基于纵向安全距离的超车安全预警模型*
2013-08-16华南理工大学土木与交通学院广东广州510640中国科学院新疆理化技术研究所新疆维吾尔自治区乌鲁木齐830011
(1.华南理工大学土木与交通学院,广东广州510640;2.中国科学院新疆理化技术研究所,新疆维吾尔自治区乌鲁木齐830011)
游峰1 张荣辉2† 王海玮1 温惠英1 徐建闽1
超车是驾驶员最为常见的驾驶行为之一.据统计,在高速公路上驾驶员以90 km/h行驶100 km的距离,途中将进行大约50次超车行为.在自由流状态的高速公路上,超车行为更为频繁[1].实施超车时,驾驶员必须根据当前的车速、车辆间距、车流状态以及道路交通设施等周边环境信息,实时调整驾驶策略实现超车行为.该过程包括超车环境信息收集与处理、超车时机判断、超车轨迹生成、超车碰撞检测、超车冲突处理和超车行为实施等.在如此复杂的过程中,驾驶员极可能误判超车的可能性和可行性,从而使车辆处在潜在的碰撞危险之中.研究发现,避免超车过程引发的车辆碰撞可通过控制车辆间的相对速度和增加车辆纵向间距来实现,如此将有效减少车辆超车过程发生碰撞的概率,但势必大幅降低道路的通行能力.
近年来,我国因超车不当引发的交通事故呈明显上升趋势,尤其是在高速公路上,60%以上的交通事故都与超车有关[2].如何提高超车安全已成为亟待解决的交通安全问题.
目前国内外有关超车的研究成果主要集中在超车过程的换道阶段.国外学者提出 GIPPS[3]、MITSIM[4]、SITRAS[5]和 CORISM 等[6]经典换道模型.国内学者也针对换道方面展开了相关研究,如王军雷等[7]分析了换道时车辆的运动状态,探讨了避免发生碰撞的条件,计算了不发生碰撞的安全距离.王荣本等[8]使用最小安全距离作为安全换道的指标,研究车辆碰撞的条件,并给出了换道最小安全距离的计算方法.徐慧智等[9]构建了车道变换行为期望运行轨迹,应用基于缓和曲线的轨迹形式,分析了安全距离对运行速度和车辆侧向加速度的影响.许伦辉等[10]研究了换道车辆完成换道的跟驰安全性,以提高道路的使用效率.李玮等[11]以四段式车道变换理论为基础,提出了车辆自由换道轨迹函数,建立了高速公路车辆自由换道模型.王永明等[12]等应用元胞自动机探讨了弹性的换道间距.邹智军等[13]将车道变换分为强制性和任意性车道变换,建立发车道变换意图、车道变换可行性分析以及实施行为的模型.陈斌[14]引入多智能体理论,建立基于多智能体主体系统的车道变换模型框架.笔者也曾研究了理想情况下换道车辆的防碰撞条件,并以此为基础研究了车辆的安全换道轨迹[15].上述研究工作为超车安全的研究奠定了基础,但大都基于传统的安全距离模型,研究主要集中在换道需求分析和简化换道间距检测上,研究成果过于保守.
为此,在前人研究工作的基础上,笔者针对超车安全的预警方法和超车过程中车辆安全间距展开研究.首先,分析超车安全的影响因素;然后,分析超车时车辆碰撞的4种类型,包含车辆追尾碰撞、车辆斜向碰撞、车辆横向刮擦以及车辆偏离车道与道路设施发生的碰撞;进而建立超车的场景,以此为基础,给出超车时间段以及超车车辆各个关键角点的定义;再通过分析车辆间的纵向安全距离,结合车辆的运动学模型,兼顾车辆间车头时距,构建了超车过程中车辆碰撞的预警模型;最后,针对车辆以匀速和以特定加速度超车时安全区域与非安全区域的判定进行了仿真演算.
1 影响车辆超车安全的因素分析
实施超车时,驾驶员必须根据当前的车辆速度、车辆相对距离、当前车流状态以及道路交通状况等交通运行环境信息,实时调整驾驶策略,实现超车行为.因此,分析与超车有关的安全影响因素可为文中研究的开展奠定基础.安全影响因素见表1.

表1 影响超车安全的因素Table 1 Influencing factors of overtaking process
2 超车安全预警分析
2.1 预备知识
2.1.1 超车碰撞类型
为便于展开超车安全的分析,将超车过程中车辆发生的碰撞分为4类:车辆追尾碰撞、车辆斜向碰撞、车辆横向刮擦以及车辆偏离车道与道路设施发生的碰撞,如图1所示.

图1 超车碰撞类型Fig.1 Collision classes in overtaking process
2.1.2 车辆超车场景的建模
为便于展开超车过程研究,文中建立典型的超车环境模型.如图2所示,图中Vo为超越车辆,即实施超车行为,以某一特定的横向加速度从当前车道实施超车行为到达相邻车道.Vf1,Vr1分别为与Vo同车道的前、后车辆,Vf2、Vr2分别为与Vo相邻车道的前、后车辆.xOy为世界坐标系统,x轴为道路水平方向(即为纵向),y轴为x轴的法线方向.x轴和y轴的正向如图中所示.设 ¨xj、¨yj、˙xj、˙yj、xj、yj分别表示j车的纵向加速度、横向加速度、纵向速度、横向速度、纵向位移、横向位移.下标j代表不同位置的车辆,j∈{Vo,Vf1,Vr1,Vf2,Vr2}.

图2 典型超车场景图Fig.2 Model of typical overtaking scenario
2.1.3 超车时间片定义
文中将超车过程所需时间进行分段处理,如图3所示.每个时间段的定义见表2.

图3 超车时间段分割图Fig.3 Definition of time segment for overtaking

表2 超车时间段的定义表Table 2 Definition of time segmented for overtaking
2.1.4 超车车辆关键角点的定义
如图4所示,文中选取超越车辆Vo的4个角点,即左前角点、左后角点、右后角点、右前角点,分别为 pi(i=1,2,3,4).

图4 超车关键角点的定义Fig.4 Definition of key corner points in overtaking process
设Vo车左前角点位置为yVop1,根据各个角点间的几何关系,其他3个角点均可由式(1)-(3)求出.

式中,lVo、wVo、θ分别为Vo车的长度、宽度和方向角.
2.2 超车车辆的运动学建模
如图5所示,以Vo车左前点p1为参考点,Vo车完成超车时所对应的横向位移为Wlane,即为车道宽度.当Vo车到达 Wlane/2时,其横向加速度达最大值,然后逐步减小;当车辆到达相邻车道时,横向加速度变为0.
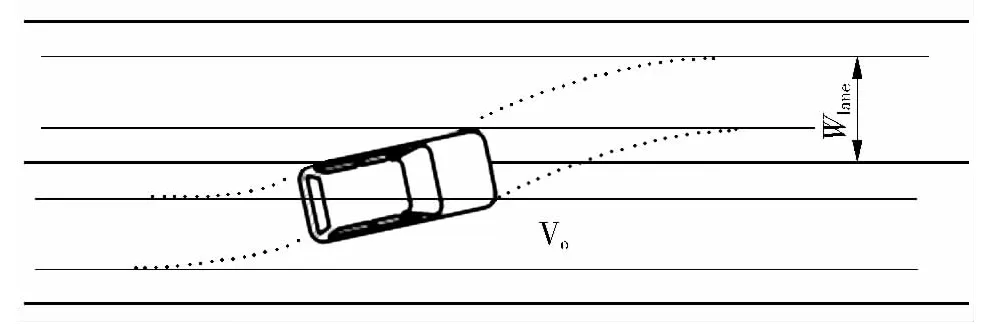
图5 超车过程车辆运动学分析Fig.5 Kinetic analysis of vehicles in overtaking process
假定Vo车实施平稳超车,设Vo车横向速度和p1点的横向位移分别为 ˙yVo、yVo.文中借鉴文献[16]提出的方法来描述 ˙yVo、yVo,如式(4)和(5)所示.
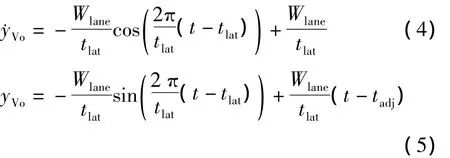
Vo车对应的方向角θ(t)为
如图2所示,当 Vo车超车时,与车辆 Vf1、Vf2、Vr1和Vr2均可能发生碰撞.为有效避免Vo车碰撞事故的发生,必须考虑超车场景中车辆间的纵向距离和横向距离.鉴于超车过程的复杂性,同时受文章篇幅所限,重点研究Vo车与Vf1车(与Vo车在同一车道的前方车辆)在超车过程的运动状态,以期建立超车车辆的动态模型.
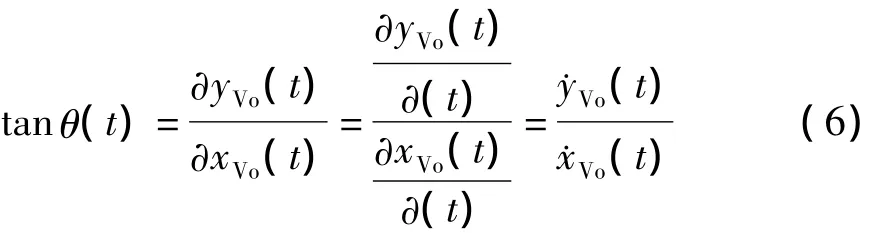
如图6所示,设BL线为Vf1车的左侧边界线.Vo车在t=0时刻开始实施超车行为,Vo车以横向加速超车前车速的调整时间为为tadj.Vo车和Vf1车发生碰撞的类型为车辆斜向碰撞或车辆追尾碰撞.假定Vf1车在原车道上保持匀速行驶,即满足条件¨xf1=0∩¨yf1=0.当 Vo车以一定横向加速度穿越 BL线时,Vo车右前角点p4极易与Vf1车发生碰撞.Vo车经过时间tc+tadj后,Vo车p4点刚好经过BL线,并与之交于pc点,定义 tc+tadj为 Vo车到达碰撞点的时间.
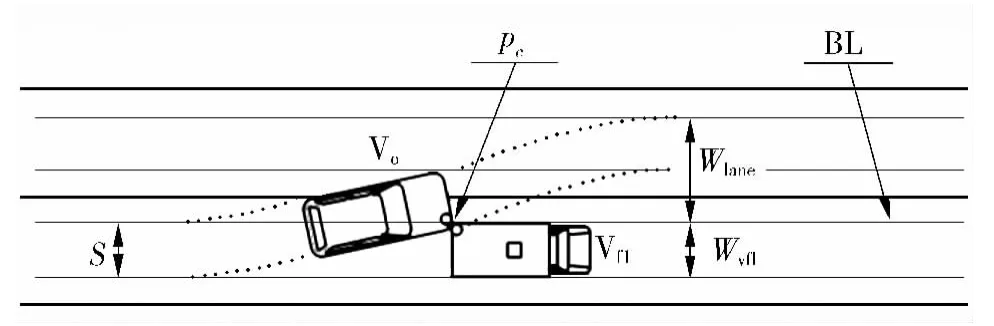
图6 本车与前车的安全距离Fig.6 Safety spacing between host and front vehicle
当t<tadj时,如果Vo车仍未实施超车行为,易与前车 Vf1发生追尾碰撞;当在 tadj<t<tc+tadj时,如果Vo车实施超车行为,易与前车Vf1发生斜向碰撞.结合式(3),当t=tc+tadj时,Vo车右前角点p4的横向位移为

根据式(6),上式可改写为

分析此情况下车辆间的运动关系,Vo车与Vf1车的安全预警条件为

式中,t∈[0,tc+tadj],lf1为 Vf1车的长度,它是关于超车时间的函数.
式(9)中的最后一项wVosin(θ(t))的引入能确保整个超车过程中Vo车的右前角点与Vf1车的车尾不发生任何形式的碰撞.鉴于θ(t)和sin θ(t)取得最大值时对应的时间段为t=tc+tadj,使lL1=lVo+max(sinθ(t)),式(9)可简化成

令

当 t∈[0,tc+tadj]时,只要确保 Sr(t)>0,Vo车与 Vf1车就不会发生任何形式的碰撞[17],即

上式中Sr(0)=xf1(0)-lf1-xVo(0).由此看出,Vo
车与Vf1车不发生碰撞的Sr(0)的最小值即为两车不发生任何碰撞的最小安全距离minS:

分析上式可知,Vo车与Vf1车的最小安全距离minS的主要影响因素由相同车道内两车间的纵向加速度、相对初速度和超车时间tc+tadj构成.而tc+tadj决定了实施换道车辆的横向位置yf1、横向位移时间tlat和调整时间tadj.
在实际行车过程中,超车车辆一般以较小的相对速度跟随前车行驶,通过上述影响因素求解出的安全距离与实际超车过程存在较大误差.事实上,为了保证超车安全,除考虑上述原因外,还应考虑车间的相对时距.文中给出了基于车头时距的安全跟踪模型,其表达式为

式中:c为车头时距,c取1~2 s;D0为安全停车距离.通过以上分析可知,为满足安全跟随距离,超车的安全跟随距离如式(15)所示,当车辆间间距小于该值时,Vo车发出预警信息.

3 模型求解
如图6所示,Vo车实施超车行为,Vf1始终在当前车道上向前匀速行驶,即˙xf1=0.文中对两种情况进行仿真分析:Vo车维持车辆纵向速度不变,即˙xVo=0,Vo车以特定的加速度进行超车.正常超车情况下,车辆维持较高车速,因此车辆的方向角不应太大,有关文献[18-20]建议取 5°为宜.
3.1 Vo车以恒速超车的情况
由式(12)可知,Vo车和Vf1车不发生碰撞的条件可简化为

则

此时Vo车和Vf1车的相对速度为常数,式(12)简化为

式(18)描述匀速行驶情况下Vo车超车过程中与Vf1车的安全的纵向超车距离.其中tlat为超车平稳性的动态特征参数:tlat越小,超车过程完成时间越短,车辆运行状态越不平稳,易发生侧滑甚至侧翻;tlat越大,超车完成时间越长,超车轨迹平缓,但由于超车车辆长时间跨线行驶,易发生刮擦或角碰.
超车完成时间 T=50s,tadj=0,Wlane1=3.5m,超车时间约为5 s[21-22].图7中描述了超车场景中 Vo车与Vf1在纵向相对速度与纵向相对间距之间的关系.当车辆间的运动参数朝箭头相反方向变化,并超越安全临界线时,按前述分析,即可认为Vo车实施不安全超车行为,预警信号触发.
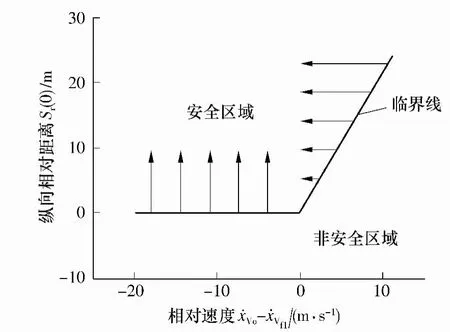
图7 恒速条件下Vo车与Vf1车辆的碰撞区域Fig.7 Collision regions between Voand Vf1under the condition of constant velocity
3.2 Vo车以特定加速度超车的情况
Vo车实施超车时,如与Vf1车纵向间距过小或相对速度偏大,驾驶员出于安全考虑,调整Vo车的运动状态,即先减速再加速以实现超车.文中参考梯形加速度 a控制策略[23-24],如图8所示.其中 aM、aadj分别为超车的最大加速度和调整加速度.

图8 超车梯形加速度控制策略图Fig.8 Trapezoidal acceleration model of overtaking
设 Vf1车恒速向前行驶,即 ¨xVf1=0.设 Vo车在tlong时刻达到相邻车道,对应的速度为˙xo(tlong).此时Vo车的纵向加速度可以表达为

按前述的分析,Vo车通过碰撞点后将不发生任何形式的碰撞.通常情况下,tc<tlong,结合式(12)和图8所示的加速度控制策略,Vo车与Vf1不发生碰撞的条件为

将式(19)代入式(20)整理,有

对应的临界安全车距为

设(˙xo(tlong)- ˙xf1)∈[-20,20]m/s,Vo车与 Vf1车的临界安全车距如图9所示.Vo车超车完成后的车速˙x(tlong)与Vf1车相对速度越小,安全距离区域范围就越大.与前面讨论相同,当车辆间的运动参数朝箭头相反方向变化,并超越安全临界线时,认为Vo车实施不安全超车行为,预警信号触发.
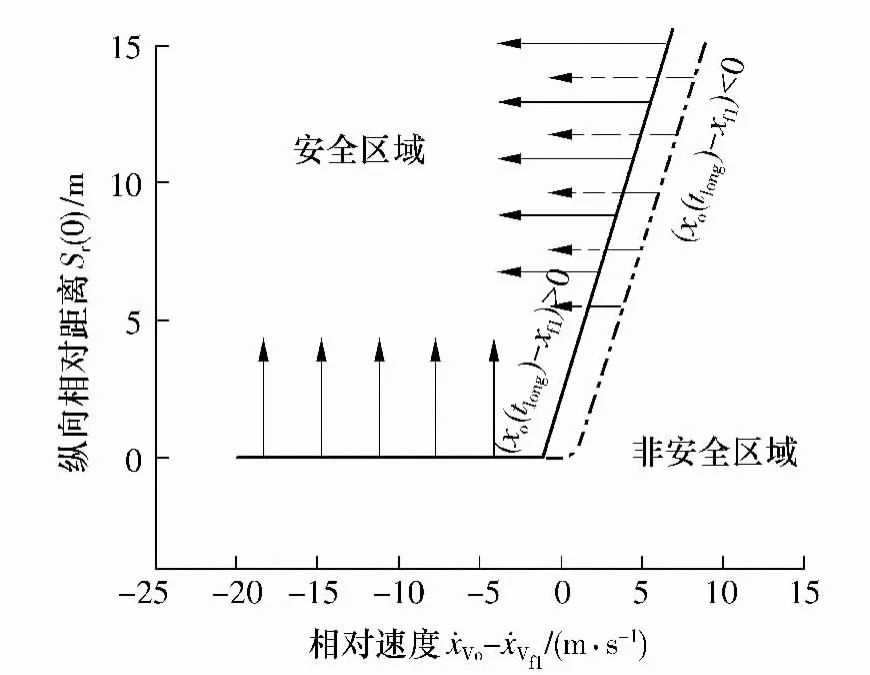
图9 加速条件下Vo车与Vf1车的安全距离区域Fig.9 Safety spacing regions between Voand Vf1under the condition of specific acceleration
4 结语
驾驶员在超车过程中,需根据车速、车辆间距、车流状态以及道路交通设施等周边环境信息,实时调整驾驶策略实现超车行为,在短暂的时间内完成如此复杂的驾驶行为,驾驶员极可能产生误判,最终使车辆处在潜在的碰撞危险之中.为此,文中提出了确保安全超车的预警算法.首先分析了车辆超车安全的影响因素;然后对超车的碰撞形式进行分类,并建立车辆超车的场景;进而建立纵向安全距离的模型;同时考虑车辆间车头时距,提出超车过程中车辆碰撞的预警方法;最后对算法进行仿真验证.文中超车碰撞的预警算法以临界安全距离为基础,兼顾驾驶员主观特性,有较强的理论基础和工程实践价值,为汽车主动安全系统的研发和超车事故的预防奠定了基础.
[1]Lamm R,Beck A,Ruscher T,et al.How to make two-lane rural roads safer-scientific background and guide for practical application [J].Transportation Research Board,2006,3(31):104-108.
[2]Kretschmer M,Neubeck J,Wiedemann J.Combining vehicle dynamics control and decision making procedures towards safe overtaking maneuvers[J].SAE Technical Paper Series,2005,7(12):408-412.
[3]Gipps P.A model for the structure of lane-changing decisions[J].Transportation Research Part B:Methodological,1986,20(1):403-414.
[4]Ahmed K I.Modeling drivers’ acceleration and lane changing behavior[D].Massachusetts:Massachusetts In-stitute of Technology,1999.
[5]Hidas P.Modelling lane changing and merging in microscopic traffic simulation [J].Transportation Research Part C:Emerging Technologies,2002,10(1):351-371.
[6]Ratrout N T,Rahman S M.A comparative analysis of currently used microscopic and macroscopic traffic simulation software[J].The Arabian Journal for Science and Engineering,2009,34(1):121-133.
[7]王军雷,李百川,应世杰.车道变换碰撞预警分析及最小纵向安全距离模型的研究[J].人类工效学,2004:189-194.Wang Jun-lei,Li Bai-chuan,Ying Shi-jie.Study on collision avoidance analysis for lane changing and minimum longitudinal safety spacing model[J].Chinese Journal of Ergonomics,2004:189-194.
[8]王荣本,游峰,崔高健.车辆安全换道分析[J].吉林大学学报:工学版,2005,35(2):179-182.Wang Rong-ben,You Feng,Cui Gao-jian.Analysis on lane-changing safety of vehicle[J].Journal of Jilin University:Engineering and Technology Edition,2005,35(2):179-182.
[9]徐慧智,裴玉龙,程国柱.基于期望运行轨迹的车道变换行为安全性分析[J].中国安全科学学报,2010,20(2):90-95.Xu Hui-zhi,Pei Yu-long,Cheng Guo-zhu.Study on the safety of lane-changing based on virtual desire trajectory[J].China Safety Science Journal,2010,20(2):90-95.
[10]许伦辉,倪艳明,罗强.基于最小安全距离的车辆换道模型研究[J].广西师范大学学报:自然科学版,2011,29(4):1-6.Xu Lun-hui,Ni Yan-ming,Luo Qiang.Lane-changing model based on minimum safety distance[J].Journal of Guangxi Normal University:Natural Science Edition,2011,29(4):1-6.
[11]李玮,高德芝,段建民.智能车辆自由换道模型研究[J].公路交通科技,2010,27(2):119-123.Li Wei,Gao De-zhi,Duan Jian-min.Research on lane change model for intelligent vehicles[J].Journal of Highway and Transportation Research and Development,2010,27(2):119-123.
[12]王永明,周磊山,吕永波.基于弹性安全换道间距的元胞自动机交通流模型[J].系统仿真学报,2008,29(2):1159-1162.Wang Yong-ming,Zhou Lei-shan,Lü Yong-bo.Cellular automaton traffic flow model considering flexible safe space for lane-changing [J].Journal of System Simulation,2008,29(2):1159-1162.
[13]邹智军,杨东援.微观交通仿真中的车道变换模型[J].中国公路学报,2002,15(1):77-83.Zou Zhi-jun,Yang Dong-yuan.Lane changing model for micro traffic simulation [J].China Journal of Highway and Transport,2002,15(1):77-83.
[14]陈斌.基于多智能主体系统的车道变换模型[J].中国公路学报,2005,18(2):104-108.Chen Bin.Lane-changing model based on multi-agent system [J].China Journal of Highway and Transport,2005,18(2):104-108.
[15]游峰.智能车辆自动换道与自动超车控制方法的研究[D].长春:吉林大学交通学院,2005.
[16]Chee W,Tomizuka M.Lane change maneuver of automobiles for the intelligent vehicle and highway system(IVHS)[J].1994,1(3):3586-3587.
[17]Pham H,Hedrick K,Tomizuka M.Combined lateral and longitudinal control of vehicles for IVHS [J].1994,1(2):1205-1206.
[18]Ngai D C K,Yung N H C.Automated vehicle overtaking based on a multiple-goal reinforcement learning framework[J].IEEE on Intelligent Transportation Systems Conference,2007,1(1):818-823.
[19]Naranjo J E,Gonz Lez C,Garc A R,et al.Lane-change fuzzy control in autonomous vehicles for the overtaking maneuver[J].IEEE Transactions on Intelligent Transportation Systems,2008,9(2):438-450.
[20]Naranjo J E,Sotelo M A,Gonzalez C,et al.Using fuzzy logic in automated vehicle control[J].Intelligent Systems,2007,22(2):36-45.
[21]Svenson A L,Gawron V J,Brown T.Safety evaluation of lane change collision avoidance systems using the national advanced driving simulator[J].19th International Technical Conference on the Enhanced Safety of Vehicles,2005,1(2):87-96.
[22]Diaz A J,Ros Vidal E,Rotter A,et al.lane-change decision aid system based on motion-driven vehicle tracking[J].IEEE Transactions on Vehicular Technology,2008,57(4):2736-2746.
[23]Tomar R,Verma S.Neural network based lane change trajectory prediction in autonomous vehicles[J].Transactions on Computational ScienceⅩⅢ,2011,6750(12):125-146.
[24]Schakel W J,Knoop V L,Van Arem B.LMRS:an integrated lane change model with relaxation and synchronization[J].Transportation Research Part B,2011,15(2):105-124.
