定向Ad Hoc网络中邻居发现与跟踪技术研究
2013-09-17王中武
王 莹, 王中武, 莫 娴
(①海军司令部信息化部,北京 100841;②中国电子科技集团第30研究所,四川 成都 610041)
0 引言
最近几年,采用高增益的定向链路实现 ad hoc组网引起了强烈的关注。收、发两端都使用定向天线能提供更长的传输距离和更高的数据率。通过将能量的发射与探测限定到指定的方向,能够大大减小无用方向上的信号干扰,提高抗干扰能力。定向传输和接收提供的高增益使得较远节点之间也能够通信,从而减小了网络直径。此外,由于可以调度多个节点之间的链路对同时进行定向的传输,故可增加空间上的重用效率[1]。因此,采用定向传输的移动自组织网络能够在网络服务质量、吞吐量、抗敌方人为干扰和探测等方面获得较大的性能提升,其程度取决于天线、收发器以及所采用MAC算法的能力。
在采用定向天线的无线ad hoc网络的MAC控制算法方面,相关研究工作都假设在算法的某个阶段采用了全向接收。但是,全向接收使得该协议面对人为干扰很脆弱,而且全向天线与定向天线的增益不匹配,极大影响了网络性能的改善程度;现有的邻居发现算法,包括随机扫描探测算法、穷举扫描方法以及令牌遍历扇区扫描算法[2-3],发现邻居时间可能很长或不是确定的值。此外,在拓扑动态变化的移动自组织网络中,节点的移动和信道质量的变化给链路跟踪带来极大的难题。因此,开发完全采用定向传输/接收的快速邻居发现与跟踪算法是一个极具挑战的问题。文中基于已有的技术基础,描述一种完全基于定向波束传输的快速邻居发现算法与持续跟踪链路方向的控制方法,试图解决该问题。
文中结构安排如下。首先描述 MAC帧结构设计与假设条件,然后描述一种完全采用定向传输/接收的、具有确定发现时间的快速邻居发现方法,最后描述了移动节点应用数字光纤罗盘、北斗接收机等辅助导航系统模块实现动态跟踪定向链路波束方向的方法。
1 MAC帧结构与假设
在完全定向传输自组织网络中,若采用基于时分多址访问(TDMA)的MAC机制,则网络节点能够结合TDMA每帧的时隙和链路的传输/接收方向,以协作的方式实现邻居链路上带宽资源分配和调度。
将时间分割为连续的帧,且将每个帧分割为 3个子帧[4]。如图 1所示,第一个探测子帧专门用于邻居探测,即发现新的邻居节点、节点离开等。第二个预约子帧用于两个节点重新确认它们在邻居发现过程中探测到的连接,并且进行数据通信预约。第三个数据传输子帧用于实际的数据传输。每个子帧分割为多个时隙。
在邻居探测/预约期内的每个子帧由多个时隙构成。为了进行功率量级协商和预约确认,需要进行一次 3-步/2步握手过程。邻居探测(发现)所使用的 3-步消息与预约所使用的2-步消息的内容各不相同。为了易于实现,这两种情况使用相同的消息格式(邻居发现和时隙预约)。后者的消息长度可能大于前者的消息长度。每个时隙能够容纳下邻居发现和预约所使用的3-步握手消息。假设第一个子帧包含n(n=3)个扫描时隙,第二个子帧包含r(r=2)个预约时隙。第三个子帧具有M个数据传输时隙(见图1)。
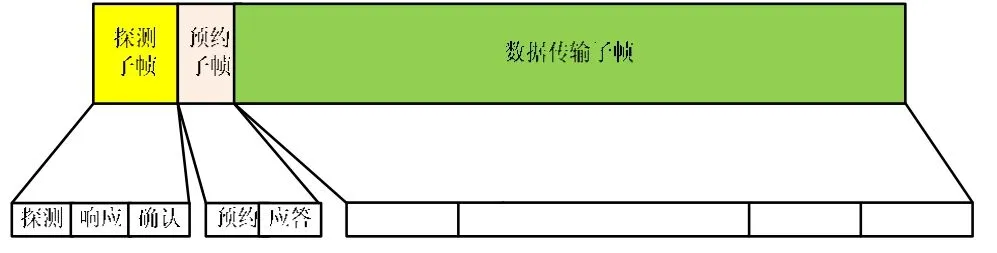
图1 TDMA帧结构
假设每个节点装备了一套收发器与一套波束指向可控(由选取的阵元方向确定)的天线。所有的节点都是时钟同步的(通过北斗或其它方法)。每个节点都具有以下能力:
通信为半双工,但每个节点能够在传输与接收模式之间快速地切换。
每个节点能够形成任意ω<π弧度宽度的传输或接收单波束。因而,每个节点具有定向传输与接收的能力。
每个节点的定向天单元线采取相同的阵元编号顺序,各节点阵元天线预先都经过精确的初始安装方向校对,使各节点指向正东的阵元编号都相同。
所有节点的当前时刻都是 TDMA帧同步的(通过北斗或其它自组织TDMA同步方法[5])。
每个节点都安装有北斗接收机、测速仪、数字方向仪、数字光纤陀螺模块,能够根据采集的实时运动参数通过运算确定自己的地理位置、运动姿态(俯仰角、横滚角)以及朝向。
2 邻居发现
邻居发现过程在图 1所示的第一个子帧内进行[3]。为了使每个节点都快速发现潜在定向邻居,采用一种确定性的探测扫描邻居发现算法。该算法的前提,是每个节点基于数字指北仪、数字陀螺,应用导航计算软件实时确定自己的俯仰、横滚姿态与方向,在任何时刻都知道自己的哪一个天线阵元指向正东、哪一个天线阵元指向正南、哪一个天线阵元指向正西、哪一个天线阵元指向正北。
在进行邻居发现探测扫描时,所有处于探测扫描模式的节点,无论其姿态和朝向如何,都以平行的波束轴向向相同的方向发射;而所有处于侦听模式的节点,无论其姿态和朝向如何,都以平行的波束轴向在相反的方向侦听。
2.1 扫描寻找邻居
为便于叙述,假设一对具有定向天线的节点,只要连接它们的直线在一个节点的当前传输波束内并且在另一个节点的当前接收波束内,就能够直接进行通信。因而,这两个节点必须同时将它们的波束相互指向对方,并且必须处于传输与接收互补的模式(即一个在发送时,另一个必须在接收)。在一个战术网络中,其通信可能发生在3维空间中。不仅在地面与空中节点之间将会进行通信,而且位于不同海拔高度的地面节点之间以及在不同高度飞行的空中节点之间也会进行通信。为了便于形式描述这种情况,设(θ’,φ’)和(θ’,φ’)分别为两个节点传输与接收方向。对于窄波束天线,这两个节点之间的通信需要将这两个波束指向相反的方向,并且处于传输与接收互补的模式,即:

邻居发现的关键思想,是执行符合约束条件(1)的搜索过程。一次扫描为达到整个搜索空间的一次最小覆盖的一个序列(天线指向的若干方向和若干模式),由多个尖帽状空间相交形成整个半球形的搜索空间,每个波束以其指向方向为中心的宽度为ω。在每次扫描中,各节点遵循预定的顺序,但传输与接收极性相反。当进行扫描时,节点在每个指定的方向上都传输一个通告。当进行侦听时,节点等待邻近节点的通告到来。如果一个侦听节点收到一个通告,则定向地响应它自己的通告,并且期待再接收一个确认,这些步骤都是在一个很短的时间间隔内进行。这种3-步握手的每个部分,都可以交换传输功率量级信息和提取方向信息。
2.2 模式选择
一个节点通过对方向序列的单次扫描,有可能探测到它的所有潜在邻居,但通常需要经过多次扫描才能发现它们[1]。网络中所有节点要发现它们的所有潜在邻居所需要的扫描次数下限和上限,取决于形成的网络拓扑、节点每次扫描中用来选择其扫描或侦听模式的算法。文中介绍一种确定性的模式选择算法。每个节点的初始化参数为 N 和 j,这里 j∈{0,1,…,N-1}(为其独一无二的标识),且N为网络中的最大节点数。每个节点的ID(即j)以二进制形式编码。如果其位数小于,则在其左边添加 0直到位为止。例如,如果N=16并且j=3,则其二进制形式为0011。对于一个扫描周期内的第次扫描,如果第位为0则选择侦听模式,如果为1则选择扫描(即主动探测)模式。因此,在第一次扫描期间,一个节点有机会探测到它在网络内的一半邻居(若它们在其可达范围内)。很容易证明,任何两个节点的二进制编码内都至少含有一个不同的数字bit(位),这又意味着这两个节点只要在相互的可达范围内,最多经过次扫描就能互相探测到对方。
2.3 3步握手机制
本节叙述一种 3-步握手的算法,包括邻居发现过程中每个节点采取的行动以及两个节点(每个指向位置方向上的节点1和节点2)之间的消息交换。其消息内容与具体的握手算法相关。
握手步骤 1:为使发现其传输覆盖范围内任何潜在邻居的机会最大化,节点1以收发器的最大传输功率量级传输邻居探测消息,向潜在的邻居们通告它自己的存在。
握手步骤 2:节点 2侦听一次传输。如果什么也没有接收到,则放弃这次握手。否则,如果节点2成功地接收到节点 1的邻居探测消息,则知道了节点1的存在,并且它可以向节点1传输一个应答消息通告它自己的存在。
握手步骤3:节点1侦听一个返回的应答消息。如果没有收到,节点1放弃本次握手。否则,若节点1成功接收到节点2的应答消息,它则知道节点2存在,节点1则继续进行握手操作,并向节点2响应。
节点2侦听节点1的响应。如果没有接收到,节点2则认为节点1不同意建立一个连接。否则,如果节点2成功接收到节点1的响应,它则知道节点1认可建立邻居关系。
3 执行时隙预约
在邻居探测阶段中,两个节点已探测到相互的存在,它们还需要确认该连接并进行链路带宽分配预约。预约请求与确认将在图1所示的第二个子帧内执行,在预约子时隙中,节点1将开始一个2-步握手的过程。
节点1将向节点2发出一个预约请求消息,指出可用于预约的空闲时隙与期望的时隙数量。
在接收到节点1的预约请求消息后,节点2计算出两个节点共同的空闲时隙的一个集合。如果共同的空闲时隙的数量小于所要求的数量,则不能作出任何预约,但这两个节点保留它们最后相互联系的方向,可以在随后的那些帧内的下一个约定的子时隙内继续进行预约。如果两个节点的可用共同空闲时隙数等于(或大于)节点1需要的时隙数,节点2则以预约的公共空闲时隙,向节点1应答一个预约响应消息。如果两个节点的可用共同空闲时隙数小于节点 1需要的时隙数,则节点1应答一个预约不成功消息。
当接收到预约响应消息,则链路带宽资源预约成功,就可以开始在该定向链路上传输数据业务了。
4 邻居发现探测扫描的参数选取
设一帧的长度为80 ms,前5 ms用于邻居发现探测扫描和定向链路时隙预约,后75 ms包含15个5 ms宽度的数据时隙。采用由37个喇叭阵元构成的半球形定向波束天线,每个波束的宽度为30º。
在扫描和预约子帧内,考虑波束切换时间、保护时间以及消息长度,完成 3-步握手的每个子时隙长度设置为1 ms,完成预约子时隙长度设置为1 ms。那么每帧有3 ms专用于邻居发现,每帧有另外2 ms专用于预约。其总开销大约为6%。对于30º的波束宽度,需要 37个波束来完成一次完整的半球形扫描。如果N=64,对于采用确定性扫描算法的情形,它将需要(37×6)×0.1=17.76 s的时间来完成一次完整的扫描(探测完半球型空间内的所有方向)。
5 链路方向跟踪
由于车载或无人机(UAV)等移动载体时刻处于运动状态,节点的横滚、俯仰和方位角的变化会造成已建立的定向链路的方向指向产生偏离[6],需要基于周期的测量数据和运算、在每个TDMA帧内实时确定定向链路传输与接收应该采用的最合适的天线阵元。
每个节点根据周期地(如1 s)从数字指北仪、数字光纤陀螺仪以及北斗读取的位置、方向、速度、偏转数据,利用北斗接收机测出载体所在地理经度和纬度,利用载体上的惯性导航系统测出载体的姿态参数(包括载体相对正北方向的航向角、载体相对水平面的横滚角和俯仰角),根据定向链路邻居在前一个TDMA帧内报告的北斗位置经度和纬度,通过计算确定最合适天线阵元,然后在邻居表中记录该链路的阵元方向矢量,驱动天线实现对邻居的跟踪传输与接收。
6 结语
文中针对采用定向波束天线的无线 ad hoc网络,结合TDMA帧结构的时隙设计,介绍了一种完全采用定向传输/接收的快速邻居发现与定向链路方向跟踪算法。在给出的例子中,有大约6%的开销用于邻居发现和预约,用于预约和发现新节点所花费的时间较为合理,所描述的方法在因抗干扰需求下全向天线不能使用或不符合要求时是很有用的。最后,需要特别指出,若在定向自组织网络中融合频谱动态认知技术与业务流优化控制技术[7-8],则可以大大提高定向空分网络的抗干扰能力并进一步提高带宽资源的利用率。
[1] GELAL E,JAKLLARI G,KRISHNAMURTHY S V, et al, An Integrated Scheme for Fully-Directional Neighbor Discovery and Topology Management in Mobile Ad hoc Networks[C]. Canada: IEEE Mobile Ad Hoc and Sensor Systems, 2006:139-149.
[2] KHATIBI S,DEHGHAN M,POORMINA M.Quoram-based Pure directional Neighbor discovery in Self-organized ad hoc Networks[C]. Tehran: IEEE Telecommunications,2010:476-481.
[3] MURAWSKI R,FELEMBAN E,EKICI E, et al.Neighbor Discovery in Wireless Networks with Sectored Antennas[J].IEEE Ad Hoc Networks, 2012,1(10):1-18.
[4] ZHANG Zhensheng.Pure Directional Transmission and Reception Algorithms in Wireless Ad Hoc Networks with Directional Antennas[C]. USA:IEEE Communications,2005:3386-3390.
[5] 刘庆刚,李大双,朱家成.多跳TDMA组网同步的分布式控制方法[J].通信技术,2012,45(05):26-28.
[6] ZHANG Zhensheng, RYU B,NALLAMOTHU G, et al.Performance of All-Directional Transmission and Reception Algorithmsin Wireless Ad Hoc Networks with Directional Antennas[C]. USA: IEEE Military Communications, 2005:225-230..
[7] 梁燕芬,殷瑞祥.认知无线电技术[J].信息安全与通信保密,2007 (03):121-124.
[8] 杨凌,张晓帆,诸恺,等.多跳对基于802.11的Ad Hoc网络 TCP流公平性的影响[J].通信技术,2008,41(10):100-102.
