基于双转子电机的电动汽车操纵稳定性*
2013-08-16罗玉涛李红林小慰来恩铭
罗玉涛 李红 林小慰 来恩铭
(1.华南理工大学机械与汽车工程学院∥广东省汽车工程重点实验室,东广州510640 2.广州汽车集团乘用车有限公司,广东番禺511400)
汽车的操纵稳定性控制对于汽车的主动安全性有着重要的意义.车辆的操纵稳定性控制主要采用控制处于极限工况下汽车的运动,使得驾驶者仍然可以按照正常的驾驶方式顺利通过原本令人难以驾驭的危急状况.车辆操纵稳定性控制系统是由车辆电子控制单元(ECU)控制,采用闭环控制的算法来减轻车辆的过度或不足转向趋势,该系统能准确获得车辆横摆角速度的大小,并能够对车辆质心侧偏角或者质心侧偏角速度进行估算.目前国内外的操纵稳定性控制策略大多采用的是横摆力矩控制.
目前比较成熟的车辆稳定性控制系统主要有博世的电子稳定控制程序(ESP)等.博世的电子稳定控制程序系统是一个状态反馈控制器,状态变量为汽车的质心侧偏角与横摆角速度,状态控制器的输出为需求的横摆力矩[1].德国大陆公司提出一种可以区分不同驾驶工况的控制仲裁器,对车辆车轮制动力与发动机扭矩进行了相应的控制,并与防抱死制动系统ABS、牵引力控制系统TCS系统进行相应的协调控制[2].Mando公司则是基于理想横摆角速度和实际横摆角速度的偏差,采用比例-积分-微分(PID)控制算法估算车辆所需的横摆力矩[3].
双转子电机利用作用力和反作用力的原理,将传统电机的定子作为外转子,将原有的转子作为内转子,两者作反向运动.永磁体磁场与电枢绕组产生磁场相互作用,因此产生电磁转矩.目前双转子电机最广泛的应用领域是在混合动力系统和风力发电系统中.双转子电机与内燃机结合的驱动系统展现了更多的优点:驱动系统集驱动、差速、制动能量再生于一体,效率高、重量轻、成本低.
文中研究一种基于双转子电机直接驱动的电动汽车.该电动汽车前桥采用常规的机械驱动桥,后桥采用双转子电机通过左右行星齿轮直接驱动车轮,其同时可以实现两驱与四驱系统的任意切换.文中针对双转子电机的驱动特性,利用Vedyna软件建立双转子电机与整车操稳性的仿真模型.通过建立理想状态下的车辆模型,估算理想横摆角速度和质心侧偏角.根据相平面法设计车辆稳定性判断准则、模糊横摆力矩控制器输出需求的横摆力矩、滑移率控制器控制目标车轮的滑移率.并通过系统仿真验证了该控制策略的有效性.
1 车辆状态参数观测器的设计
状态观测器是根据系统的外部变量的实测得出状态变量估计值的一类动态系统.为了获取车辆状态和路面状况,常常使用状态估计的方法.
1.1 车速的识别
目前基于车辆的传感器进行纵向车速估算的方法主要有两种[4]:一种是基于轮速和车身加速度等基本测量信息的直接换算方法,另一种是基于模型间接估计的方法.其中利用基本测量信息直接换算方法是指通过轮速乘车轮的滚动半径获取车速[5-7]或者利用加速度信号与速度信号的积分关系[8]来估算车速.该算法比较简单,但是由于加速度信号都带有噪声,长时间的积分会导致结果严重偏离真实值.
文中通过测量汽车行驶的纵向加速度传感器信号和从动轮的轮速信号,建立了一种融合了从动轮轮速信号的卡尔曼滤波算法与加速度积分算法的车速观测器,建立了车速估算的状态方程与观测方程.当车轮未出现过度打滑或者抱死时,采用基于从动轮轮速信号的卡尔曼滤波算法;当车轮出现过度打滑时,则趋向为加速度积分算法.权值计算模块则根据比较车身纵向加速度与车轮轮边加速度的差值以及当前的滑移率确定两种算法之间的加权系数,从而确定最终的车速估算值.
1.2 质心侧偏角的识别
对于汽车稳定性控制系统而言,横摆角速度和质心侧偏角是判断汽车实际运行情况的两个重要参数[9-10].其中,车辆的横摆角速度可以通过横摆角速度传感器直接获得,而质心侧偏角则需要通过估算.车辆稳定性控制系统中,希望汽车在行驶过程中质心侧偏角尽可能小.由于车辆是一个非常复杂的系统,各种行驶环境都会影响汽车的行驶状态,使得质心侧偏角的估算需要兼顾多方面的考虑,因此质心侧偏角观测的准确性将是车辆稳定性控制系统的重点[11-13].
为了准确估算车辆行驶过程中的质心侧偏角,文中采用了一种基于二自由度汽车动力学的车辆质心侧偏角估算器.在质心侧偏角较小的情况下,轮胎的侧偏刚度处于线性区域,故可以采用基本车辆模型的卡尔曼滤波算法.当估算的质心侧偏角较大时,可切换为采用动力学积分算法,该估算器可以有效适应车辆运行状态的变化.
2 双转子电机驱动的电动汽车模型
车辆的动力学模型是操纵稳定性控制策略的基础.该双转子电机驱动的电动车辆模型包括了电机模型、车身模型等,如图1所示.
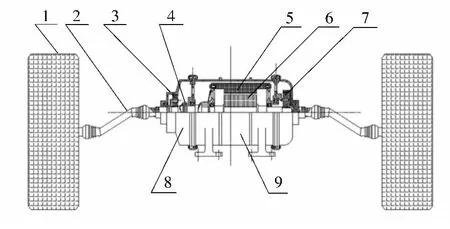
图1 永磁同步对转双转子电机驱动桥结构设计Fig.1 Design of ADBR drive axle’s structure
永磁同步双转子电机作为一种新型的电机,具有结构简单、体积小、损耗小、效率较高等优点.通过相应的坐标变换,在转子磁场定向的同步坐标系上对电机的磁场电流和转矩电流进行解耦控制,得到了该双转子电机的数学模型:
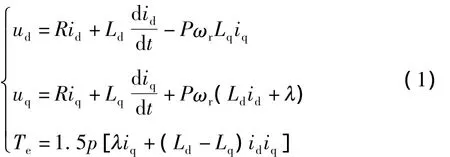
式中:ud,uq分别为交轴和直轴电压;id,iq分别为交轴和直轴电流;R为外转子相绕组电阻;Ld,Lq分别为交轴和直轴同步电感;P为电机磁极对数;为内转子永磁磁通;ωr为内外转子相对机械角速度;Te为电磁转矩.双转子电机转矩与转速控制方法类似于传统的永磁同步电机,但双转子电机所控制的转速为内外转子的相对转速,转矩为内外转子间转矩.
由图2可知,双转子电机的内外转子分别与减速和换向减速行星齿轮相连,可以简化为四质量模型.其中,ωI、ωo为内、外转子转速;ωwl为左轮及半轴转速;ωwr为右轮及半轴转速;TI、To为内、外转子负荷;Twl为左轮及半轴负荷;Twr为右轮及半轴负荷;JI、Jo为内、外转子转动惯量;Jwl为左轮及半轴转动惯量;Jwr为右轮及半轴转动惯量.外转子通过减速比Ip的行星齿轮与左侧车轮连接;内转子通过减速比Ip的换向减速行星齿轮和右侧车轮连接.将车轮以及传动系的转动惯量等效到内外转子上可以得到等式方程:
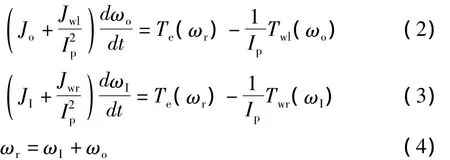
综合上述式子分析可得:


图2 四质量简化模型Fig.2 Illustration of four-mass model
对双转子电机的控制实质上是对相对转速的控制,而电机的两个转子的实际转速的和与相对转速可以建立关系.这就与传统的车辆上的差速器原理十分相似,因此该双转子电机同时具有差速器的作用.
3 操纵稳定性控制系统的设计
车辆稳定性控制系统主要是由电子控制单元、传感器、执行器等部件组成,用于在需求时产生相应的制动力和驱动力.文中的双转子电机驱动的电动汽车的操纵稳定性控制结构如图3所示,包括上层控制器和下层控制器.上层控制器主要包括理想模型的横摆角速度和质心侧偏角计算、车辆稳定性判断和模糊横摆力矩控制器,下层控制器主要包括控制车轮的选择和滑移率控制器.
3.1 理想横摆角速度和质心侧偏角计算
简化的线性二自由度车辆模型常被用于计算车辆的理想横摆角速度和质心侧偏角.通过联立二自由度汽车运动的微分方程可得:

图3 操纵稳定性控制结构图Fig.3 Structure of vehicle stability control system

综上所述,理想横摆角速度的最终值ωr_l应为两者最小值,即

同理可求得理想质心侧偏角βlixiang为

考虑到轮胎和地面之间的最大附着系数,可得:

车辆横摆力矩主要是由轮胎的纵向力和侧向力共同作用的直接结果,而质心侧偏角在一定程度上也会对横摆力矩产生较大的影响,横摆力矩的增益随着质心侧偏角的增大而减小,特别是在较大的质心侧偏角下会导致车辆出现过度转向等失稳状态.因此,通过确定车辆质心侧偏角的极限特征值βT对车辆进行控制,从而有效地将质心侧偏角控制在极限范围内.同时,为了保证高速时的行驶安全性,质心侧偏角的理想值应当随着车速的增大而降低,综上所述最终理想的质心侧偏角为

3.2 车辆的稳定性判断
横摆角速度和车辆的质心侧偏角是表征车辆行驶状态的重要参考量.当车辆稳定行驶时,车辆实际的横摆角速度、质心侧偏角相比于理想值偏差不大.当车辆发生失稳时,轮胎容易突破其线性区域而工作在非线性区域或者极限状态,此时车辆有可能发生较大的侧偏,车辆实际的横摆角速度和质心侧偏角与理想值相比偏差较大.因此,可以通过该偏差的大小来跟踪车辆的行驶状态,但是由于该偏差带较难确定,而只使用横摆角速度状态标量反馈控制时,质心侧偏角过大会使控制效果不够理想.因此,可以通过质心侧偏角及其变化率构成相平面来判断车辆的行驶状态,构造如下判断式:

若判断式成立,则认为此时车辆处于行驶稳定状态;若不成立,则认为此时车辆失去稳定性,需要控制系统的介入.文中 C1=4.4,C2=2.6,β 为质心侧偏角.
3.3 横摆力矩控制器的设计
当汽车处于转向的非线性区时,轮胎的侧向力比较大,接近饱和状态,此时轮胎纵向力将对侧向力产生很大的影响,两者的关系可以通过HSRI(Highway Safety Research Institute)轮胎模型确定.当车辆需要横摆力矩控制时,可以采用前轴单侧制动、后轴单侧制动与双转子电机驱动的控制方式.
通过实际的横摆角速度和质心侧偏角与驾驶员期望值的偏差e及其变化率˙e作为模糊控制器输入变量,输出补偿横摆力矩M,构成的模糊控制器结构如图4所示,模糊控制调整映射如图5所示.其中,ω为实际横摆角速度;βd为理想质心侧偏角;β为实际质心侧偏角;e为理想值与实际值的偏差;˙e为理想值与实际值偏差的变化率;E为横摆角速度或质心侧偏角偏差;EC为横摆角速度或质心侧偏角偏差变化率;U表示模糊规律;ΔM为车辆的横摆力矩.
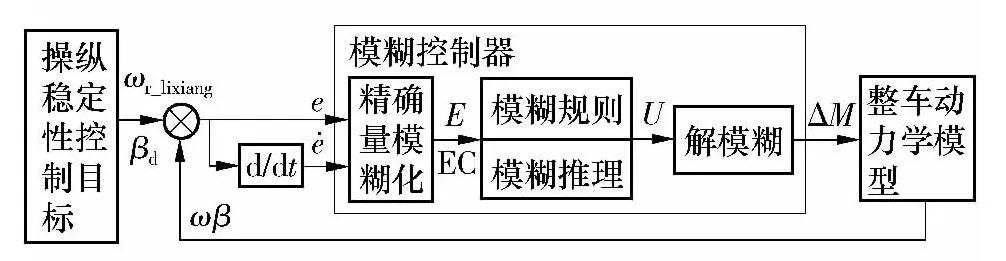
图4 模糊控制器结构Fig.4 Structure of fuzzy controller
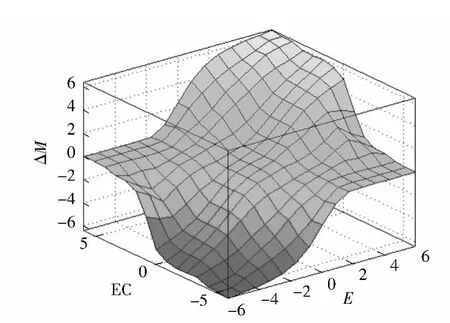
图5 模糊控制调整映射图Fig.5 Fuzzy control regulation map
3.4 控制车轮的选择
根据车辆的转向信息和横摆角速度,可以判断车辆属于过度转向或不足转向,从而控制相应的车轮.假设逆时针方向为正,顺时针方向为负,当车辆向左转弯,横摆角速度偏差即理想值与实际值的偏差小于零时,则认为过度转向,此时对车辆的右前轮进行紧急制动,产生顺时针的补偿横摆力矩;当车辆的横摆角速度偏差大于零时,则认为车辆转向不足,此时对车辆的左后轮进行紧急制动,对右后轮进行驱动,产生逆时针的横摆力矩,使得车辆按需求的方向行驶.同理,当车辆向右转弯时,则认为车辆的转向角小于零.若此时车辆的横摆角速度小于零,则认为车辆过度转向,对车辆的左前轮进行紧急制动;当横摆角速度偏差大于零时,则认为车辆处于不足转向,此时需要对车辆的右后轮进行紧急制动,同时增大后轴的双转子电机的驱动力矩,使左后轮产生驱动力,整车产生了顺时针方向的补偿力矩,最终控制车辆保持稳定.
3.5 目标滑移率的控制
滑移率控制器估算出目标车轮的滑移率.因此,制动系统需要对目标车轮滑移率进行有效控制,达到所需求的横摆力矩[14-16].
文中分别采用PID控制、模糊控制和模糊PID控制对滑移率进行控制,并比较其控制性能.PID控制器采用滑移率偏差作为输入,输出为车轮的制动力和双转子电机驱动力.模糊控制器采用滑移率的偏差及其变化率作为输入变量,制动与驱动力矩作为输出变量.
模糊PID控制器以滑移率的偏差和偏差变化率作为输入,利用模糊控制规则在线对PID的3个控制参数进行整定.
4 仿真计算与结果分析
为了验证操纵稳定性控制系统的控制效果,在Vedyna软件中建立了该车辆的仿真模型,集成了车身、电机、制动系统等模块.该车辆的相关仿真参数如表1所示.

表1 车辆仿真参数Table 1 Simulation parameters of vehicle
利用该仿真平台进行车辆的双移线工况仿真.假设工况1为车辆的行驶速度为80km/h,路面的附着系数为0.4,质心侧偏角和横摆角速度的仿真结果如图6、图7所示.
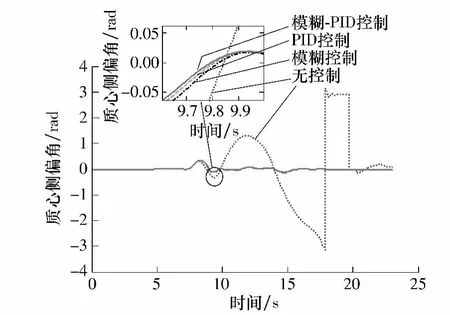
图6 质心侧偏角对比图(工况1)Fig.6 Side-slip angle comparison chart(Condition 1)
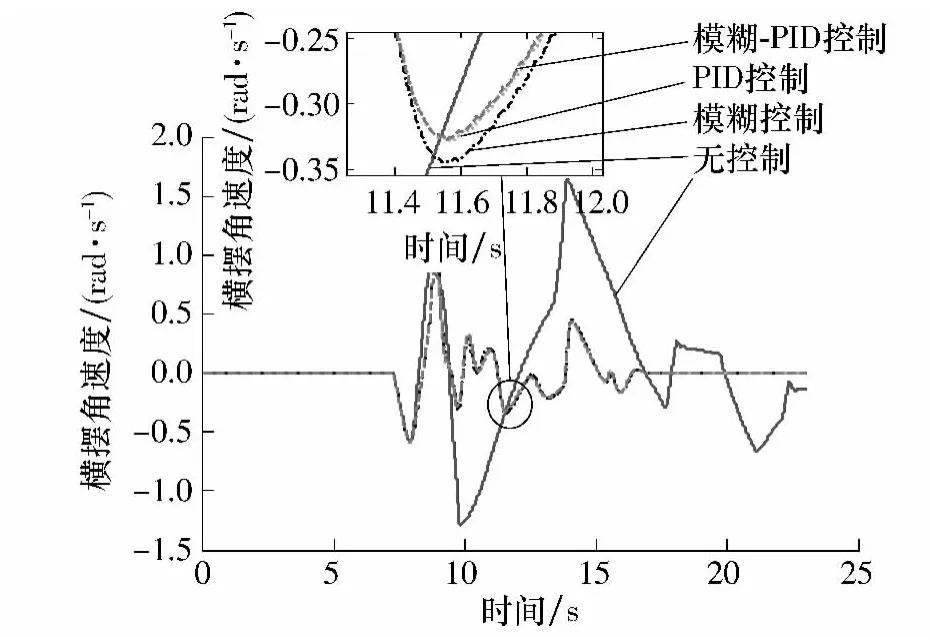
图7 横摆角速度对比图(工况1)Fig.7 Yaw rate comparison chart(Condition 1)
对比有、无该操纵稳定性控制系统的曲线图可以看出,在低附着路面上行驶时,有、无该操纵稳定性控制系统对车辆的稳定性影响较大.无控制的车辆在行驶过程中发生了严重的失稳,质心侧偏角产生了较大的变化,且失稳时车辆的横摆角速度也有较大的波动.对比采用了滑移率PID控制器、滑移率模糊控制器和滑移率模糊PID控制器的车辆,均能有效地抑制车辆失稳,其中滑移率的模糊PID控制器略好于其他两种控制器.因此,当车辆在较低附着系数的路面行驶时,稳定性控制系统可以有效抑制车辆的失稳,使得车辆的质心侧偏角和横摆角速度控制在合理的范围内.
假设工况2为路面的附着系数为0.4,车速为60km/h,利用该车型模型进行蛇形绕桩仿真.滑移率控制分别采用PID控制器、模糊控制器和模糊PID控制器,质心侧偏角、横摆角速度变化曲线如图8和图9所示.对比有、无该控制系统的质心侧偏角和横摆角速度,分析可知,当车辆在连续过弯时,该控制系统的作用非常明显,当车辆无该控制系统时,车辆的质心侧偏角逐渐增大,在20 s时发生了较大的波动,车辆失去控制.而增加了该控制系统的车辆在制动力和双转子电机的驱动力的共同作用下,车辆保持行驶的稳定性,有效地抑制了车辆的质心侧偏角和横摆角速度的增大.

图8 质心侧偏角对比图(工况2)Fig.8 Side-slip angle comparison chart(Condition 2)
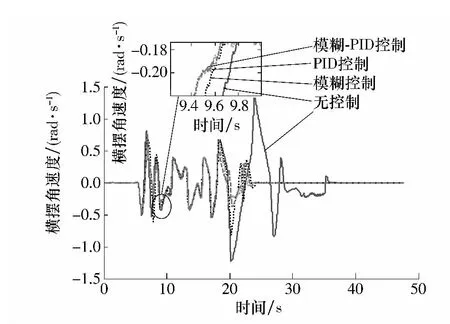
图9 横摆角速度对比图(工况2)Fig.9 Yaw rate comparison chart(Condition 2)
5 结论
文中详细介绍了车辆稳定性控制系统的基本原理,通过控制车轮的制动力和驱动力改变汽车的横摆力矩,从而实现对汽车的稳定性控制.根据理想状态下的参考模型计算出车辆在该转向情况下的理想横摆角速度和质心侧偏角.通过相平面法判断汽车的失稳状态,若车辆出现失稳,则由横摆力矩控制器计算需求的补偿力矩并估算所需控制车轮的目标滑移率,该信号被输送至制动系统与电机并执行控制,使得车辆处于稳定状态.最后对比该双转子电机驱动的电动汽车的运动仿真,结果表明该控制系统具有明显的控制效果,车辆的横摆角速度和质心侧偏角在失稳情况下均得到了有效控制.
[1]van Zanten A,Erhardt Rainer,Landesfeind Klaus,et al.VDC systems development and perspective [J].SAE Technical Paper,1998,2:35.
[2]陈帧福.ESC的工作原理与发展前景[R].法兰克福:德国大陆公司,2007.
[3]Kim Dongshin,Kim Kwangil,Lee Woogab,et al.Development of Mando ESP(Electronic Stability Program)[J].SAE Technical Paper,2003,1:0101.
[4]褚文博,李深,江青云,等.基于多信息融合的全轮独立电驱动车辆车速估计 [J].汽车工程,2011,33(11):962-966.Chu Wen-bo,Li Shen,Jiang Qing-yun.Speed estimation for all-wheel drive vehicles based on multi-information fusion [J].Automatic Engineering,2011,33(11):962-966.
[5]Daiss A,Kiencke U.Estimation of vehicle speed fuzzy-estimation in comparison with kalman filtering[C]∥Proceedings of the 4th Conference on Control Application.Albany:IEEE,1995:281-284.
[6]Kazuyuki Kobayashi,Ka C Cheok,Kajiro Watanabe.Estimation of absolute vehicle speed using fuzzy logic rule based kalman filter[C]∥Proceedings of the American Control Conference.Seattle:IEEE,1996:3086-3090.
[7]Mara Tanelli,Savaresi Sergio M,Carlo Cantoni.Longitudinal vehicle speed estimation for traction and braking control system[C]∥Proceedings of the International Conference onControlApplications.Munich:IEEE,2006:2790-2795.
[8]Kiencke U,Nielsen L.Automotive control system:for engine,driveline and vehicle[M].Berlin:Springer,2000.
[9]van Zanten A.Bosch ESP system:5 year of experience[J].SAE Technical Paper,2000,1:1633.
[10]Tseng H E,Madau D,Ashrafi B,et al.Technical challenges in the development of vehicle stability control system [J].IEEE,1999(2):1660-1666.
[11]Yoshiki Fukada.Slip-angle estimation for vehicle stability control[J].Vehicle System Dynamics,1999(32):375-388.
[12]Hideaki Sasaki,Takatoshi Nishimaki.A Side-slip angle estimation using neural network for a wheeled vehicle[J].SAE Technical Paper,2000,1:0695.
[13]Schofield B,Hagglund T.Optimal control allocation in vehicle dynamics control for rollover mitigation[C]∥Proc Amer Control Conf.Seattle:WA,2008:3231-3236.
[14]Cho W,Yoon J,Yim S,et al.Estimation of tire forces for application to vehicle stability control[J].IEEE Trans Veh Technol,2010,59(2):638-649.
[15]Rajamani R.Vehicle dynamics and control[M].New York:Springer-Verlag,2006:15-47.
[16]Buckholtz K R.Reference input wheel slip tracking using sliding mode control[C]∥Soc Automotive Eng.Detroit:[s.n.],2002:01-0301.
