基于多尺度最大李雅普诺夫指数的表面肌电信号模式识别
2012-11-27邹晓阳
邹晓阳 雷 敏
(上海交通大学振动冲击噪声研究所,上海 200240)
引言
表面肌电信号与肌肉活动情况和功能特性之间存在着不同程度的关联性,在一定程度上反映了神经肌肉的状况和活动情况。动作表面肌电信号与肢体运动直接相关,肢体的不同动作具有不同的肌肉收缩模式.这些模式的差别反映在动作表面肌电信号特征的差异上,提取这些特征可以区分肢体的不同动作模式。因此,动作表面肌电信号的识别,对于如假肢控制和人-计算机交互系统等很多应用都非常重要[1-3]。表面肌电信号具有非周期、非随机、非线性和对初始条件敏感等混沌特性[4-5]。非线性指标用于动作表面肌电信号的模式识别得到了深入研究。例如,蔡立羽等利用掌长肌和肱桡肌两道表面肌电信号的分维数,对握拳、展拳、前臂旋前、前臂旋后等4类动作的识别率达90%以上[6]。针对表面肌电信号的非稳定特性,时频分析方法被广泛用于表面肌电信号的处理中[7-8]。罗志增等将时频分析方法用于动作表面肌电信号的模式识别,利用小波变换提取特征和隐马尔可夫模型分类,上翻、下翻、内旋和外旋4类动作的识别率均在 90% 以上[9]。
动作表面肌电信号的模式识别包含两个主要部分,一是提取有效的特征,二是形成分类决策的算法[10]。笔者在已有研究的基础上,提出将最大李雅普诺夫指数(the maximal Lyapunov exponent,MLE)和多尺度分析方法结合起来,形成多尺度最大李雅普诺夫指数(multi-scale maximal Lyapunov exponent,MSMLE)特征,并利用 MSMLE和支持向量机(support vector machine,SVM),对人体前臂的内翻、外翻、握拳、展拳、上切和下切6类动作的表面肌电信号进行识别。本方法克服了以往研究只是在单尺度上提取表面肌电信号的非线性特征的不足,结合多尺度分析方法,提取的MSMLE特征将在多个尺度上度量的MLE联合起来,更为全面和准确地反映了不同的动作表面肌电信号的内在非线性特性以及它们之间的差异,从而更有助于其模式识别。
1 表面肌电信号识别方法
1.1 动作表面肌电信号采集
针对人体手臂的运动特点,采集内翻、外翻、握拳、展拳、上切和下切等6类动作的表面肌电信号。所用仪器是MEGA公司生产的ME6000表面肌电信号采集仪,带通频率为 8~500 Hz,采样频率为 1 kHz,通道数为4,通道1为掌长肌,通道2为指浅屈肌,通道3为肱桡肌,通道4为指伸肌。每个通道有3个电极,电极为三点式差动输入,并相距15 mm左右。此实验总共采集了5个健康受试者的数据,得到了受试者的同意。实验之前,受试者状态良好,无任何疲劳。每个受试者每类动作采集60组数据,每组数据持续时间为1 s,即每个通道含1000点数据。
1.2 基于希尔伯特-黄变换的多尺度分解
希尔伯特-黄变换(Hilbert-Huang transform,HHT)根据信号自身的特点,通过经验模态分解(empirical modal decomposition,EMD),将信号分解成多个固有模态函数(intrinsic mode function,IMF)和1个剩余分量,即多尺度分解;然后利用希尔伯特变换求各个IMF的瞬时频率,构造希尔伯特谱,对信号进行分析[11]。
IMF满足两个条件:一是IMF的正、负极点数之和与其零点数相等,或最多相差1;二是由极值所形成的上下包络线的均值为零。具有这种特点的函数,可用来计算瞬时频率。令x(t)为分解后得到的IMF,由希尔伯特变换得到其对应的虚部为

式中,PV表示柯西主值。
实部和虚部组成的解析信号为

由此,可计算瞬时频率为

信号x(t)的EMD过程包括以下步骤。
步骤1:找到 x(t)的最大值和最小值,由三阶样条插值分别得到上下包络线,求上下包络线平均值,得 m1(t)。
步骤2:令 h1(t)=x(t)-m1(t),判断 h1(t)是否符合IMF条件,若不符合,继续对h1(t)进行步骤1操作,直至符合,并记为 c1(t),即分解出信号的第一阶IMF。
步骤3:求出余项x(t)-c1(t),对余项进行步骤1和步骤2操作,求得 c2(t),依此类推,直到分解出cn(t)和剩余分量r。当r是单调或常值函数,则分解结束。信号可以表示为一系列IMF和剩余分量之和,即

HHT能够对信号进行自适应多尺度分解。由于从信号本身的尺度特征出发对信号进行分解,该方法具有良好的局部适应性,加上瞬时频率的引入,便可以从时频两方面同时对信号进行分析,增加了处理信号的灵活性和有效性。应用HHT方法的EMD,对原始信号进行多尺度分解。
在所采集的动作表面肌电信号中,每组数据含有4个通道数据。利用HHT方法,对每个通道数据进行EMD,分解出8个IMF分量和1个剩余分量,这些分量所在的尺度分别记为 C1,…,C8和 R。表面肌电信号的EMD如图1所示:被分解信号为受试者内翻动作某个通道的数据,即原始信号;X表示原始信号尺度,即原始尺度。由图1可知,EMD将信号从高频到低频进行了多尺度分解。
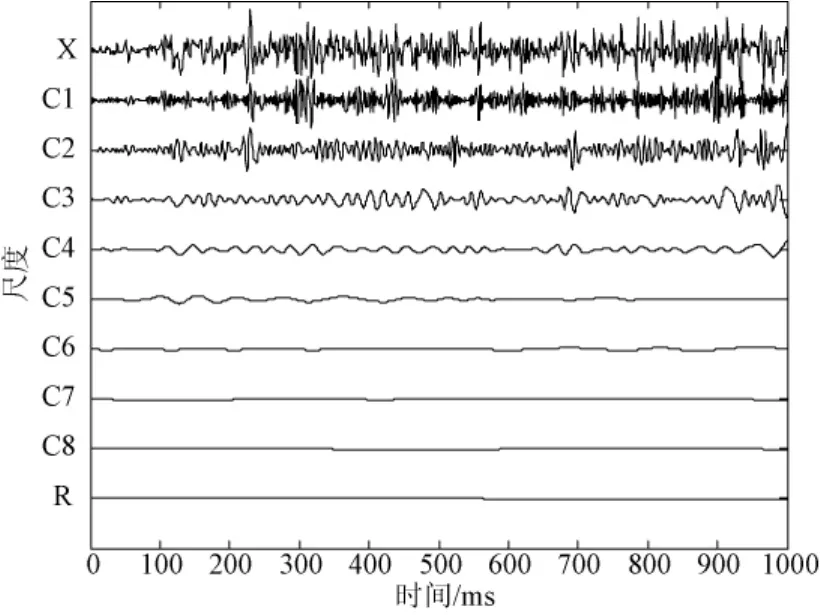
图1 原始信号的经验模态分解Fig.1 EMD of original signal
1.3 MSMLE特征
MLE能够定量地表示非线性动力系统在其相空间中的稳定状态,决定相邻轨线是否能靠近并形成稳定轨道或稳定定点,可作为表征非线性系统的特征。记MLE值为λ,不同的λ对应于不同的运动状态,如表 1 所示[12-13]。
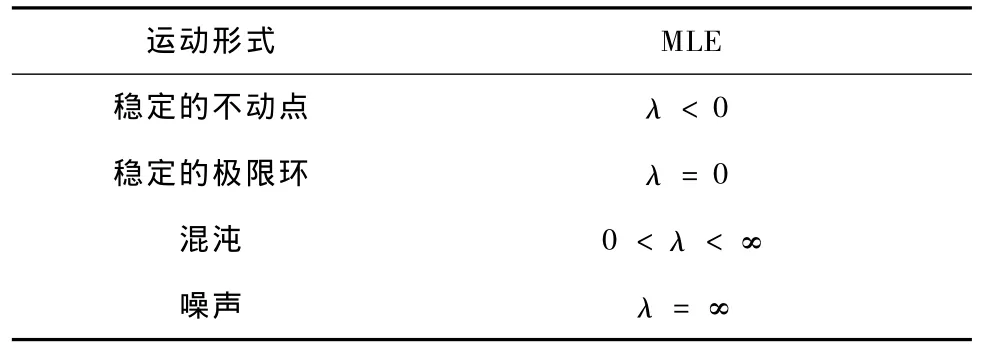
表1 运动类型和相应的MLE值Tab.1 Types of action and the corresponding MLE value
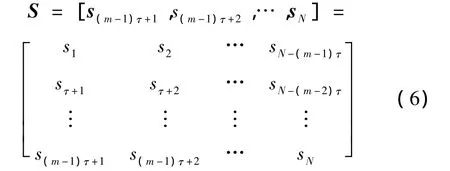
利用非线性时间序列分析方法计算λ,首先对所研究的动力系统建立相空间,即所谓的相空间重构。一般利用延迟坐标法对时间序列进行相空间重构。对时间序列{sn}(n=1,…,N)进行m维重构,则相空间中的一个点可由嵌入向量

表示,其中n≥(m -1)τ+1,相轨迹为
重构相空间的参数延迟时间τ和嵌入维数m很重要,笔者根据对人体表面肌电信号的已有研究[4],取m=6和τ=1对时间序列进行相空间重构,计算λ。
计算 MLE值的方法有 Wolf方法、小数据量法等。Wolf方法对数据的要求很高,比如数据长度要足够大,且不受噪声影响。小数据量法计算快,对嵌入维、延迟时间、数据长度和噪声等具有较好的鲁棒性,比较适合于计算生物医学信号的MLE值,但无法准确计算纯噪声序列的MLE值,而且序列的信噪比越低,噪声的影响越显著。笔者利用Kantz提出的稳健算法来计算 MLE值,这种算法计算简便,无需在演化过程中置换向量,因而使计算结果更准确,其基本原理如下[14-15]。
在重构相空间中选择时间序列的一个点sn0,选择距离小于ε的所有近邻点,计算所有近邻点到参考轨迹距离的平均值(是相对时间Δn的函数)。对很多的n0值,重复计算平均值,然后计算
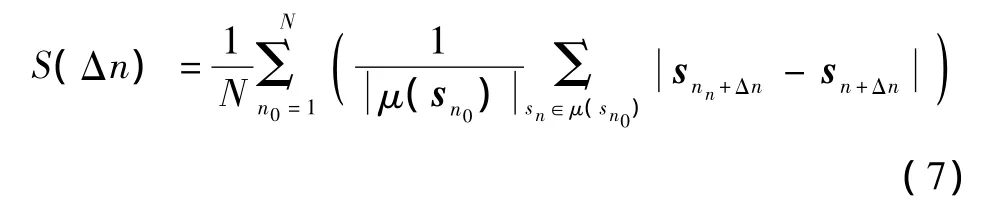
式中,参考点sn0是嵌入向量,μ(sn0)是sn0直径ε内的近邻点集合。
如果对于Δn的某个范围函数S(Δn)表现出稳定的线性增长,则它的斜率是每个时间步的MLE值的估计。
利用非线性时间序列分析方法,分别计算EMD分解后每个尺度的MLE值;所有尺度的MLE组成MSMLE特征,用于对动作表面肌电信号进行识别。
1.4 基于SVM的识别
SVM是由Vapnic于20世纪90年代提出的一种新的机器学习理论,是建立在统计学习理论的VC维理论和结构风险最小化原理基础上的。根据有限的样本信息,在模型的复杂性和学习能力之间寻求最佳折中,以期获得最好的推广能力[16]。SVM的基本原理是寻找一个满足分类要求的最优分类超平面,在保证分类精度的同时,能够使超平面两侧的空白区域最大化,实现对线性可分数据的最优分类。对于非线性问题,通过引入核映射方法,将低维空间中的非线性问题转化为高维空间的线性可分问题来解决。
在利用SVM对动作表面肌电信号进行识别时,每类动作的前30组数据放在一起构成训练集,后30组数据放在一起构成测试集。本研究所用SVM的工具箱为osu_svm3.00。
首先对MSMLE特征进行核主元分析(kernel principal component analysis,KPCA)降维,然后输入SVM进行模式识别。主元分析方法基于数据的二阶统计,可有效地找出数据中最主要的元素和结构,用一组较少的、互不相关的新变量(即主元)来代替原来较多的变量,使这些新变量保留原来数据反映的信息。KPCA方法是一种非线性主元分析方法,能够提取原始数据的非线性信息,其基本思想是通过非线性映射将原始空间数据映射到高维空间,然后对高维空间的映射数据进行主元分析,从而得到原始数据的非线性主元[17]。本研究所用的KPCA工具箱为统计模式识别工具箱stprtool(version 2.10)。
2 结果
2.1 原始信号MLE的识别结果
计算每组数据的4个通道数据的MLE值,组成特征向量,输入SVM进行识别。对每个受试者,计算出每类动作的识别率,并对6类动作的识别率进行平均,得到平均识别率。计算5个受试者的平均识别率的平均值,结果如表2的尺度X栏的数据所示,表中X表示原始尺度。
2.2 多尺度MSMLE的识别结果
EMD分解后,计算每个分解尺度上的MLE值,输入SVM,其识别效果见图2,横坐标表示不同尺度,纵坐标表示6类动作的平均识别率。其中,尺度C1、C2、C3和C4上信号的平均识别率较高,具体数值见表2中的尺度C1~C4栏。
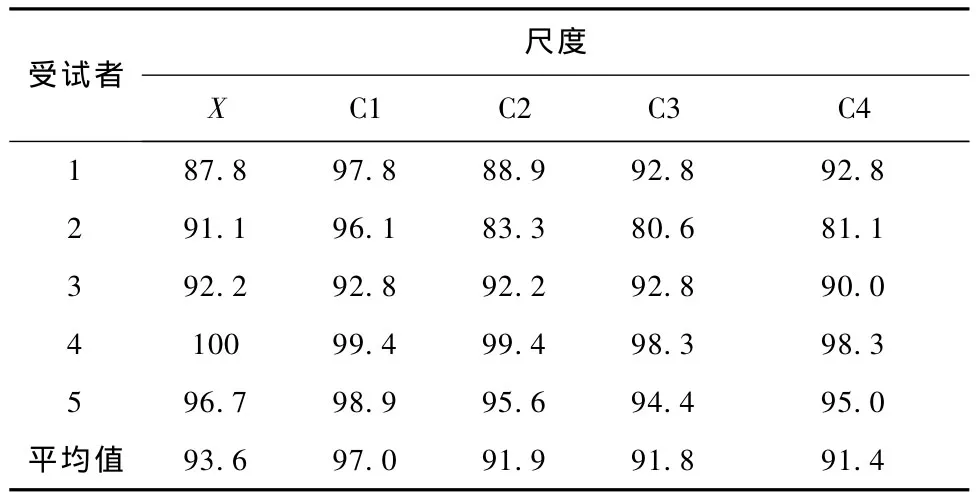
表2 原始尺度及C1~C4尺度的识别率Tab.2 Recognition accuracy(%)on original scale and C1~C4 scales %
MSMLE特征的维数为36,利用 KPCA将其降维到4~18后进行识别,其中KPCA的核函数选用径向基函数,识别结果见表3。
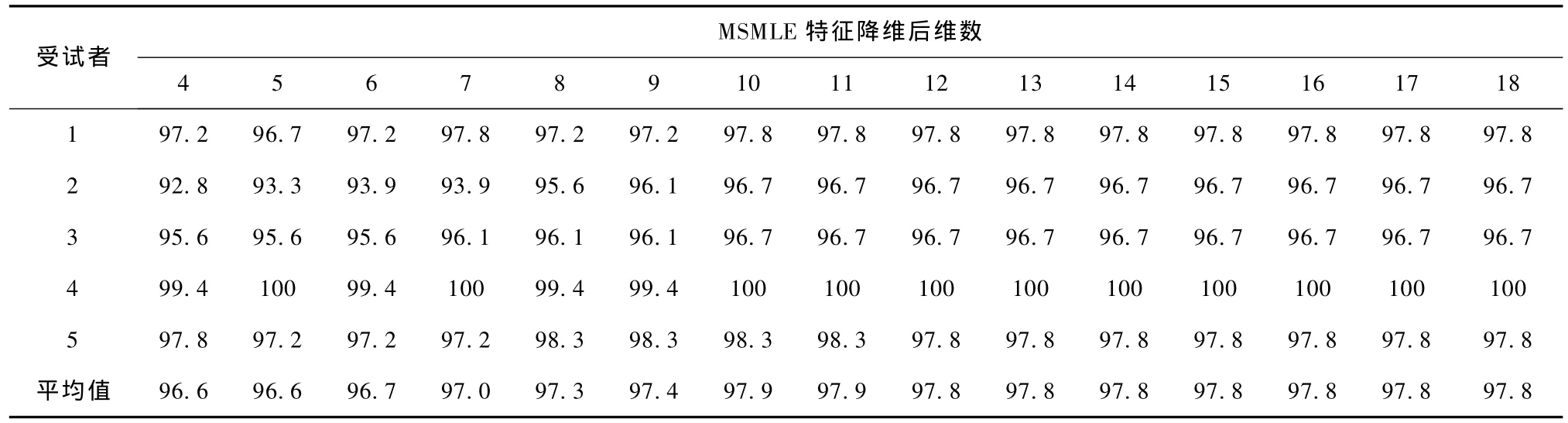
表3 4~18维MSMLE特征的平均识别率Tab.3 Mean recognition accuracy(%)of MSMLE feature of dimension ranging from 4 to 18 %
3 讨论
从表2的尺度X栏可以看到受试者4的平均识别率为100%,说明该受试者的6类动作全部被正确识别。5个受试者的平均识别率的平均值达到93.6%。结果表明,从非线性角度出发,不同动作属于不同的动力系统,具有不同的动力学特性,MLE是一个能够较好识别不同动作的特征。
EMD后,不同尺度上的识别率不同,其中C1~C4这4个尺度上的识别率较高。从表2的尺度C1~C4栏可以看到,这4个尺度上的识别率都在91%以上,C1上的识别率达到97%,高于原始信号的识别率93.6%。这说明,通过分解后,某些尺度上的特征更能够反映66类动作的差别,有更好的识别率。
从表3中可以看到,利用4~18维的MSMLE识别,平均识别率最小为92.8%,最大为100%,识别效果都比原始数据好而且平均识别率数值相差不大,具有一定的稳定性。为了比较,对每个受试者,MSMLE的平均识别率减去原始信号 MLE的平均识别率,利用得到的差值作图,如图3所示。可以很直观地看到,MSMLE特征的识别效果明显较好。利用MSMLE进行识别,受试者1的平均识别率提高最为显著,接下来依次是受试者2、受试者3、受试者5和受试者4。图3中受试者4的平均识别率差值为 -0.6%和0,这是因为该受试者的原始信号MLE平均识别率为1,即全部测试样本被正确识别;而受试者4的MSMLE的平均识别率在MSMLE为4、6、8和 9维时为 99.4%,其他维数时为 1。值得注意的是,5个受试者的平均识别率基本在10~12维以后保持稳定,基本在96.7% ~97.8%之间。总体上看,MSMLE能够得到较高的平均识别率。
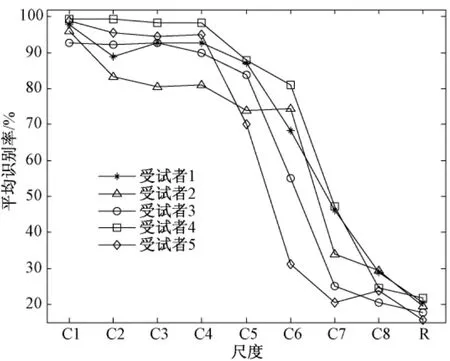
图2 C1~R尺度的平均识别率Fig.2 Mean recognition accuracy from scale C1 to scale R
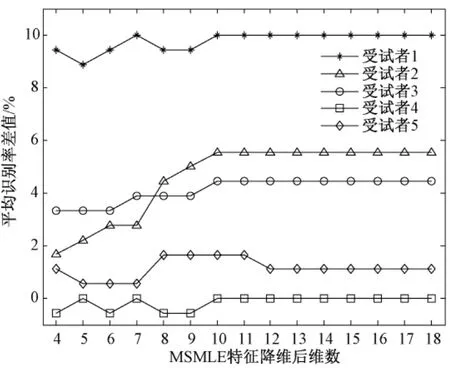
图3 MSMLE与原始信号MLE的平均识别率差值Fig.3 The difference of mean recognition of MSMLE minus that of original signal MLE
为了定量表示MSMLE特征对识别效果的提高,计算表3最后一行的平均值得到97.5%,与原始信号的平均识别率相比,提高了3.9%。这一结果说明,在多尺度上提取非线性特征,克服了单尺度上相应特征不能充分展开动作表面肌电信号的内在特性及其差别的不足,较好地提高了模式识别的正确率。根据动作表面肌电信号的非线性特征,利用多尺度分析方法,挖掘不同尺度上的特征差别,能够更好地表现不同动作模式之间的差别,提高模式识别的识别率,为实际应用打下良好基础。
动作表面肌电信号记录的是动作电位的变化,理想情况下应该是参与运动的特定运动单元的电位变化,实际上记录的电位变化包含周围运动单元电位变化的影响、运动单元与人体皮肤之间组织导电性质的影响、记录电极相对肌纤维滑动的影响和环境噪声的影响。通过多尺度分解,可在一定程度上把主要电位变化和这些影响分开,从而不仅能够更准确地提取主要电位变化的特征,而且能够在多个尺度上提取多个特征,更好地表征相应的动作,提高识别率。动作表面的肌电信号在不同尺度上具有不同的变化和非线性特性,而多尺度分解可以把这些特性充分展开,从而更易于分类。本研究所应用的非线性特征是MLE特征,所引用的多尺度分析方法为HHT的EMD方法,除此之外,可以尝试应用其他非线性特征和其他多尺度分析方法,以开展进一步的研究。
4 结论
针对表面肌电信号在假肢控制和人-计算机交互系统等应用研究方面的基础性问题(即表面肌电信号的模式识别),笔者在已有的动作表面肌电信号识别研究的基础上,提出将多尺度分析和非线性分析相结合,以 MSMLE为特征,对人体前臂的内翻、外翻、握拳、展拳、下切和下切6类动作的表面肌电信号进行识别,平均识别率达到97.5%.结果表明,本方法克服了以往研究在单尺度上提取表面肌电信号的非线性特征的不足,对于动作表面肌电信号的识别具有较好的效果。应用的分解方法是基于HHT的经验模态分解,今后可尝试应用小波变换等分解方法。除了MLE特征,还可在多尺度上提取其他特征,或者在不同尺度上提取最适宜该尺度的识别特征来进行联合识别,这是下一步的研究方向。
[1]王人成,郑双喜,蔡付文,等.基于表面肌电信号的手指运动模式识别系统[J].中国康复医学工程,2008,23(5):410-412.
[2]Wakita Y.Development of the robot arm control system using forearm sEMG [C]//Lim CT,eds. Proceedings of ICBME2008.Berlin:Springer-Verlag,2009:710-713.
[3]田建勋,陈香,李云,等.一种基于加速度与表面肌电信息融合和统计语言模型的连续手语识别方法[J].中国生物医学工程学报,2011,30(3):333-339.
[4]雷敏.非线性时间序列分析及其在动作表面肌电信号中的应用研究[D].上海:上海交通大学,2000.
[5]刘加海,王丽,王健.基于相空间、熵和复杂度变化的表面肌电信号分析[J].浙江大学学报(理学版),2006,33(2):182-186.
[6]蔡立羽,王志中,张海虹.基于混沌、分形理论的表面肌电信号非线性分析[J].北京生物医学工程,2000,19(2):82-86.
[7]Almanji A,Chang JY. Feature extraction of surface electromyography signals with continuous wavelet entropy transform[J].Microsyst Technol,2011,17:1187-1196.
[8]李醒飞,朱嘉,杨晶晶,等.基于肌电信号的人手运动状态的辨识[J].中国生物医学工程学报,2007,26(2):166-169.
[9]罗志增,严庭芳.基于HMM的表面肌电信号模式分类[J].华中科技大学学报(自然科学版),2008,36(4):72-75.
[10]Chen Xinpu,Zhu Xiangyang,Zhang Dingguo.A discriminant bispectrum feature for surface electromyogram signal classification[J].Medical Engineering& Physics,2010,32:126-135.
[11]Wu Zhaohua, Huang E. Ensemble empirical modedecomposition:a noise-assisted data analysis method [J].Advances in Adaptive Data Analysis,2009,1(1):1 -41.
[12]刘秉正,彭建华.非线性动力学[M].北京:高等教育出版社,2005:403-415.
[13]Kantz H,Schreiber T.Nonlinear Time Series Analysis[M].(2nd edition).UK:Cambridge University Press,2004:.65-74.
[14]Kantz H.A robust method to estimate the maximal Lyapunov exponent of a time series[J].Phys Lett A,1994,185:77-87.
[15]刘数勇,俞翔,朱石坚.实测振动信号的Lyapunov指数的计算与混沌识别[J].武汉理工大学学报(交通科学与工程版),2008,32(1):81-84.
[16]Weston J,Watkins C.Multi-Class Support Vector Machines[R].Royal Holloway College,Tech Rep:CSD TR-98-04,1998.
[17]梁胜杰,张志华,崔立林.主成分分析法与核主成分分析法在机械噪声数据降维中的应用比较[J].中国机械工程,2011,22(1):80-83.
