基于Fuzzy-CMAC的人体假肢系统智能控制方法研究
2012-11-27喻洪流徐兆红卢博睿张定国
喻洪流 徐兆红 卢博睿 张定国
1(上海理工大学生物力学与康复工程研究所,上海 200093)
2(上海交通大学机器人研究所,上海 200240)
引言
人体骨骼肌肉系统组成的生物力学体系对步行具有极强的自适应能力。研究一种可以近似模拟人腿生物力学系统中的关键特性—膝关节的自适应特性的智能大腿假肢(intelligent prosthetic leg,IPL)系统,对提高假肢的安全性与舒适性、改善截肢患者的生活质量具有重要意义。IPL系统模型的非线性、环境(路况)与不同假肢穿戴者参数的不确定性等决定了其复杂的系统特性,需要寻求有效的智能控制方法。
然而,在大腿假肢的智能控制方面,对智能控制的假肢应用还不多见。理论研究基本集中在一般模糊控制、普通BP神经网络控制、基于规则的专家控制等智能控制方法[1-3],更复杂的智能控制方法,如神经网络自适应控制、模糊专家控制等复合智能控制技术还基本未实际应用。Kalanovic等研究了基于FEL(feedback-error learning)的BP网络控制器与PD控制器结合的神经网络监督控制[1]。这种FEL控制方法由于采用了BP神经网络控制器,其实际应用的实时性差[4-5]。为此,笔者研究了一种保证IPL摆动步态对称性的 PD/Fuzzy-CMAC(cerebellar model articulation controller)自适应控制,以保证IPL系统控制的稳定性与实时性。
1 人体的正常步态特征及大腿假肢控制要求
人体的正常步态可以分成两个阶段,即双足支撑期和单足支撑期。在单足支撑末期,最大的垂直载荷产生,以后不久膝关节弯曲开始,为下肢摆动阶段做准备,所以,此时的膝关节弯曲阻力应该最小。在摆动阶段开始时,膝关节已经弯曲了30°,最大的膝关节弯曲角度为55°~65°,完成膝关节运动范围的这个时间非常短[6]。膝关节假肢应该以最小的弯曲阻力开始运动,从而自动适应一定范围的步态速度[7-8]。
控制型膝上假肢是安装在截肢者髋部以下的人工肢体,其控制系统必须与截肢者的生物运动系统相配合[9-10]。通常,比较理想的 AKP假肢期望达到以下控制要求[11]:在支撑相,具有足够的体重支撑稳定性和自动安全反应;具有绊倒时自动弯曲锁定的能力;能对整个步态周期、坐、站以及下楼/下坡等行走模式进行控制;具有响应步速瞬时变化的能力;能适应不同穿戴者的个性化配置要求,实现无需训练的自适应控制;具有在足后跟接触处吸收地面冲击的能力。
2 IPL的PD/Fuzzy-CMAC控制器设计
2.1 PD/Fuzzy-CMAC控制器设计
小脑模型控制器(CMAC)是一种自适应控制网络,因学习收敛速度快、精度较高,在实时工作时非常有用[12]。目前有多种CMAC控制形式,如 CMAC直接逆动态控制、CMAC前馈控制、CMAC反馈控制等。由于随着输入维数和(或)分辨能力的增加,CMAC所需的存储容量将呈几何级数增长,因此影响其输入空间的量化级数,限制了其最终的学习精度。为了寻求更好的IPL系统的智能控制方法,这里研究一种基于PD与Fuzzy-CMAC(模糊小脑模型神经网络,)复合的逆动态控制,其特点有两个:一是模糊小脑模型神经网络经控制器实现前馈控制,实现被控对象的逆动态模型;二是常规控制器实现反馈控制,保证系统的稳定性,且抑制扰动。
对于跟随健康腿目标信号控制的GF-IPL系统,设计采用了基于PD控制器的模糊神经网络(PD/Fuzzy-CMAC)监督控制模型(见图1),小脑神经网络通过PD控制器反馈控制获得的输出信号Up与系统输入信号向量X数据组进行在线训练。
2.2 Fuzzy-CMAC结构与学习算法
2.2.1 Fuzzy-CMAC网络结构
采用的Fuzzy-CMAC神经网络是模糊推理系统与CMAC网络的结合,其结构一般有5层构成,如图2所示。
1)输入层:将输入空间的输入值 X=(x1,x2,…,xn)T传送到下一层,X为膝关节转动角度 θ2与角速度。
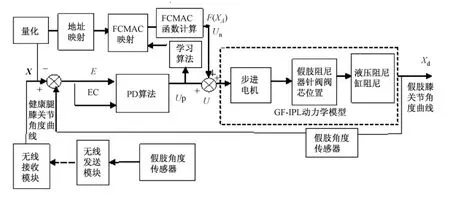
图1 GF-IPL系统的PD/Fuzzy-CMAC控制模型Fig.1 PD/Fuzzy-CMAC control model of GF-IPL system
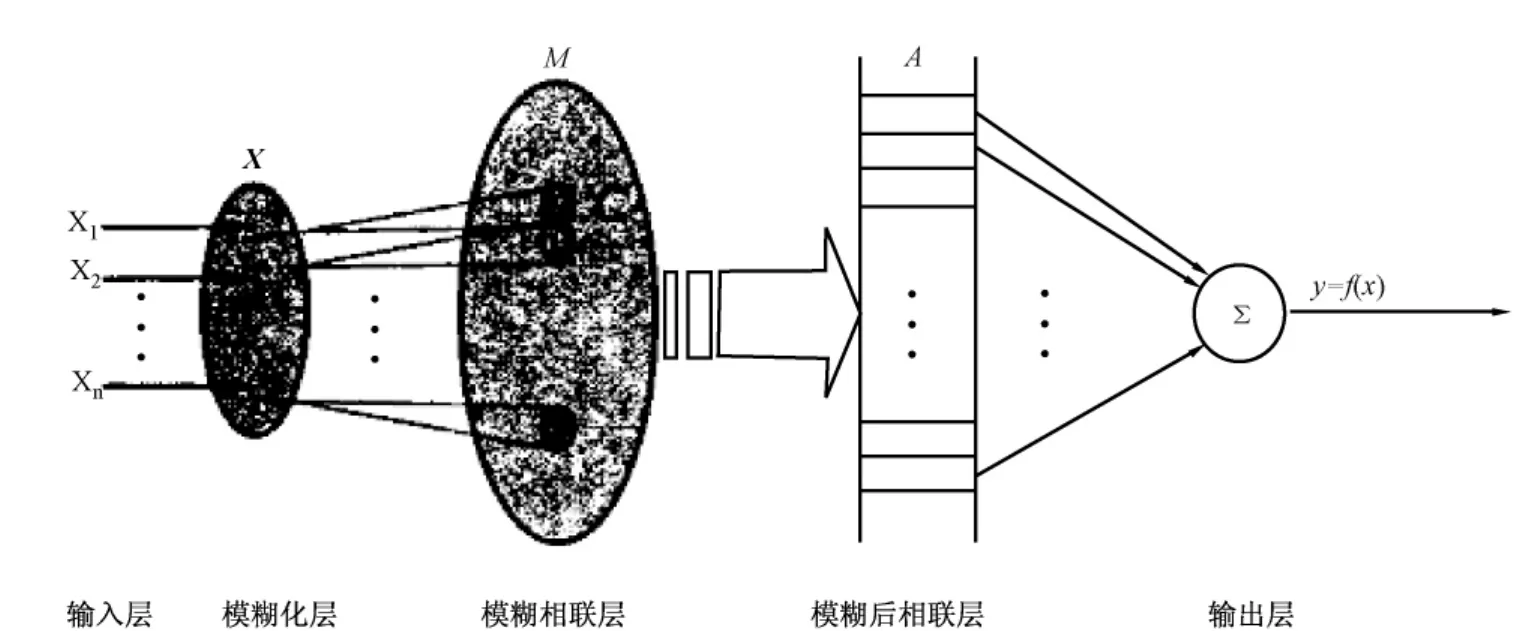
图2 Fuzzy-CMAC神经网络的结构示意图Fig.2 Fuzzy-CMAC neural network structure
2)模糊化层:模糊化层的每一个结点对应于一个语言变量,它完成一个输入隶属函数的计算。取搭接因子为2(overlap factor of 2)的三角函数作为输入隶属函数[5-6]。
3)模糊相联层:将模糊化层各个结点的输入进行模糊AND运算,得到相应的点火强度,也可以通过将模糊化层各个结点的输入相乘,得到相应的点火强度。
4)模糊后相联层:完成点火强度的归一化什算。
5)输出层:完成归一化点火强度的加权线性和,这里为控制器输出膝关节阻力矩M2。
2.2.2 PD/Fuzzy-CMAC学习算法
PD/Fuzzy-CMAC采用有监督的 δ学习算法。每一控制周期结束时,计算出相应的 Fuzzy-CMAC输出Un(k),并与总控制输入U(k)相比较,修正权重,进入学习过程。学习的目的是使总控制输入与Fuzzy-CMAC的输出之差最小,Fuzzy-CMAC的调整指标为
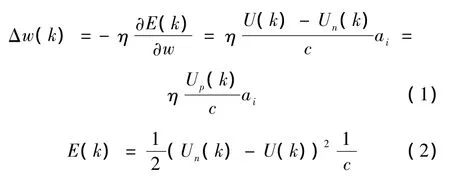
式中,η为网络学习速率,η∈(0,1)。

式中,α 为惯性量,α∈(0,1)。
当系统开始运行时,置w=0,此时Un(k)=0,U(k)=Up(k),系统由常规控制器进行控制。通过Fuzzy-CMAC的学习,使 PD产生的输出控制量 Up(k)逐渐为零,CMAC产生的输出控制量Un(k)逐渐逼近控制器总输出U(k)。
3 大腿假肢控制仿真研究动力学建模
为了仿真研究上述控制方案的效果,需要建立IPL作为控制对象的数学模型。传统上动力学逆问题可以归结为:已知轨迹规划给出的运动路径及各点的速度和加速度,求解驱动元件必须提供给主动关节随时间(或位移)变化的广义驱动力[13]。为了实现膝关节的轨迹跟踪控制,仅根据大腿的运动学参数直接对动力学方程进行逆向求解,以获得髋关节、膝关节及踝关节的力矩[14]。然而,据此计算出的关节力矩参数实际上无法用于大腿假肢的控制需要,因为影响大腿步态的关节力矩(特别是膝关节力矩)通常是由非线阻尼间接控制的,而控制用微处理器的输出无法根据这种数学模型的计算结果直接进行力矩跟踪。因此,本研究以二刚体大腿假肢运动系统为基础(见图3),建立基于非线性阻尼控制参数与人体髋关节力矩的人机动力学模型为
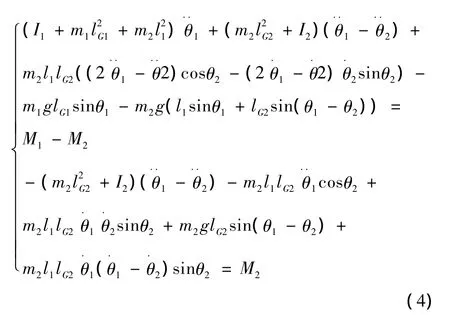
式中,m1、m2分别为大腿假肢的大腿与小腿质量,l1、l2分别为大腿与小腿长度,lG1、lG2分别为大腿与小腿质心位置,θ1、θ2为大腿与小腿的角度,I1、I2为大腿与小腿对质心的转动惯量,M1为大腿主动力矩,M2为膝关节液压缸阻力矩。
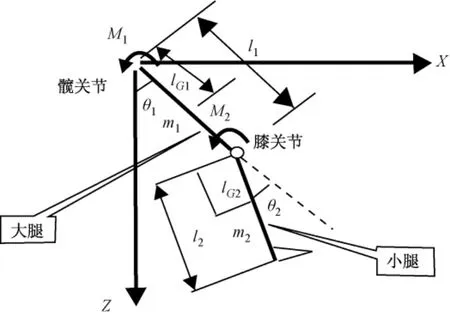
图3 假腿摆动期二刚体力学模型Fig.3 Two rigid-bodies model of IPL

式中,C1、C2均为根据非线性阻尼缸推导出的阻尼常数,Y为针阀开口位置。
4 PD/Fuzzy-CMAC控制仿真
4.1 仿真参数设置
由于这里研究基于PD/Fuzzy-CMAC控制器对大腿假肢的膝关节摆动轨迹的跟踪,因此图1控制模型中PID控制器的积分参数设置为零。根据智能大腿假肢实例的计算结果,与膝关节阻尼力矩有关的两个参数为C1=0.346,C2=1.76。
跟踪的目标曲线分别用一正弦曲线来模拟。大腿的髋关节与膝关节的转动是一个周期性的循环往复运动,尽管在站立期有所改变,但在摆动相的转动可近似于半个正弦曲线周期。由于只是研究PD/Fuzzy-CMAC控制器对大腿假肢的跟踪控制效果,这里设定控制器的两个输入目标参量均为正弦曲线。
在仿真实验中,为了获得符合实际需要的仿真实验结果,根据自行设计制作的一款液压智能大腿假肢样机结构,确定用于数值计算的动力学方程的主要参数如表1所示。

表1 仿真参数表Tab.1 Parameters for simulation
4.2 仿真结果
为了研究PD/Fuzzy-CMAC对GF-IPL系统的控制效果以及不同小腿参数(m2)改变对控制器鲁棒性的影响,这里按照如下不同频率与幅值的目标曲线与m2参数进行多种条件下的仿真。设定髋关节的摆动曲线θ1=sin(πt),膝关节的摆动目标曲线为θ2=sinπt,即在控制仿真时,假设以一标准的正弦曲线来模拟膝关节的摆动曲线。膝关节跟踪轨迹仿真结果见如图4,误差曲线见图5。由图4和图5可见,通过PD/Fuzzy-CMAC的控制,大腿假肢可以很快(约在0.5 s时间内)地跟踪目标曲线,收敛速度快,且精度高,实时性好。
对应图4的轨迹跟踪结果,仿真得到膝关节的力距曲线见图6,实际上这就是大腿假肢膝关节的阻力距曲线。
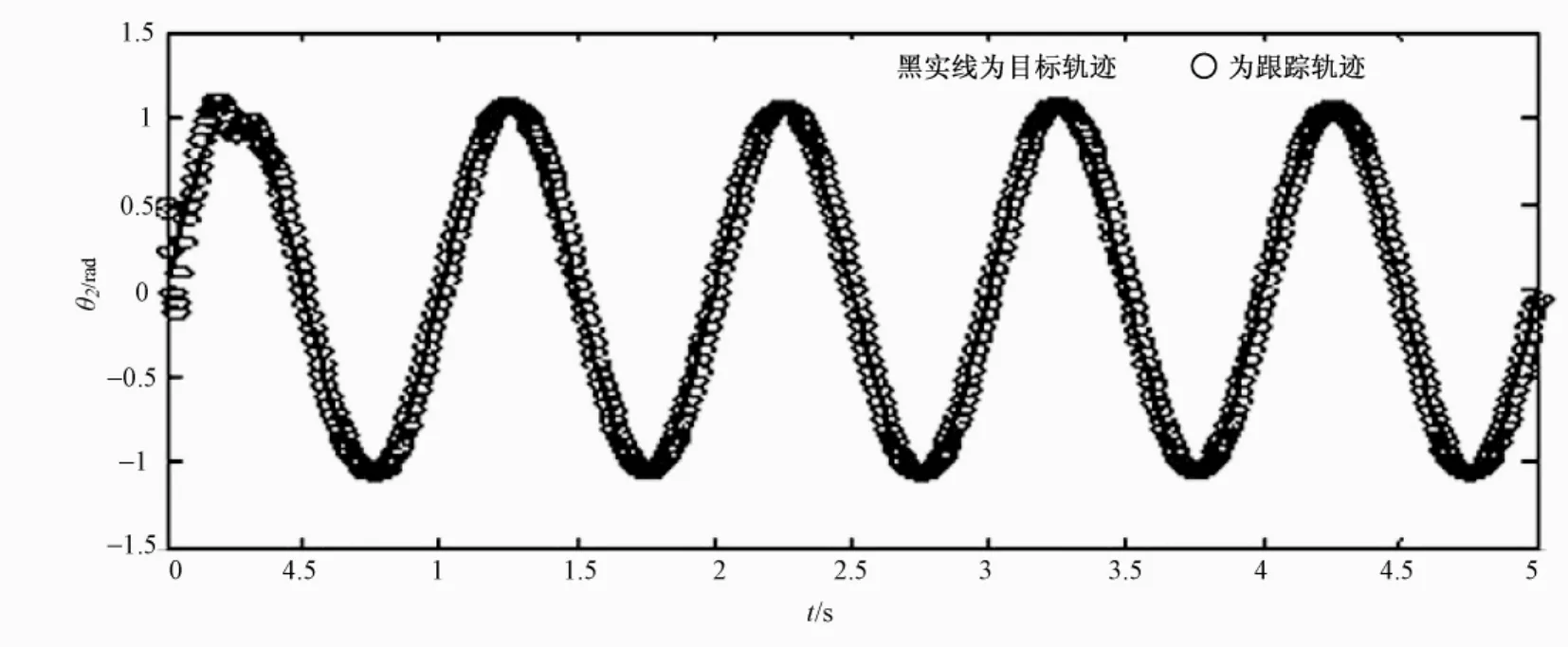
图4 膝关节的跟踪轨迹Fig.4 Tracking trajectory of knee joint
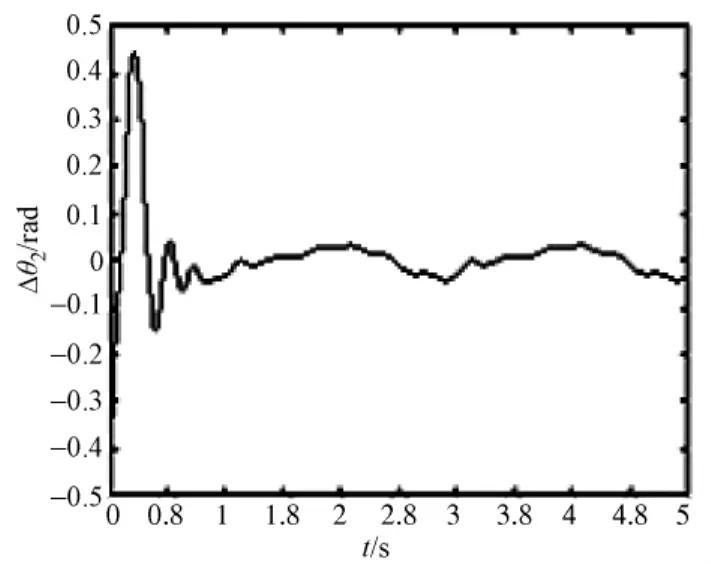
图5 膝关节误差曲线Fig.5 Tracking errors of knee joint
在大腿假肢控制中,膝关节的转动速度对大腿假肢的步态对称性至关重要[16-17],因此这里进一步仿真计算出膝关节的角速度(θ2)变化曲线,见图7(a)。在对膝关节力矩进行跟踪控制时,实际上是通过针阀步进电机控制针阀的开度Y,于是通过数学模型仿真计算对Y值的控制曲线,见图8(a)。为了便于分析,这里选取4~4.25 s时间段分别放大 θ2曲线及其对应的Y控制曲线,如图7(b)和图8(b)所示。结果显示,针阀的开口位置 Y减小(即阻尼力增大),则大腿假肢膝关节角速度降低。
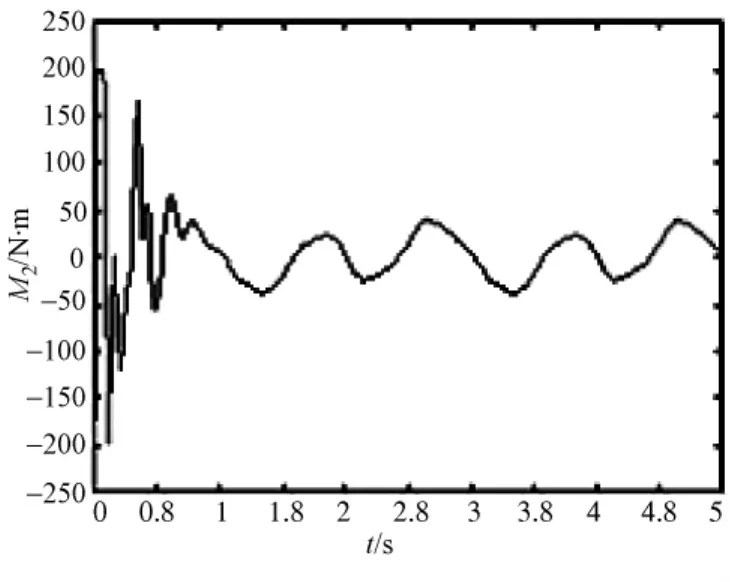
图6 膝关节力矩控制力矩曲线Fig.6 Torque of knee joint
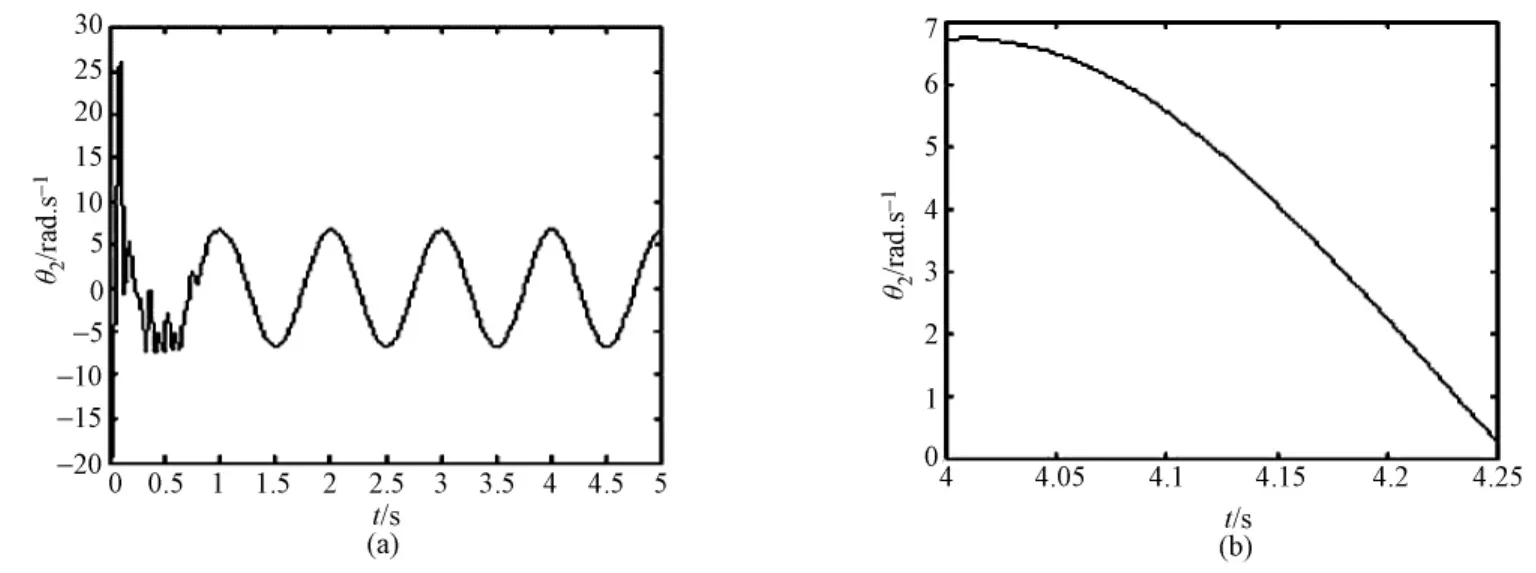
图7 膝关节角速度曲线。(a)0~5.0 s时间段;(b)4~4.25 s时间段Fig.7 Angular velocity of knee joint.(a)Period of 0 ~ 5.0 s;(b)Period of 4 ~ 4.25 s
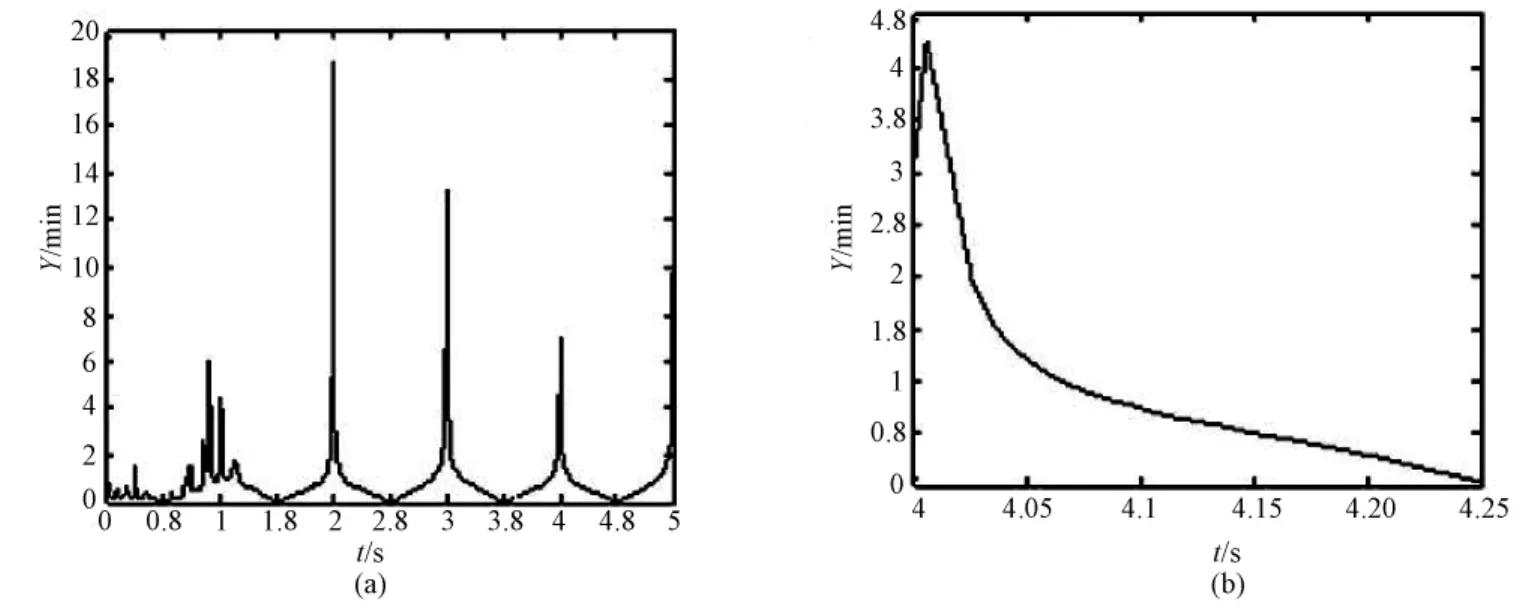
图8 阻尼器针阀开度Y控制曲线。(a)0~5.0 s时间段;(b)4~4.25 s时间段Fig.8 Opening value of damper pin valve.(a)Period of 0 ~ 5.0 s;(b)Period of 4 ~ 4.25 s
5 讨论和结论
在上述研究中,通过基于所建立的智能假腿实验物理模型及其非线性人机动力学对象模型,对PD/Fuzzy-CMAC控制方法进行了仿真实验。图4~图5的结果总体上表明,大腿假肢可以很好地跟踪目标曲线,这意味着通过实时在线来检测健康腿的膝关节角度曲线,可以通过PD/Fuzzy-CMAC来实现步态(速度)的跟随。
图6所示的膝关节阻尼力矩曲线是整个膝关节转动速度控制的核心部分,其控制需要适应膝关节实时交变力矩的要求。仿真结果显示,该阻力矩的控制结果与膝关节角度曲线的循环交变规律一致。
根据大腿假肢膝关节曲线跟踪的力矩要求,可以通过仿真计算出相应的膝关节阻尼器针阀开口位置Y的调节曲线(见图8)。该曲线与大腿假肢膝关节的角速度变化曲线具有显著的相关性。
仿真结果表明,可以通过PD/Fuzzy-CMAC控制器,对作为控制对象的假腿动力学模型进行控制,实现目标轨迹的有效实时跟踪。由此可知,实际应用时应该可以通过对假腿阻尼器针阀开口位置Y的调节,达到假腿跟踪健康腿摆动步态的目的。
本研究以一种自制的液压型智能大腿假肢结构为例,建立了基于非线性阻尼控制参数与人体髋关节力矩的人机动力学模型;通过设计一种PD/Fuzzy-CMAC逆动态复合控制的方法,实现膝关节轨迹跟踪的控制模型。基于人机动力学模型为对象的PD/Fuzzy-CMAC控制仿真结果表明,可以通过对假腿阻尼器针阀开口位置Y的调节,适应假腿结构参数与目标的变化,达到假腿实时跟踪健康腿摆动步态的目的。本研究不但为人体大腿假肢系统寻求到了一种新的控制方法,并且为智能大腿假肢研究提供了有意义的理论模型与分析方法。由于本PD/Fuzzy-CMAC控制方法目前仅处于控制建模与仿真阶段,下一步还需要移植到所研制的膝关节实验模型中进行进一步的实验研究与改进完善。
[1]Kalanovic VD,Popovic VD,Skaug D,et al.Feedback error learning neural network for trans-femoral prosthesis[J].IEEE Transactions on Rehabilitation Engineering,2000,8(1):71-80.
[2]金德闻,王人成.人工智能假肢[J].中国临床康复,2002,6(20):2994-2995.
[3]王斌锐,徐心和.智能仿生腿的研究[J].控制与决策,2004,19(2):121-133.
[4]Rao DH,Bitner D,Gupta MM,et al.Feedback-error learning scheme using recurrent neural networks for nonlinear dynamic systems[C]//Rao DH eds. IEEE World Congress on Computational Intelligence.Orlando,USA:IEEE Press,1994:175-180.
[5]喻洪流,钱省三,沈凌,等.微电脑控制假肢膝关节研究[J].中华物理医学与康复杂志,2007,29(9):642-644.
[6]Kaufman KR,Levine JA,Brey RH,et al.Gait and balance of trans-femoral amputees using passive mechanical and microprocessor-controlled prosthetic knees[J].Gait & Posture,2007,6(4):489-493.
[7]Koopman BF.Prosthetic knee stability during the push-off phase of walking experimental findings[C]//Koopman BF,eds.18th Annual International Conference of the IEEE. Amsterdam,IEEE,1996:471-472.
[8]Popovic D,Tomovic R,Tepavac D,et al.Control aspects an active A/K prosthesis[J].Journal of Man-Machine Studies,1991,35(6):751-767.
[9]Canina M,Vicentini F,Rovetta A,et al.Innovative Design Development And Prototyping Of Knee Prosthesis[C].//Canina M,eds.Proceedings of ROBTEP 2004,Automation/Robotic in Theory and Practice.Vysn Ruzbachy:Springer Press,2004:80-88.
[10]Hafner BJ,Willingham LL,Buell NC,et al.Evaluation of function,performance,and preference as transfemoral amputees transition from mechanical to microprocessor control of the prosthetic knee[J].Journal of Biomechanics,2007,88(2):207-217.
[11]Ptil KM,Chakrabort JK.Analysis of a new polycentric aboveknee prosthesis with a pneumatic swing phase control[J].Journal of Biomechanics,1991,24(3):323 -333.
[12]Yu Hongliu,Qian Xingsan,Li Shouwei,et al.Random reconnection leaning algorithm of CMAC model in prosthetic knee control[C]//Yu Hongliu,eds. Proceedings of IEEE 2007 InternationalConference on Engineering,Knowledge and Services.Shanghai:IEEE,2007:6472 -6475.
[13]刘金琨.先进PID控制 MATLAB仿真[M].(第2版).北京:电子工业出版社,2004:53-87.
[14]Bae TS,Choi KW,Mum M,et al.Dynamic analysis of aboveknee amputee gait[J].Clinical Biomechanics,2007,22(3):557-566.
[15]Wuhr J,Veltmann U,Linkemeyer L,et al.Influence of modern above-knee prostheses on the biomechanics ofgait[J].Advances in Medical Engineering,2007,114(4):267 -272.
[16]Zheng Yongping,Huang Qinghua,Chen Xin,et al.Sonomyography:monitoring morphological changes of forearm muscles in actions with feasibility for the control of powered prosthesis[J].Medical Engineering & Physics,2006,28(5):405-415.
[17]Vicentini F,Canina M,Rovetta A,et al.Final protoltype release and control setting methodologies[C]//Vicentini F,eds.Proceedings of Second International Conference on Informaticsin Control,Automation and Robotics. Roma:INSTICC Press,2007:163 -173.
