基于三轴加速度计的桥涵防碰撞报警装置的设计
2014-09-06杜国平
高 婵,杜国平
(南京理工大学自动化学院,南京 210094)
基于三轴加速度计的桥涵防碰撞报警装置的设计
高 婵,杜国平*
(南京理工大学自动化学院,南京 210094)
设计了一种基于三轴加速度计ADXL345的桥涵防碰撞报警装置,它能够及时检测桥涵限高门架的碰撞及倾斜情况,并将碰撞信息发送至远程监控端。将装置安装在限高门架上,一旦碰撞加速度超过系统设定阈值,加速度计产生中断信号,微控制器联网报警。由于装置安装环境的特殊性,系统必须是一个无源系统。电能依靠锂电池提供,为延长系统的使用周期,采用太阳能充电。为进一步减少系统能耗,对电源模块进行管理。电源模块的设计保证系统能稳定持久地运行。
三轴加速度计;碰撞;倾斜;无源系统;太阳能充电
近年来,铁路和公路的迅速发展极大地方便了人们的日常生活,然而频发的交通事故也带来了严重的威胁[1]。铁路桥涵已经安装了限高门架,但是仍有车辆强行通过的情况发生,被撞倾斜的门架存在极大的安全隐患,可能会给后续通行车辆带来二次伤害从而引发交通事故甚至影响铁路的正常运行。为保证桥涵和车辆人员的安全和铁路公路的正常运行,在限高门架上安装防碰撞报警装置有着极大的意义。
本系统采用三轴加速度计代替倾角传感器来测量碰撞力和倾角。ADXL345加速度计是一种微机械电子系统(MEMS)的新型全固态加速度计,相比传统的加速度计具有体积小、重量轻、可靠性高、功耗低、易于数字化及智能化等一系列优点,而广泛应用于航空航天和汽车等领域[2]。另外,ADXL345内置的中断系统可以在满足一些特定条件时向微处理器发出中断请求。这样就大大简化了算法的复杂性,也减轻了微处理器的工作负担[3]。因此,本文设计了一种基于ADXL345加速度计的防碰撞报警系统。
本系统为无源系统,采用两块锂电池供电,并且对电源进行管理。另一方面采用太阳能充电系统对锂电池进行充电,保证系统不会因电量不足导致报警失灵,造成事故,并且延长了系统寿命,避免了更换电池带来的不便和开销。
1 总体设计
桥涵报警装置主要由前端加速度采集模块、控制模块、电源管理模块以及GPRS模块等组成。电源管理电路用于实现对太阳能和锂电池供电无缝切换、锂电池的过充过放保护、主电池和备电池自动切换等功能。本系统以嵌入式芯片MKL14Z64VFT4作为核心控制器件,系统的总体结构框图如图1所示。
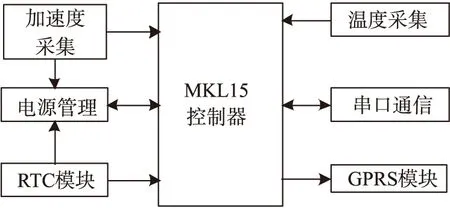
图1 系统总体框图
未发生碰撞情况下,控制器及GPRS模块断电,利用外接RTC的闹钟功能产生中断信号(低电平有效)为系统上电,进行系统自检;发生碰撞时,若碰撞加速度大于所设定的阈值6 g时产生中断,系统上电,计算倾斜角,开启GPRS模块,将信息发送给远程控制中心。由于加速度计存在零点温度漂移现象,需要采集加速度计的温度进行补偿,串口通信模块用于调试。
1.1 加速度计测量原理
ADXL345模块上电后,加速度使惯性质量偏转、差分电容失衡,使传感器输出与加速度成正比的电压值[4]。模块对得到的电压值进行模数转换后进行数字滤波,再存入DATAx、DATAy、DATAz(地址为0x32~0x37)寄存器,依次保存X、Y、Z轴低、高有效字节。ADXL345不直接测量倾斜角度,而是通过测量静止状态下X、Y、Z三轴的加速度,利用重力加速度与其在三轴加速度传感器的X、Y、Z三轴的分量关系,计算各轴与重力加速度的夹角,从而得出系统与自然轴的倾角[5-6]。重力加速度在三轴的分量与倾角关系如图2所示,由此可推导出倾角解算公式[7]:

(1)

(2)

(3)
其中,AX、AY、AZ为重力加速度在X、Y、Z三轴的分量。
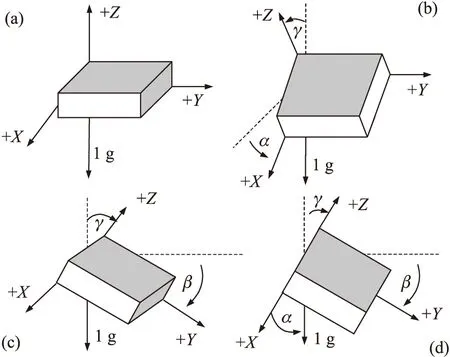
图2 ADXL345三轴加速度分量与倾角关系
1.2 电源管理方案
由于桥涵报警装置安装在限高门架上,故采用锂电池和太阳能电池结合的供电方案,两者实现无缝转换,有太阳光时太阳能电池板给锂电池充电并给负载供电,系统各个模块都保持上电;无太阳光时,由锂电池供电,此时只有加速度计和外接RTC芯片DS3231上电,MCU和GPRS模块断电。若有碰撞产生,则产生中断,开启MCU和GPRS模块电源,联网报警之后系统断电。这样一来,在实现防碰撞报警功能的同时最大限度的节省电能。
两块锂电池电压为均为4.2 V,容量均为5 AH。系统每分钟自检,两块电池能保证系统在无太阳能充电情况下连续149天正常工作,充分满足了极端天气下的工作时长需求。
2 硬件设计
为节省电能,对系统功耗要求很严格,因此在硬件选型上,尽量选用低功耗的器件。加速度计芯片ADXL345具有自动调节功耗的功能,与输出数据速率成正比[8]。此外,在静止期间ADXL345会自动切换到休眠模式,实现进一步省电。主控制器选用飞思卡尔公司Kinetis系列MKL14Z64VFT4微控制器,它基于ARM Cortex-M0+内核,是目前市场上最节能的微控制器,静态功耗低至1 μA[9]。
2.1 加速度计硬件电路
加速度计模块是由ADXL345和去耦电容组成,硬件电路如下图3所示。

图3 加速度计电路
加速度计ADXL345采用+3.3 V典型电压供电,由锂电池提供,保证不论有无太阳能,加速度计都能正常工作。电源引脚VDD端加0.1 μF的陶瓷电容和1 μF/10 V的钽电容用于消除噪音。

2.2 电源管理硬件电路
电源模块由前端太阳能光伏板、升降压电路和锂电池充放电管理电路以及DC-DC直流变换电路组成,如下图4所示。

图4 电源电路
选用多晶硅材质的太阳能光伏板,保证功率输出的稳定性和持久性。根据产品的尺寸大小以及负载功率大小选择工作电压为+9 V、功率为3 W的光伏板,通过升降压电路将采集到的太阳能转化为稳定的+4.8 V直流电压,升降压芯片选用TI公司的TPS63060,输入电压范围为+2. 5V~+12 V,结合太阳能电池板输出电压范围,升降压电路的有效电压输入为+2.5 V~+9 V,保证最大限度地提高太阳能的利用效率。
充电管理电路采用TI公司的BQ24075,其特有动态电源路径管理(DPPM),可在为系统负载供电的同时独立地为电池充电,且带有SYSOFF输入的电池断开功能[11]。本文将ADXL345和外接RTC闹钟中断引脚接至此引脚,满足了正常情况下控制器断电以及太阳能和电池供电无缝切换的要求。系统采用两块锂电池供电,其中一块留作备用,防止主电池没电系统掉电。无太阳能情况下,优先采用主电供电,若主电没电,则自动启用备用电池供电;有太阳能时,优先给备用电池充电,保证备用电池电能充足,给系统稳定运行提供了有力的保障。利用三极管组合开关门电路实现主电池和备电池自动切换。
系统控制器及外围器件用电电压分别为+3.3 V和+4 V,其中+3.3 V分为CY3.3 V和MCU3.3 V,前者给加速度计和外接RTC芯片供电,不能掉电,由锂电池直接提供;后者给控制器供电并转换得到+4 V电压,可掉电,由太阳能或者锂电池提供。
为防止长时间阴雨天气两块电池电量耗尽对电池造成不可逆转的损坏,设计过放保护电路,采用电压检测器HT7033A,检测到电池电压VBAT<+3.3 V时,输出低电平至VDD/+3.3 V转换芯片SPX3819M5-L-3.3使能脚EN(高电平有效),禁能电压转换,断开负载,实现对电池的保护。
3 软件实现
3.1 软件总体设计
软件设计主要包括系统初始化、加速度采集、倾角解算、温度采集及补偿、外部RTC闹钟设置、串口通信、电源管理、GPRS通信等。系统软件总体设计流程图如图5所示。

图5 系统软件总体流程图
3.2 SPI通信
ADXL345作为从机通过SPI与MCU进行通信,图6是ADXL345四线式SPI的时序图。时序方案按照时钟极性(CPOL)=1、时钟相位(CPHA)=1执行[12],即SCLK下降沿时更新数据,SCLK上升沿时进行采样。
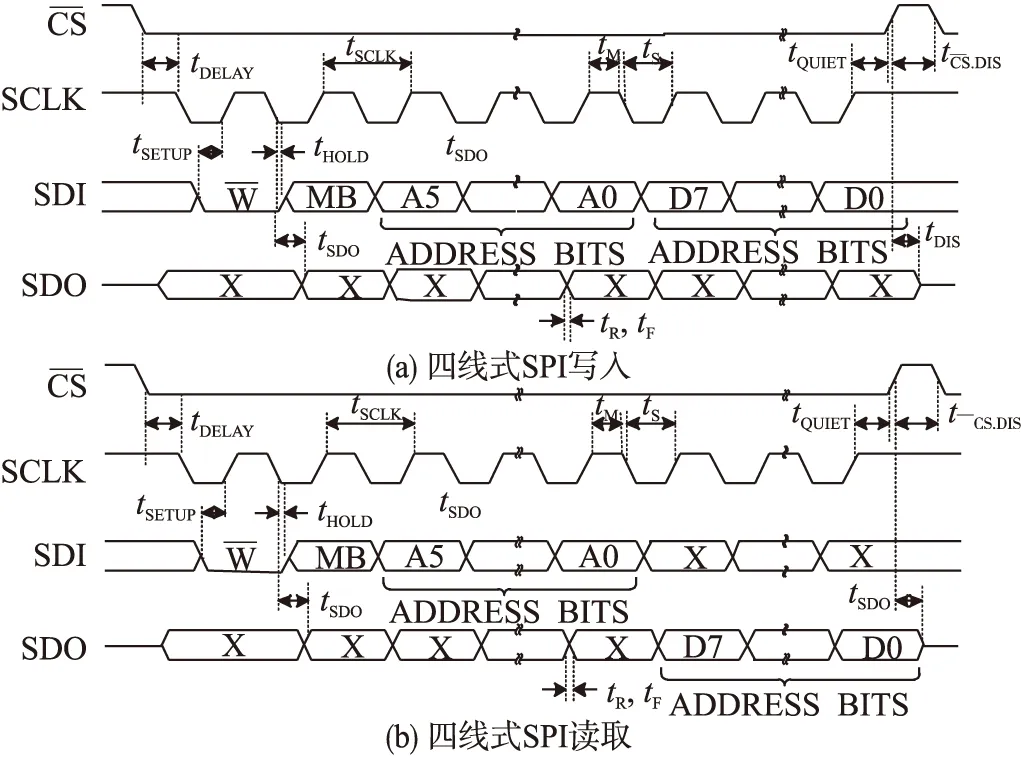
图6 四线SPI读写时序

3.3 ADXL345初始化
MCU上电时,要对整个系统进行初始化。主要包括系统时钟初始化、MCU端口初始化、外围芯片初始化等。这里主要介绍ADXL345的初始化。ADXL345有2种工作模式:查询模式和中断模式。当系统自检时设置为查询模式,发生碰撞时为中断模式,故每次断电之前都要将其设置为中断模式,这样发生碰撞时才会产生中断信号开启MCU电源。
ADXL345中断模式初始化设置为测量模式工作,四线式SPI通信,低电平有效的终端输出,13位全分辨率模式,输出数据右对齐,±16 g量程,采样频率为100 Hz,使能X、Y、Z三轴Activity中断,阈值设置为6 g,模式为AD-coupled,即直接将三轴的加速度值与6 g相比,任何一个轴加速度值超过阈值,都会产生中断,并将其映射到INT1引脚。查询模式除了禁能中断之外,其他寄存器配置与中断模式一致。
3.4 加速度及倾角处理
在本系统中,加速度计的性能的优劣直接影响到报警系统的可靠性。加速度计测量输出误差主要来源于制造工艺、安装方法、外部环境等方面,其中环境温度对测量输出的影响尤为突出[13]。为提高精度,将读取的加速度值进行零点温度补偿之后计算得到倾角值。倾角处理流程如下图7所示。
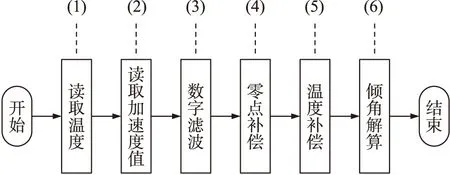
图7 倾角处理流程图
①读取温度。温度采集芯片DS18B20工作温度范围是-40 ℃~85 ℃,首先判断是否在这个范围内,若不在,温度值小于-40 ℃以-40 ℃为当前温度,大于85 ℃以85 ℃为当前温度。考虑到系统的健壮性,当装置处于极端温度条件下倾角计算值仍有较高的准确度[14]。
②读取加速度值。加速度采样频率为100Hz,即每10 ms采集新的加速度值存到DATAx、DATAy、DATAz寄存器中,为了防止在更新数据时采样,产生差错,将三次采样得到的加速度值比较,取其中至少两次相同的加速度值作为一次采样的有效结果。
③数字滤波。为消除采集过程中的噪声等意外因素的干扰,本设计对加速度值进行数字滤波,选择递推平均滤波算法,求得50次采样平均值作为最终的加速度值输出。
④零点补偿。本系统安装在限高门架上,门架不能保证绝对水平,且每个门架的倾斜角度有所不同,故装置安装完毕,安装人员确定安装正确后,将此时的位置设为相对水平位置,按下按键,将第1次采集到的加速度值作为零点补偿值,即相对于水平静止时有6 g的加速度增量则认为是一次有效碰撞产生。
⑤温度补偿。温度对加速度计的影响直接表现为加速度值的零点漂移,故此时需要对加速度进行温度补偿。将装置进行高低温试验,用算法采集温度及其加速度偏移量。补偿值为实验测得值与实际值之差,这里要以当前测得值减去补偿值得到实际值[14]。
⑥倾角解算:经过以上5步处理之后根据1.1节式(1)、(2)、(3)得到装置3个方向的倾角,单位为度。
将装置置于相对水平位置,固定,进行碰撞测试,测得校正前后加速度值和倾斜角如图8所示。

图8 加速度和倾斜角输出波形
由图8可以看出,装置的安装位置并不是绝对水平的,其水平方向有加速度分量,即有一定的倾斜角度。为避免误差对测量精度的影响,将安装位置看作相对水平面,将初始静止时的加速度值作为补偿值,补偿之后,在相对位置的误差基本趋于0,提高了系统的可靠性。
4 结语
本文设计了基于加速度计ADXL345的桥涵防碰撞报警装置,其硬件方面电路连接简单,接口丰富,具有极大的灵活性和可扩展性。系统在器件选择上尽可能选用低功耗器件,满足系统节能省电的要求。此外,设计电源管理电路,使得静止常态下,系统除加速度计和RTC芯片之外全部断电,当自检时间到或者发生碰撞时才上电,锂电池结合太阳能的供电方式不仅绿色环保,而且大大地延长系统使用寿命,提高了系统的可靠性。软件方面着重介绍了四线式SPI时序、读写操作、加速度值和倾角处理程序,具有良好的可移植性和健壮性。经验证,此装置能实时检测加速度值及倾角变化,并且具有较高的稳定性和准确性。
[1] 徐叶雷,方勇. 基于MEMS加速度计的车用自动呼救系统[J]. 传感技术学报,2009,22(6):887-892.
[2]范成叶,李杰,景增增. 旋转弹用三轴加速度计安装位置误差标定补偿技术[J]. 传感技术学报,2013,26(10):1352-1356.
[3]秦瑀阳. 老年人跌倒检测报警装置的研究与设计[D]. 大连:大连海事大学,2013.
[4]徐晓翔,陈文芗,叶军君. 基于三轴加速度传感器的倾角测量系统的设计[J]. 传感器世界,2012,(7):32-36.
[5]段晓敏,李杰,刘文怡. 基于MEMS加速度计的数字倾角测量仪的设计[J]. 电子设计工程,2009,17(8):71-72.
[6]袁西,陈栋,田湘,等. 三轴数字加速度计ADXL345及其在捷联惯导中的应用[J]. 电子设计工程,2010,18(3):138-140.
[7]唐立军,滕召胜. 电子秤倾角自动检测与称量误差补偿方法研究[J]. 电子测量与仪器学报,2011,25(1):61-67.
[8]Analog Devices,Inc. ADXL335 Data Sheet[EB/OL]. http://www. analog. com/static/imported-files/data_sheets/ADXL345. pdf,2013-02.
[9]Freescale Semiconductor,Inc. KL15 Sub-Family Reference Manual[EB/OL]. http://cache. freescale. com/files/32bit/doc/data_sheet/KL15P80M48SF0. pdf?fasp=1&WT_TYPE=Data%20Sheets&WT_VENDOR=FREESCALE&WT_FILE_FORMAT=pdf&WT_ASSET=Documentation&Parent_nodeId=1339526302470713736032&Parent_pageType=product&Parent_nodeId=1339526302470713736032&Parent_pageType=product,2014-03.
[10]Tomoaki Tusuzki,ADXL345 Quick Start Guide[EB/OL]. http://www. analog. com/static/imported-files/application_notes/AN-1077. pdf,2010.
[11]Texas Instruments,Inc. BQ24075 Data Sheet[EB/OL]. http://www. ti. com. cn/cn/lit/ds/symlink/bq24072. pdf,2014-1.
[12]Christopher J Fisher. Using an Accelerometer for Inclination Sensing[EB/OL]. http://www. analog. com/static/imported-files/application_notes/AN-1057. pdf,2010.
[13]张丽杰,常佶. 一种MEMS加速度计温度模型辨识及温度补偿方法[J]. 传感技术学报,2011,24(11):1551-1555.
[14]顾中林. 移动式起重机姿态安全传感器的设计与实现[D]. 南京:南京理工大学自动化学院,2009.
高婵(1989-),女,汉,辽宁省瓦房店市人,硕士研究生,专业为控制工程,研究方向为嵌入式系统应用开发,gaochan_gxc@163.com;
杜国平(1959-),男,高级工程师,硕士生导师,主要研究方向为工业自动化和计算机控制等,dgp@mail.njust.edu.cn。
DesignofBridgesandCulvertsAnti-CollisionAlarmDeviceBasedonThree-AxisAccelerometer
GAOChan,DUGuoping*
(College of Automation,Nanjing University of Science and Technology,Nanjing 210094,China)
The paper has designed a anti-collision alarm device based on three-axis accelerometer ADXL345. It can detect collision and incline situation of bridges’ and culverts’ height-limit portals and send the information to the remote monitoring terminal. The device is installed on the height-limit portals,once the crash acceleration exceeds the setting threshold,the accelerometer generates interrupt signal to drive the microcontroller connect to the network and give an alarm. Due to the special nature of the device installation environment,the system must be a passive system. The power is provided by the lithium battery which can also be charged by solar energy,at the same time the power module is managed to reduce the energy consumption further. This design of power module ensures stable and lasting operation.
three-axis accelerometer;collision;incline;passive system;solar charging
2014-05-06修改日期:2014-07-17
10.3969/j.issn.1004-1699.2014.09.005
TP212.9
:A
:1004-1699(2014)09-1178-05
