移动式区间交通量信息采集与分析
2014-08-06李卓蓉王震宇
李卓蓉,王震宇,张 平,郑 冰
(浙江省交通科学研究院,杭州 310006)
0 引言
交通量信息采集与分析是指对选定公路的某路段交通流量信息进行采集与分析。通过交通量调查可掌握公路网、各条路线、各路段交通流量的大小、构成、时间分布、空间分布、道路拥挤状况等特性,提高运输效率,保障交通安全[1]。
交通量调查分为连续式调查和间隙式调查。交通量调查最初为人工划“正”字的方法,这种方法是最原始的。如果观测人员的专业知识过硬、责任心强、坚守岗位,那么这是最精确、最保守的一种方法。它的缺点是若部分观测人员专业知识不够,常有错误划分车型、观测不认真、漏岗甚至弄虚作假的现象发生,使得观测数据不准确。后来出现了半自动观测仪,半自动观测仪是一个有12个按键的计数器,每一个按键上部贴有一个标签,各自代表一种车型。使用半自动观测仪比人工划“正”字减小了工作强度,但是如果技术有误,没有原始记录可查[2]。
随着智能交通技术[3-4]的发展,近年来全自动观测仪也逐渐投入到实际使用当中。全自动观测仪采用红外技术并在观测路段埋设线圈。运用红外技术根据车辆的轴间距判断车型,而通过预埋的线圈可以对过往车辆进行计数,并可分上、下行。如此一来,便可对车型、地点车速、车辆数等数据进行准确的采集。这种观测方法因为省去了手工输入环节,因此不受人为因素影响,其观测数据也最为准确。
在交通量调查中速度指标是交通运行情况的基本量度。为了探求公路发展的趋势,制定公路工程技术标准,分析公路经济效益与线形几何设计是否合理,估计道路交通阻塞程度,检验公路养护管理优劣及交通控制效果,事故分析,评价道路服务质量及通行能力等多方面都需要对当前路面的车速进行测定。尤其是对于车辆通过较长道路区间 (或整条线路)的速度进行调查 (包括行驶车速、综合车速、运行车速、临界车速),观测车辆运行速度情况,借以研究、分析道路通阻情况、服务质量、通行能力以及运营管理水平,可为提高道路通行能力、改善道路质量、改善营运管理提供重要的基础资料。因此,2010年11月由国家交通运输部制定的《公路交通情况调查统计报表制度》明确规定在上报报表及电子资料时需填报行程车速(区间车速)。而目前广泛使用的雷达枪式车速调查设备只能测出车辆的瞬时速度,即地点车速,无法反映车辆区间速度情况。观测车辆区间运行速度目前通常采用人工记车号法,不仅观测劳动强度大,而且精度难以保证。
本文研发的移动式区间交通量信息采集、分析设备 (如图1所示)一方面可以对通过选定路段的所有车辆进行准确地区间测速,另一方面,可以针对任意路段进行区间车速的测量,自带蓄电池(至少可连续工作24小时),受环境约束性小。
因此,此设备的开发和应用一方面可以在降低劳动强度的前提下极大地提升基层公路管理部门的工作效率;另一方面,由于所采集的数据更加准确、更加全面地反映实际交通流的情况,因此能更好的为管养部门的决策提供支持。

图1 移动式区间交通量信息采集设备
1 移动式区间测速
区间测速系统如图2所示[5]:
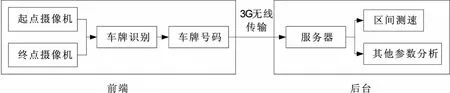
图2 区间测速系统
移动区间测速系统分为前端 (数据采集)和后台服务器两部分,两者通过网络进行数据的传输。
前端设备主要包括工控机和摄像机。摄像机不停地将拍摄到的图片传输至工控机,安装在工控机上的车牌识别软件对接收到的图片进行车牌识别,并将识别结果上传至服务器。
后台中心管理部分主要完成车辆的车牌对比、平均速度、标准偏差、车速波动计算和车速频率分布图、车速累积频率曲线图的形成以及对数据的综合应用等。
1.1 系统原理
在被测路段上设置监测区起始点A和结束点B(如图3所示),通过公路桩号或实际测量预先确定A点到B点的距离。A、B两点各放置一套移动式区间测速设备,用以检测、识别过往车辆,并将车辆通过A、B点的时刻、车牌识别结果通过3G无线网络发回控制中心。

图3 系统原理图
控制中心比对两点的识别结果,计算同一车辆由A点到B点的时间,设AB区间的距离为s,车辆经过A点的时刻为ta,经过B点的时刻为tb,通过这个区间的平均速度为v,那么:
1.2 前端设备
前端设备主要分为摄像机、工控机、3G无线模块及蓄电池。
摄像机:用于视频拍摄,采集车辆信息并传输给工控机;
工控机:接受从摄像机传输来的车辆信息,借助车牌识别系统对车牌进行识别并生成识别结果;
3G无线模块:主要功能为联系前端设备和后台系统,将车牌识别系统的识别结果传输至服务器;
蓄电池:负责为所有前端设备供电,其蓄电量能维持整套设备至少连续工作24h。
前端设备核心是“移动式”数据采集系统。此系统结合摄像机观测法,在前端通过视频拍摄(可移动)、车牌识别得到车牌信息,并将此信息传输到后台进行车辆数统计。此方法的优点在于弥补了人工观测法、浮动车法以及机械观测法等交通量调查方法的缺陷,而且只要确定好观测路段的起始及终点位置,就可对任意路况进行区间交通量统计。
处理子系统 (车牌识别)中的关键技术是采用了先进的车牌识别模型和支撑向量基、神经网络、自适应二值化、自适应灰度分割等算法,可以及时、准确地提供车辆特征信息 (车牌号码),以实现对区域内的车辆进行自动观测。此方法的优点在于借助车牌这一唯一标识的车辆信息,系统可以自动对区域内的所有车辆进行观测。而对依次通过起讫观测点的车辆 (区间测速的有效车辆),系统将有效的对其进行记录,并将结果上传至服务器。
1.3 后台系统
后台系统采用BS架构,用户可通过网络直接访问,登陆界面如下:
登录系统后可设置本次测速的具体信息,如:路线编号、观测地点、起点、终点、天气等。
数据存储采用流行的关系型数据库,使用微软的SQL Server 2008,数据库架构采用内层、概念层和外层的设计方法,具有高效快速、尽可能小的冗余和安全性特点,建立适当的索引关键字段 (Key Field),满足了海量数据快速查找的要求。其区间车速计算过程如图5所示。
根据系统架构,数据库系统外层主要由用户管理认证、观测点档案和车牌抓拍记录三个项目组成。
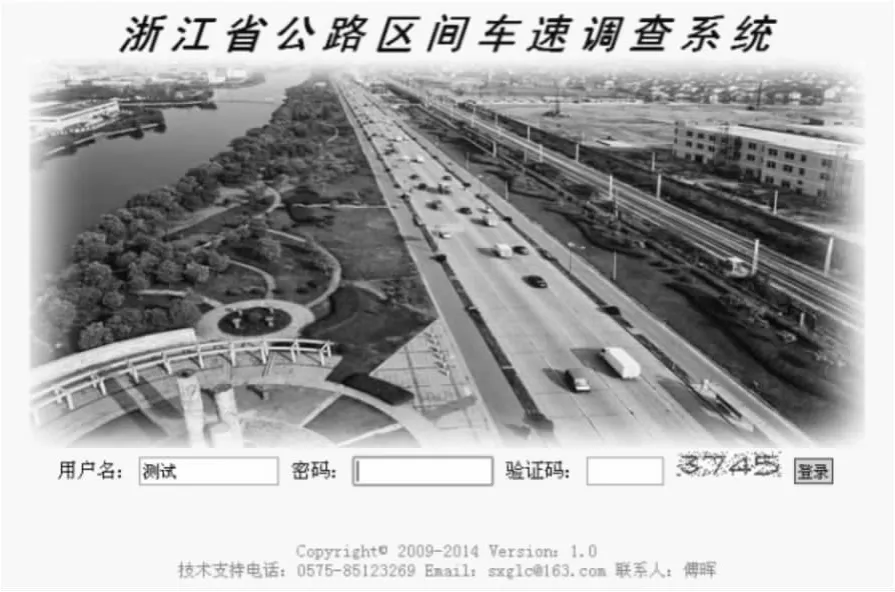
图4 后台系统
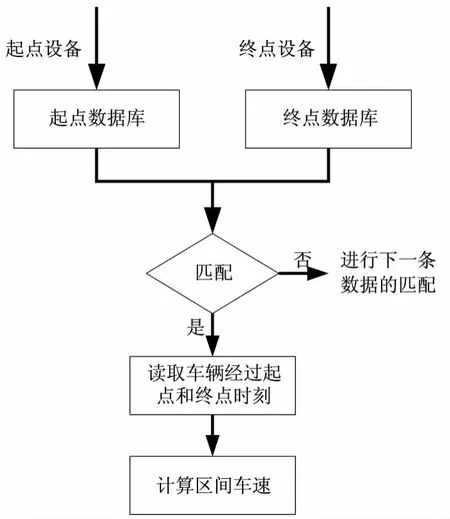
图5 区间车速计算过程
用户管理认证内层分为单位、用户两个数据库。
观测点档案记录一个数据库。
车牌抓拍记录和运算内层分为车速和频数两个数据库,同时根据情况,由程序判断生成观测记录和运算临时库,在观测结束计算完成后删除无用数据和临时数据。
2 实验
设备研发完成后,在杭州、绍兴的多条道路上进行了测试,具体测试情况见表1。
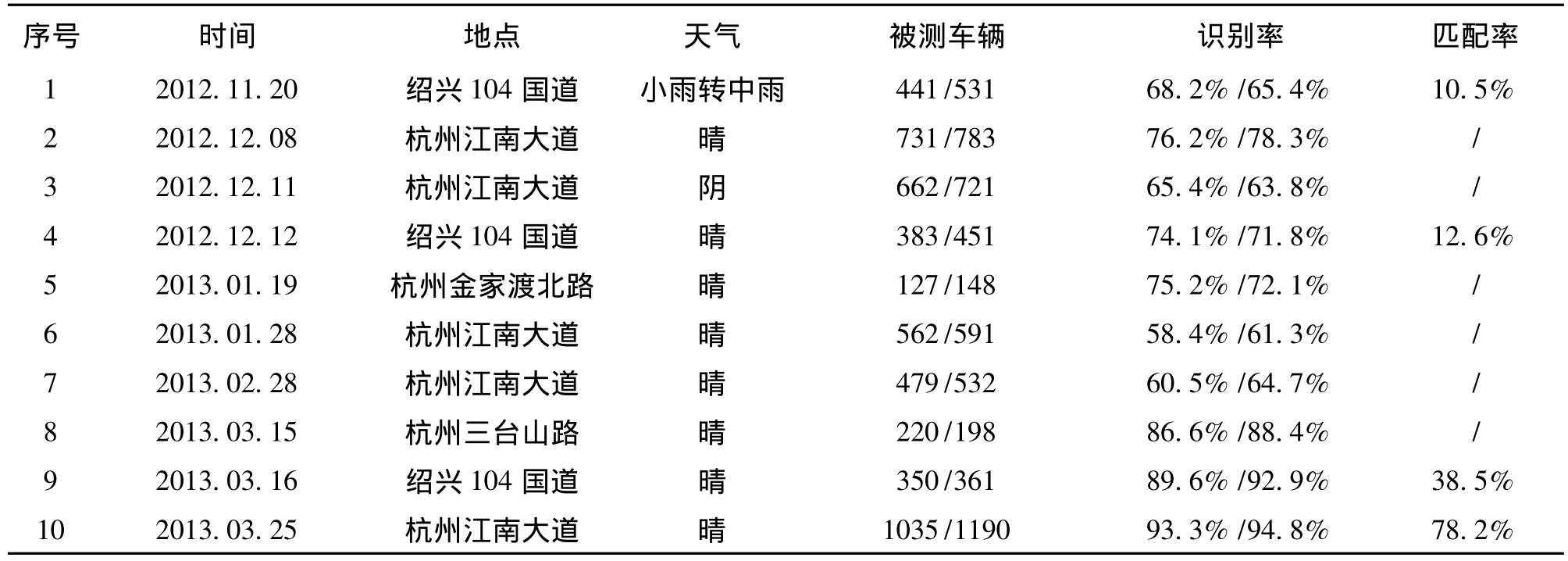
表1 区间测速实测数据
如上表所示,针对测试中遇到的问题现做如下说明:
从纸面参数来看,D500的光学取景器拥有更大的放大倍率。但我们发现X-H1的取景器看起来更“宽广”,这让我们意识到光学取景器和电子取景器在对比放大倍率时会有一定的偏差,更多要从实际观感出发而不是单看数据。在光学取景器和电子取景器孰优孰劣的问题上,我们继续保持“见仁见智”的态度,鉴于使用场景和习惯的不同,有些用户喜欢不耗电且与目视效果更为接近的光学取景器,而另一部分用户追求丰富显示参数,拥有“所见即所得”性质的电子取景器。
(1)从实际应用情况来看,本设备的识别率不可能达到100%,主要原因有:A、设备的软、硬件本身不可能在任何情况下都能对车牌进行正确的识别。本设备由蓄电池供电,综合考虑设备的续航能力和识别率,并没有选择性能最优的CPU和主板。B、实际道路都以多车道 (单向双车道或以上)为主,因此行驶在远侧车道上车辆的车牌有可能被行驶在近侧车道上的车辆所遮盖,导致设备未能发现此车辆。C、某些车牌污损比较严重,导致设备做出错误的识别。
(2)从历次测试中发现,阴雨天气光线太暗,会在一定程度上影像设备的抓拍、识别率;天气晴朗又会造成反光问题;所以设备最佳工作天气条件为多云或阴天。
(3)对单向三车道的道路,设备对行驶在离其最远车道上的车辆抓拍、识别率都不高。一方面是因为行驶在较远车道上车辆的牌照容易被其他车辆遮住;另一方面是因为拍摄角度过大,图片清晰度不够,此外还有可能导致图像分割不精确 (如图6车辆为浙AT4872的车牌被识别为粤TA1481)。
(4)10次测试中1、4、9、10这四次进行了联机测试,前三次测试 (都在绍兴104国道、单向双车道)的匹配率都不理想。除去设备本身的问题,客观上也存在一定问题:阴雨天光线不好,影响设备的抓拍、识别率,天气晴朗又受反光的影响;两台设备距离较远 (10kM),道路又不封闭、岔路口多,客观上导致许多车辆只经过测试路段的起点或终点。第10次的测试 (在江南大道、单向三车道)情况为:两台设备相距100m,道路封闭性较好,天气晴朗有一定的反光。此外单向三车道的路况也在一定程度上影响了匹配率。

图6 车牌识别结果
(5)第6、7两次的识别率过低是由于摄像机出现故障,所拍摄的图片清晰度不够。经返厂维修,问题已经解决。
(6)当初设计时考虑到功耗问题,硬件(CPU、主板、内存)的选择上偏于保守,后续设备对硬件进行升级后性能将会更好。
3 结语
本系统的功能、技术水平能够满足区间测速的实际应用要求,可以取代传统的人工计数的方式,更有效、更准确的进行区间测速。跟传统区间测速方式相比主要由以下优点:
(1)目前区间车速的获取主要靠人工,单次数据采集需要记录50辆有效车辆。以104国道绍兴段为例,针对5公里的区间进行人工数据采集,需花费两个小时左右。而采用本设备在同一路段一个小时能采集300辆有效车辆的数据。
(2)实现移动式区间测速,可对任意路段进行区间测速。设备由蓄电池供电、通过3G无线网络与后台连接,因此受外界约束条件少,使得设备能够适应各种不同的道路环境。
(3)车牌识别过程在前段完成,数据传输的对象只是识别结果 (字符),因此数据传输量少,能够保证数据及时、不间断的传输。
(4)本系统在车牌识别过程中能够识别车牌的颜色 (主要为黄色和蓝色),因此我们能从中得到大、小车的比例。不同车辆对路面质量要求不同,因此,此数据可为道路管养部门的工作提供参考。如果系统能够跟交警的车牌数据库对接,则可对车型进行精确区分。
[1]陆化普,史其信.智能运输系统研究发展动向与启示[J].科技导报,1996,(10):54-57.
[2]邵晓明.公路交通情况调查系统研究[D].长春:吉林大学,2007.
[3]关勇.物联网行业发展分析[D].北京:北京邮电大学,2010.
[4]李卫平.智能交通技术应用[M].北京:人民交通出版社,2006.
[5]冯晋光,姜虹.软件系统分析概述[J].中国科技信息,2006,(5):108.
