运动影像测量方法的误差研究
2013-02-21严波涛郝卫亚
贾 谊,严波涛,郝卫亚
1.North University of China,Taiyuan 030051,China;2.Xi′an Physical Education University,Xi′an 710068,China;3.China Institute of Sport Science,Beijing 100061,China.
1 前言
运动影像测量方法是体育科研工作者了解人体动作技术规律的重要方法,其具有一定的广泛性和延续性,当我们将其作为量化分析的工具应用于科学研究时,则更应该重视其测量结果的可靠性。
纵观国内外相关领域的研究不难发现,运动影像测量方法的误差来源主要有系统误差和随机误差两大类。系统误差的大小与所使用的实验仪器、设备、测量环境以及测量方法有关。测量方案一旦确定,系统误差就是一个恒量。Li(1990)[23]和 Martin(1974)等人[24,25]认为,透视误差是平面拍摄的主要系统误差源之一,并提出了透视误差的修正公式;Sih[19]以及 Mont[26]等人,则利用非影像测 量 数据对透视误差进行了修正。平面定机拍摄的另外一种主要系统误差源是镜头畸变误差。Roger(2002)[29]、卢德明(2001)[8]以 及 郑 秀 媛 (2002)[17]等 人 ,都 曾 提 出 了 镜 头 畸变误差对测量结果的影响,但并没有对其进行进一步的量化分析。此外,运动场地不平和主光轴倾斜造成的成像误差也被认为是平面拍摄的系统误差来源[8,17],我国学者卢青(1984)[9]和 安 朝 臣 (1985)[1]曾 对 上 述 两 项 误 差 源 进 行了量化分析,并给出了修正公式。还有一些系统误差也会对测量结果产生影响,例如,标尺和标定框架的加工、磨损等因素带来的误差[8];图像分辨率误差和成像大小测定误差等[27]。表1对平面定机拍摄误差来源进行了归纳。
对于立体定机拍摄,可在一定程度上克服由于透视误差和场地不平等因素带来的影响。而立体定机拍摄的系统误差主要是在对物坐标进行重构时产生的重构误差。重构误差与摄像机的位置摆放、标定点的数量和分布[15]以及标定空间的范围[17]等因素相关。表2列出了一些研究者在不同测试条件下,对固定标志物测量得到的立体定机拍摄系统误差值。

表1 平面定机摄影摄像测量各项误差汇总情况一览表Table 1 Errors Collection of Two-Dimensional Imaging

表2 不同测试条件下的立体定机拍摄测量精度一览表Table 2 Precision of Three-Dimensional Imaging in Different Measurement Condition
运动影像测量中的随机误差则可能来自于电子器件的噪音、人体标志点不清晰[19]以及来自解析过程本身的误差[20]。其中,解析人员对人体关节点的判读误差被认为是主要的随机误差源[12,5]。有学者提出,不同解析员对关节点的判读误差可导致得到的数据之间没有可比性[28]。
综上所述,运动影像测量过程中的误差来源对测量结果影响较大,甚至会导致得到错误的研究结论。而目前关于此方面的研究又多集中于测量过程中的某个(些)环节,并不具有系统性,因此也就无法了解最后得到的测量结果中误差成分所占的比例究竟如何。本研究采用实验测试结合实例分析的方法,首先对测量过程中的主要误差源及误差范围进行测试,并在此基础上,以竞走项目比赛现场的视频资料为实例,以误差合成理论为依据,提出运动影像测量过程的误差合成计算方法,得到各误差源以及总的误差范围,使研究者对自己的研究结果做到心中有数。
2 研究方法
2.1 实验仪器
本研究中所使用的实验仪器包括:1)Pulinx TM-6710CL黑白循环扫描 CCD;2)AVENIR TV ZOOM LENS SL08551手动变焦镜头;3)Panasonic AG-DVC180MC常速摄像机;4)CASIO FH25高速摄像机;5)爱捷三维标定框架;6)自制测量用标志点;7)APAS录像解析软件;8)其他辅助材料,如钢卷尺、游标卡尺、标杆、胶布等。
2.2 拍摄方法及拍摄对象
本研究主要针对平面定机拍摄和立体定机拍摄方法进行研究。对静态已知长度标志点及标定框架等标志物进行拍摄。用于实例分析的技术录像拍摄于2011年太仓国际竞走挑战赛女子20km竞走项目的比赛现场,并对其中一名运动员的一个复步技术动作分别进行平面定机拍摄和立体定机拍摄。
2.3 数据处理与分析
所有的数据处理、数值运算以及统计学分析均在EXCEL软件和SPSS 13.0软件中完成,具体计算和统计方法将在结果与分析中分别进行说明。
3 实验结果
3.1 镜头畸变误差的测量结果
一旦拍摄方案确定下来,则表1中所列误差大小既已确定,但由于镜头畸变误差还和镜头的制造加工、镜头焦距等因素相关,需要进行专门的实验测试才能确定畸变量。因此,为能将镜头畸变误差项加入到最后的误差总合计算当中,本研究对三种不同的镜头进行了畸变量测试。镜头1为CASIO FH25高速摄像机自带普通长焦镜头;镜头2为日本产 AVENIR TV ZOOM LENS镜头;镜头3为PanasonicDVG180A常速摄像机自带LEICA DICOAR镜头(镜头参数如表3所示)。

表3 本研究测试用镜头参数一览表Table 3 Parameters of Measurement Lens
具体测试过程如下:在经过矫直的直线上每隔20cm设置一个标志点。本实验中采用的是人工标志点,黑白相间,大小为10cm×10cm×10cm(图1),标志醒目、清晰,便于量测和成像。用游标卡尺对标志点间距进行实测。用三种不同镜头分别对标志点进行定点定焦拍摄,摄像机镜头垂直于拍摄平面,机高设为1.2m。最后将视频用图形图像处理软件进行解析,并将解析结果与实测值进行比较。为使测试结果更加可靠,取10次解析的均值进行分析。

图1 本研究拍摄用标志点示意图Figure 1. Marker Point in Shooting
由图2可知,在画面中央3/5处,三种镜头的畸变误差值之间没有显著性差异,而在画面边缘2/5处AVENIR TV ZOOM LENS镜头的畸变误差明显小于其他两种。说明不同镜头在画面中央处都表现出比较稳定的性能,而在画面边缘处则差异较大。从三种镜头各段的误差均值及误差百分比结果来看,CASIO FH25镜头在边缘处的误差值较大,为19.9mm,误差百分比为4.1%。LEICA DICOAR镜头最小,为2.8%。
从理论上分析,越靠近画面边缘,畸变误差越大。而实验的结果也验证了这一规律。不论使用何种镜头,画面中央3/5范围内解析误差值都维持在较低水平(误差最大值为4.9mm)。这意味着在取景范围为5m的情况下,应尽量将人体图像控制在画面中间约3m范围内,这样可以保证误差百分比维持在0.2%~0.8%的较低水平上,而超出这一范围,则误差会明显增加。

图2 本研究三种镜头畸变误差比较图Figure 2. Comparison of Distortion Errors of Three Lens
3.2 立体定机拍摄的重构误差
本研究对动作技术分析中较为常用的爱捷辐射式标定框架进行重构误差测试。标定范围为2.5m3,标定点数量25个,呈辐射式均匀分布。采用两台CASIO FH25摄像机对标定框架进行拍摄。拍摄时,两摄像机位置保持左右对称,拍摄基线每增加1m,即对标定框架拍摄一次。基线长度由1m增至60m,共拍摄60次。拍摄现场如图3所示。

图3 本研究摄影基线误差实验现场拍摄示意图Figure 3. Error Testing Scene of Imaging Baseline
数据处理:使用Ariel图像解析软件,解析处理拍摄得到的60个立体像对。对标定框架上25个标定点坐标进行重构,为了尽量减小随机误差,对每个像对解析5次取平均值。将解析得到的标定点坐标与标定框架出厂时的原始坐标进行计算比较,得到X、Y、Z三个方向的误差值。

表4 本研究不同基线长度下标定框架三个轴方向的总体误差情况统计Table 4 Total Errors of Three Axis Directions in Different Imaging Baseline Length (mm)
表4是X、Y、Z三个方向的总体误差情况,从总体均值情况来看,Y方向(与拍摄基线垂直方向)的误差最大,平均为4.0mm;其次为X轴方向(与拍摄基线平行方向);Z轴方向(与地面垂直方向)的误差均值仅为1.8mm。在三个轴方向当中,Y方向的误差均值明显大于X轴和Z轴,且随拍摄基线增加而减小(如图4所示),说明Y方向测量精度受景深变化的影响较大。当摄像机主光轴夹角较小时,Y方向测量精度将明显降低,而X方向则表现出相反的趋势。另外,Z轴方向的误差值在基线长度增加时呈递增趋势(图4),可以认为拍摄距离是影响Z轴方向测量精度的主要因素。

图4 本研究不同基线长度对测量精度的影响示意图Figure 4. Influence for the Precision about Different Baseline Length
3.3 对各误差源进行误差合成
本节内容将以竞走项目为例,对平面定机拍摄和立体定机拍摄过程中的主要误差来源进行合成,给出不同拍摄条件下的误差范围。用于分析的视频资料拍摄于2011年江苏省太仓市举行的国际竞走挑战赛比赛现场。拍摄及解析参数如下:平面定机拍摄使用一台CASIO FH25摄像机,主光轴垂直于运动平面,摄距10m,机高1.2m,拍摄频率120Hz,图像分辨率640×480像素,拍摄范围5m,拍摄画幅数为53幅。使用APAS运动图像解析软件进行解析,使用AOCe950S19英寸显示器,水平方向固有像素值为1440;利用游标卡尺对电脑屏幕中标尺标志点所测距离为0.115m,比赛现场标志点间距为2.5m,成像比例为1∶21.7。
3.3.1 平面定机拍摄的误差合成
当测量结果中既含有系统误差成分,又含有随机误差成分时,我们通常用极限误差来表示测量后的总误差范围。根据误差合成理论[3],若测量过程中有s个未定单项系统误差和q个单项随机误差,他们总的极限误差为:

其中,Δi为某单项已定系统误差的极限误差;ai为误差传递系数;ei为某单项未定系统误差的极限误差;δi为某单项随机误差的极限误差;n为重复测量次数。在本例中,由于操作仪器固定,因此已定系统误差可以认为是由图像分辨率误差和成像大小测定误差构成:

另外,由于拍摄方案已经确定,误差传递系数ai即可通过表1中的计算式确定。我们假定解析点距离标定平面0.2m,则误差传递系数为:

由于镜头畸变误差是随测量点与标定中心距离变化而变化的,属未定系统误差,计算时分别取测量点距离标定中心不同位置时(分5段)的畸变误差的标准差:

根据标准差求各段畸变误差的极限误差。所谓极限误差[3],是指测量结果的误差不超过该极限误差的概率为P,并使差值(1-P)可以忽略。极限误差的表达式为:

式中ta为置信系数,它由给定的置信概率P=1-a和自由度v=n-1来确定。σx为算术平均值的标准差。在本研究中,已知v=n-1=9,取α=0.01,则ta=3.25;将上述值代入公式(2)得:

在本例中,随机误差δi则由两个部分组成,一部分为多次人工解析的随机误差,另一部分为原始数据进行平滑后的残差值。为计算多次人工解析误差,由同一解析员重复解析5次获得人体各关节点的原始坐标,采用低通滤波法对原始数据平滑,利用残差分析[30]法确定了截断频率选择9.83Hz,其中,残差值的具体计算公式为:

其中,R为残差值,fc为截断频率,Xi为原始数据,^Xi为平滑后的数据,N为采样数量,即所解析的画幅数。在本例中,所拍摄视频画幅数为53幅,即N=53。将先前得到的计算结果以及利用公式(3)计算得到的人体右膝关节点残差值代入公式(1)得:

以此方法,可以对所有19个人体标志点的位移参数进行误差合成,结果如图5所示。其中,误差极值最小是右侧肩关节点Y轴方向±14.9mm,最大值在左手X轴方向±82.6mm。重心合成后的极值误差X轴方向为±17.1mm,Y轴方向为±18.7mm。

图5 平面定机拍摄人体标志点位移参数的总极限误差图Figure 5. Total Limiting Errors of Human Marker’s Displacement Parameters in Two-Dimensional Imaging
3.3.2 立体定机拍摄的误差合成
对立体影像测量的误差合成,选择本次比赛女子20 km某运动员第2圈的一个单步技术动作为研究对象,两机拍摄距离为10m和15m,摄影基线(两机间距)为15 m,主光轴夹角约70°,拍摄频率为60Hz,一个单步动作共35幅画面,由同一解析员在APAS图像解析软件中对视频图像重复解析5次。在进行误差合成时,系统误差包括已定系统误差(图像分辨率误差和成像大小测定误差)以及未定系统误差(重构误差);而随机误差仍取多次人工解析的随机误差以及原始数据平滑后的残差值。其中,在成像大小测定误差的计算中,测得成像比例尺为1∶18.1。拍摄现场如图6所示。
各极限误差的计算方法与平面定机拍摄的误差计算方向相同,以下是对运动员右膝关节点X轴方向位移参数的误差合成计算:


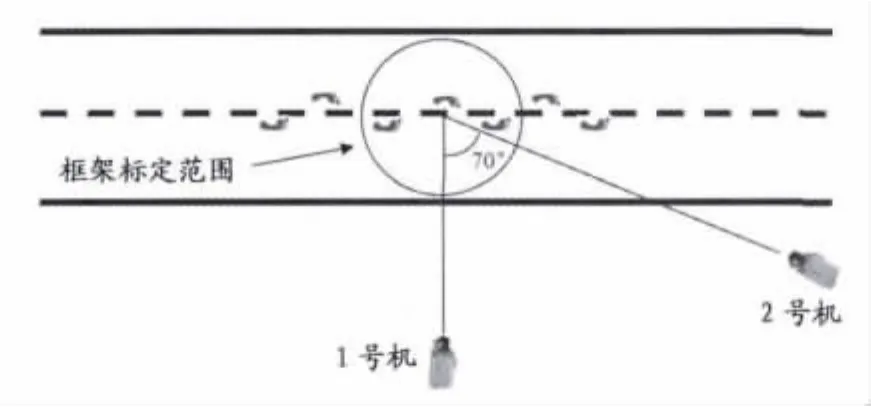
图6 立体定机拍摄现场示意图Figure 6. Diagrammatic Sketch of Three-Dimensional Imaging
由计算结果可知,解析结果中重心在X轴方向上的极限误差为8.05±4.9mm。图7是人体各关节点的位移参数极限误差值统计。在对平面和立体摄影测量方法的精度进行比较后发现,两种测量方法中,除个别被测点之外,其他被测点的极限误差值都基本保持在30mm以下。
4 讨论
从本研究的实验结果看,摄像机的畸变差对测量结果的精度有着较大的影响,尤其在图像边缘处。所以计算中必须考虑畸变差这一项。修正畸变通常使用的方法是基于图像畸变校正法,有网格标定法[11]、线阵激光标定法[7]等。罗红娥等人(2009)[10]的研究结果发现,经过修正后,畸变误差可由5mm减小到0.9mm。而孙大雁等人(2010)[14]通过修正算法修正后,可将图像相对精度提高40%以上。虽然上述研究可以证明,通过特定的修正算法可以对镜头畸变误差进行有效的修正,但各算法的计算过程比较复杂,需在特定的实验条件下对特制的标志物进行拍摄。更重要的是,在不同镜头、物距、焦距、像距和环境等条件下,还要对修正系数进行重新计算。这些因素使得对镜头畸变误差的修正无法满足运动影像测量方法快速处理和反馈的要求。因此,亟待提出一种快速有效的运动影像测量畸变误差修正方法来解决这一问题。而目前的图形图像处理软件和批处理技术为解决这一问题提供了可能[4]。

图7 立体定机拍摄人体标志点位移参数的总极限误差示意图Figure 7. Total Limiting Errors of Human Marker’s Displacement Parameters in Three-Dimensional Imaging
对于立体定机拍摄的重构误差问题,不少学者也曾做过类似研究(表2)。本研究是在改变基线长度的基础上进行的测量,其实质是摄像机拍摄夹角的变化对测量结果的影响。与以往单纯改变摄像机夹角进行拍摄的研究不同的是,在基线所在平面与标定框架X轴所在平面的垂直距离不变的情况下,基线长度的改变不但可以使我们了解到摄像机夹角变化对重构误差的影响,还可以使我们更好地理解摄像机机位变化分别对标定空间内XYZ三个方向精度的影响程度。
在对各误差源进行合成后,我们可以得到不同测量方法的误差范围,这一误差范围是综合了拍摄过程和解析过程中所有主要误差来源而进行的合成计算结果。可以看出,两种测量方法的误差范围在数值上没有太大差别,不论何种方法,绝大多数测量点的绝对误差值都在30mm以下,说明测量结果具有较好的稳定性。而对极限误差值超过30mm的被测点进行分析后发现,这些点在拍摄过程中都出现了被遮挡的情况,这很有可能是造成其测量精度下降的原因。
5 结论
1.从上述实验及分析结果来看,影像测量过程中的误差来源成分较为复杂。其中一些误差源的影响较小,可以忽略;但有些误差如果不加以控制,则会对测量结果产生较大影响。
2.镜头畸变误差,尤其在图像边缘处,是影响测量精度的一个重要因素,需要引起研究者足够的重视。虽然此误差源不能完全消除,但可以在一定程度上减小其对测量结果的影响。另外,在立体定机拍摄时,摄像机位置的改变对标定空间不同坐标轴方向的测量精度影响程度不同。
3.对运动影像测量过程中的各误差源,可以通过误差合成的理论与方法进行合成计算。通过误差合成计算,平面定机拍摄与立体定机拍摄条件下,对人体标志点位移参数的测量精度基本都维持在同一精度范围内。
[1]安朝臣.影像测量减少误差的方法[J].四川体育科学,1985,5(2):11-13.
[2]杜艳艳,侯曼,蔡宇辉.辐射式框架进行三维重构的精度分析[J].体育科研,2006:27(2):83-86.
[3]费业泰.误差理论与数据处理[M].北京:机械工业出版社,2005:70-71.
[4]贾谊,严波涛,刘占峰,等,运动影像分析中对镜头畸变的快速修正方法及应用实例[J].中国体育科技,2012,48(1):24-31.
[5]李良标.影片解析中人体测量点的确定方法[J].体育科学,1991,11(3):56-63.
[6]李旭鸿,侯曼.DLT算法中框架位置对三维重构精度的影响[J].体育科研,2005:26(5):73-75.
[7]凌伟,王志乾,高峰端.光电测量系统畸变的实时数字校正[J].光学精密工程,2007,15(2):277-282.
[8]卢德明.运动生物力学测量方法[M].北京:北京体育大学出版社,2001.
[9]卢青.高速摄影影片数据的误差源及其处理方法(一)[J].体育与科学,1984,5(1):21-24.
[10]罗红娥,陈平,顾金良,等.线阵CCD测量系统的镜头畸变校正新方法[J].半导体光电,2009,30(3):441-443.
[11]闵华松,姜靖.全自动数字图像畸变校正算法及其DSP实现[J].机器视觉,2007,(5):108-110.
[12]P·W·小肯尼迪;D·L·怀特,G·A·史密斯等.摄影和摄像技术三维直接线性变换(DLT)再现精度的比较[J].山东体育科技,1990,12(4):58-60.
[13]钱竞光,卢青,蔡国钧,等.关于用解析仪分析体育动作所产生误差的探讨[J].江苏体育科技,1984,(2):10-12.
[14]宋鹏,秦志辉,黄承佳,等.改变拍摄夹角对三维运动图像解析系统框架精度的影响研究[J].西南师范大学学报(自然科学版),2011,36(1):235-239.
[15]孙大雁,李永奎,赵萍,等.三维测量中相机镜头畸变修正算法的研究[J].农业科技与装备,2010,(2):28-30.
[16]杨年峰,王季军,黄昌华,等.直接线性变换法中标定对三维重构精度的影响[J].清华大学学报(自然科学版),2000:40(4):24-27.
[17]郑秀媛.现代运动生物力学[M].北京:国防工业出版社,2002:27-28.
[18]郑义.摄像测量方法的误差比较与分析[M].北京:北京体育大学,2007:44-45.
[19]B L SIH,M HUBBARD,K R WILLIAMS.Correcting out-of-plane errors in two-dimensional imaging using nonimagerelated information[J].J Biomechanics,2001,34(2):257-260.
[20]DELLA CROCE U,CAPPOZZO A.A spot-check for estimating stereo photogrammetric errors[J].Med Biol Eng Comput,2000,38:260-266.
[21]FUMÉE H.Three-dimensional analysis of human locomotion[M].New York:Wiley,1997:136-137.
[22]JAMES G.Richards.The measurement of human motion:A comparison of commercially available systems[J].Human Move Sci,1999,18:589-602.
[23]LI J A,BRYANT J T,STEVENSON J M.Single camera photogrammetric technique for restricted 3Dmotion analysis[J].J Biomedical Enginee,1990,12(1):69-74.
[24]MARTIN T P,PONGRATZ M B.Mathematical correction for photographic perspective error[J].Res Q,1974,45:318-323.
[25]MARTIN T P,PONGRATZ M B.Validation of a mathematical model for correction of photographic perspective error[M].Pennsylvania:University Park,1974:469-470.
[26] MONT HUBBARD,NEVILLE J DE MESTRE,JOHN SCOTT.Dependence of release variables in the shot put[J].J Biomech,2001,34(4):449-456.
[27]P GRIMSHAW,A LEES,N FOWLER.Sport and Exercise Biomechanics[M].NewYork:Taylor Francis Group,2007.
[28]ROGER BARTLETT,MELANIE BUSSEY,NICK FLYGER.Movement variability cannot be determined reliably from nomarker conditions[J].J Biomech,2006,39(16):3076-3079.
[29] ROGER BARTLETT.Introduction to Sports Biomechanics[M].New York:Taylor Francis Group,1997:170-171.
[30]WINTER D.Biomechanics and motor control of human movement[M].New York:Wiley,2009:70-71.
[31]Y EHARA,H FUJIMOTO,S MIYAZAKI,et al.Comparison of the performance of 3-D camera systems I[J].Gait Posture,1995,3(3):166-169.
