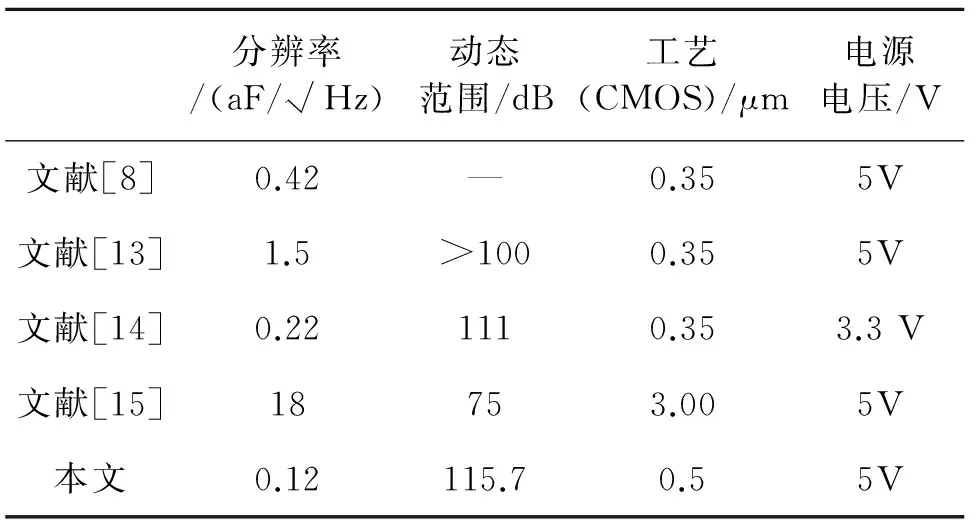
表2 本文中读出电路与文献中读出电路对比
6 总结
本文对影响读出电路精度的噪声进行了量化分析,设计了一款高电源抑制比、低噪声的运算放大器并采用调制/解调技术对电路性能进行优化,测试结果表明,该电容读出电路的输出级噪底为-117.14 dB,当陀螺仪量程为±300 °/s时,分辨率可以达到0.00035 °/s。
[1] Sheng-Ren Chiu,Chung-Yang Sue,Lu-Pu Liao,et al. A Fully Integrated Circuit for MEMS Vibrating Gyroscope Using Standard 0.25 μm CMOS Process[C]//Impact international Microsystems,Packaging,Assembly and Circuits Technology conference,2011:315-318.
[2]Jindeok Seo,Kyomook Lim,MEMS vibratory gyroscope with highly programmable capacitive interface circuit[C]//12th International Conference on Control,Automation and Systems,2012:1120-1130.
[3]李芊,徐剑芸,鲁浩,等. 一种通用的电容式微机械陀螺接口电路研究[J]. 航空兵器,2011(6):49-53.
[4]迟晓珠,崔健,闫桂珍. MEMS陀螺振动特性试验技术[J]. 传感技术学报,2008,21(4):559-562.
[5]梁亮. CMOS MEMS加速度计研究及低噪声检测电路集成设计[D]. 西安:西安电子科技大学,2010.
[6]拉扎维,模拟CMOS集成电路设计[M]. 西安交通大学出版社,2003.
[7]李锦明,高信噪比电容式微机械陀螺的研究[D]. 中北大学,2005.
[8]Tao Yin,Huanming Wu,Qisong Wu. A TIA-based Readout Circuit with Temperature Compensation for MEMS Capacitive Gyroscope[C]//Proceedings of the 2011 6th IEEE International Conference on Nano/Micro Engineered and Molecular Systems,2011:401-405.
[9]刘晓为,任轶超,谭晓昀. 适用于微机械陀螺接口电路的新型开关解调方法[J]. 传感技术学报,2007,20(8):1805-1808.
[10]蒋庆华,苑伟政,常洪龙. 电容式微机械陀螺接口电路[J]. 传感技术学报,2006,19(5):2223-2225.
[11]尹韬,杨海钢,张翀. 一种用于电容型体硅微陀螺的低噪声读出电路芯片[J]. 电子与信息学报,2010,32(1):203-209.
[12]莫冰,谭晓昀,刘晓为. 电容检测型微机械陀螺的信号检测电路[J]. 仪器仪表学报,2005,26(8):324-326.
[13]吴其松,杨海钢,张翀. 一种适用于MEMS陀螺仪的高性能电容读出电路[J]. 仪器仪表学报,2010,31(4):937-942.
[14]Lasse Aaltonen,Antti Kalanti,Mika Pulkkinen. A 2. 2 mA 4. 3 mm2ASIC for a 1000 °/s 2-Axis Capacitive MICRO-Gyroscope[J]. IEEE Journal of Solid-State Circuits,2011,46(7):1682-1692.
[15]Yazdi N,Mason A,and Najafi K,et al. A Generic Interface Chip for Capacitive Sensors in Low-Power Multi-Parameter Microsystems[J]. Sensors and Actuarors,2000,A(84):351-361.

唐兴刚(1981-),男,汉族,硕士,现为华东光电集成器件研究所工程师,主要研究方向为模拟集成电路设计,645133008@qq.com;

龙善丽(1981-),女,汉族,博士,现为华东光电集成器件研究所高级工程师,主要研究方向为混合集成电路设计,lslysy@163.com。
AHighPrecisionLowNoiseCapacitanceSensingCircuitUsedinMemsGyroscope*
TANGXinggang*,LONGShanli,LIUYan
(North General Electronics Group Co.,Ltd,suzhou Jiangsu 215163,China)
Based on the analysis of capacitive vibratory microgyroscope’s interface circuit a low noise capacitive readout circuit is presented. All kinds of non-ideal factors are discussed. A high power supply rejection ratio of a low-noise amplifier based on continuous time capacitance-to-voltage technique is presented in this paper. Using high frequency modulation principle,the circuit can improve the resolution and dynamic range by canceling 1/fnoise. This ASIC is designed and manufactured based on 0.5 μm analog CMOS process. The chip size is 3.5 mm×3.4 mm. Measurement shows that the capacitive readout circuit noise floor is -117.14 dB,When the gyro range is ±300 °/s,resolution can be achieved 0.00035 °/s.
MEMS gyroscope;low-noise;demodulation;charge amplifier;readout circuit
项目来源:(2014ZX01021101-002)
2014-06-14修改日期:2014-07-08
10.3969/j.issn.1004-1699.2014.09.008
TN432
:A
:1004-1699(2014)09-1191-05
