基于ADAMS和MATLAB的空气悬架系统仿真与试验研究
2013-09-04詹长书
徐 宁 詹长书
(东北林业大学)
1 空气悬架系统动力学仿真模型
1.1 空气弹簧特性试验
空气弹簧特性试验主要包括静态特性和动态特性试验。本文用到的动态特性是在正弦激励条件下测得的力和位移曲线,经处理后可得动态刚度特性曲线[1,2]。将空气弹簧固定在自行研制的振动试验台上,通过安装的位移、气压和拉压力传感器测量所需数据。
试验使用的空气弹簧是E7074型膜式空气弹簧,试验台可沿直线导轨做垂直运动。按照空气弹簧特性试验的国家标准 《汽车悬架用空气弹簧实验方法》(GB/T13061-1991)进行试验,得到 E7074 型空气弹簧在标准工作高度为400 mm,内部气压分别为0.3 MPa、0.4 MPa和0.5 MPa时的动态特性曲线如图1所示。
1.2 ADAMS/View中空气弹簧模型
选择在标准工作高度时弹簧内部气压为0.4 MPa的动态特性曲线作为仿真参考数据,将该曲线通过均方差值在0.5以下的四次方拟合函数拟合得到力和位移关系式[3],再经求导后得到动态刚度特性曲线。ADAMS/View中默认垂直向上为正方向、弹簧压缩行程位移为负方向,与以往的定义正好相反。将数据导入到ADAMS/View中生成多义线SPLINE_2,即得到如图2所示空气弹簧模型特性曲线。
1.3 ADAMS/View中空气悬架模型
将复杂的空气悬架振动系统简化为一个弹簧阻尼系统,排除横摆振动、侧倾振动及其他一些干扰振动,只研究垂直方向的振动,空气悬架简化模型.JHsus08以某货车参数为参考对象,以弹簧阻尼器代替轮胎。表1为某货车悬架质量参数、减振器参数和轮胎特性参数。本文主要研究可通过冲、放气来改变自身特性从而优化悬架性能的半主动空气悬架,为了方便仿真与分析,将可冲、放气的空气弹簧简化为一个被动空气弹簧和一个作动器,即在悬架模型中用一个力来代替由控制器调节电磁阀使空气弹簧进行冲、放气所增加或减少的那部分弹力,该力的值从控制器模型输出到ADAMS的悬架模型中,力的表达式为
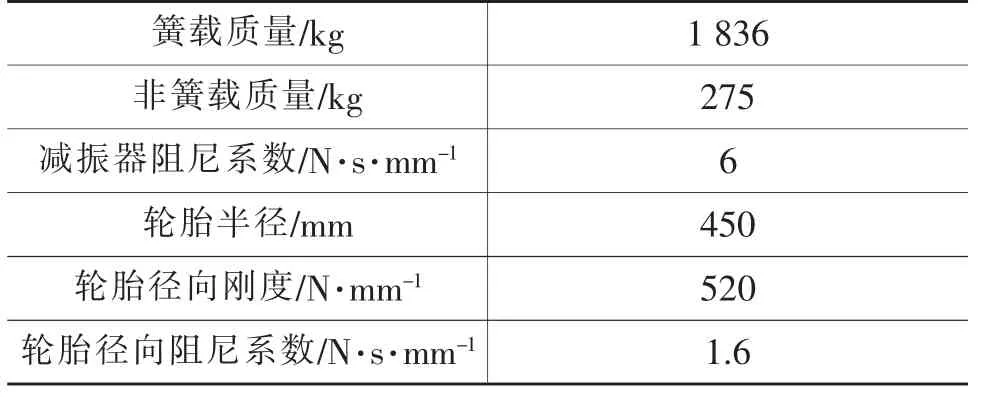
表1 2自由度1/4某货车悬架模型参数
2 综合控制器设计
为了利用更多悬架状态反馈信号,更加智能的改善悬架性能,本文设计了一种综合控制器。该综合控制器将对车身加速度进行直接控制的PID控制器和对悬架动行程进行直接控制的位置全状态反馈控制器相结合,提高了悬架整体性能。
2.1 PID控制器设计
PID控制原理是根据偏差变化调节控制量,偏差增大,控制量也增大,这是比例环节的作用;由于偏差一直存在,将其累加起来,加大控制量以消除偏差,这是积分环节的作用;微分环节起到预估作用,避免偏差振荡[4,5]。本文采用传统的PID控制器直接对车身加速度反馈偏差进行控制,在Simulink环境中建立半主动空气悬架的PID控制器模型。
2.2 位置全状态反馈控制器设计
位置全状态反馈控制器直接对悬架动行程的反馈偏差进行控制,主要由位置回路、速度回路和加速度回路组成。控制器将根据位置传感器传来的信号与给定值求得的偏差来调节被控量,偏差增大控制量也增大;速度负反馈校正在提高系统固有频率的同时也降低了系统的增益和阻尼;加速度负反馈校正可以在保证稳定性的前提下提高系统阻尼。因此,通过调整外部位置回路增益系数Ke、速度负反馈系数Kfv和加速度负反馈系数Kfa,可取得较好的控制效果。
位置全状态反馈控制规律为:
式中,u(t)为控制器控制量;e(t)为反馈偏差;Ke为位置回路增益系数;Kfv为速度反馈系数;Kfa为加速度反馈系数。
2.3 综合控制器模型
将PID控制器与位置全状态反馈控制器连接起来,给每个控制器一个增益系数Gain1和Gain2,通过调节增益系数和控制器内部参数,改善空气悬架系统性能。综合控制器模型如图3所示,其中,kp、ki、kd分别为PID控制器的比例、积分和微分系数;k1为传感器放大系数,此处为1;k2、k3、k4分别为位置全状态反馈控制器的位置回路增益系数、速度反馈系数和加速度反馈系数;Gain1和Gain2是2个控制器的分配系数。
3 联合仿真和结果分析
首先在ADAMS中建立5个系统状态变量,通过ADAMS/Controls模块的接口定义控制力kzl和路面lm为输入变量,车身加速度a、轮胎动载荷lt和悬架动行程xj为输出变量。定义输入输出变量后,在MATLAB中激活ADAMS子程序,将控制器模型、路面模型与ADAMS子模块相连接[6,7],进行联合仿真。联合仿真时间为6 s,仿真相对误差为0.001,联合仿真模型如图4所示。
联合仿真中增益系数Gain1和Gain2时既不能消耗太多能量又要根据实际需要。两者全为0时是被动控制,某一个为0时是单独的PID控制或位置全状态反馈控制,都不为0时是综合控制。综合控制时对控制效果的调节主要取决于2个增益的比值和大小,在0~1之间时,优化百分比会大致按比例缩小,都为1时控制效果较好,但此时能耗也比增益在0~1之间时要高,增益系数越大,能耗越高且控制效果不规律,因此应尽量采用较小的增益系数以获得较好的控制效果。表2给出了增益系数Gain1和Gain2在几个典型数值上的悬架性能指标均方根值。

表2 空气悬架性能指标均方根值
图5~图7是Gain1和Gain2分别为1.6和1.1时的仿真结果对比,与被动控制相比,本文采用的综合控制器将车身垂直加速度和悬架动行程均方根值显著降低,改善了悬架性能。
4 结束语
经过对空气弹簧弹性特性的试验研究,在ADAMS中建立了2自由度1/4某货车空气悬架模型,在MATLAB环境下设计了一种综合控制器,通过联合仿真对随机激励下的空气悬架模型进行了半主动综合控制。研究结果表明,综合控制器能够有效改善汽车行驶平顺性,并可根据实际情况通过增益系数的调节得到需要的控制效果。
1 李仲兴,李美,牛光,周孔亢.半主动悬架空气弹簧的动态特性研究.汽车工程,2010,32(3):244~247.
2 郑明军,王海花,王渊.空气弹簧弹性特性理论分析与实验研究.噪声与振动控制,2009(3):43~46.
3 陈燎,周孔亢,李仲兴.空气弹簧动态特性拟合及空气悬架变刚度计算分析.机械工程学报,2010,46(4):93~98.
4 Alf Isaksson, Tore Hgglund, Editorial.PID Control.IEE Proc Control Theory, 2002,149(1):12~14.
5 宋宇.空气悬架车辆ADAMS与MATLAB联合仿真研究.汽车技术,2008 (10):40~43.
6 J R.Capitani, G.Masi, A.Meneghin, D.Rosti.Handling analysis of a two-wheeled vehicle using MSC.ADAMS/motorcycle.Vehicle System Dynamics, 2006,44(1):698~707.
7 Jinzhi Feng, Songlin Zheng, Fan Yu.Bandwidth-limited active suspension controller for an off-road vehicle based on co-simulation technology.Frontiers of Mechanical.Translated from Journal of Shanghai Jiao Tong University,2006,40(6):952~957.
8 贾涛,张淑敏.基于虚拟样机技术的空气悬架客车平顺性仿真研究.汽车技术,2005(11):8~11.
