飞机电传刹车半实物仿真技术的研究
2012-11-22苏田青
苏田青,林 辉
(西北工业大学,陕西西安710129)
0 引 言
半实物仿真技术又称为硬件在回路仿真技术,在条件允许的情况下尽可能在仿真系统中接入实物,以取代相应部分的数学模型,这样更接近于实际情况,提高了仿真结果的置信度,是提高系统设计的可靠性和研制质量的有效手段。
电传刹车技术与传统的液压刹车技术相比,用机电作动器代替了传统的液压活塞,简化了液压系统中复杂的管路,极大减轻了飞机重量;同时,电传系统具有完善的故障检测能力,易于故障识别和隔离,飞机更易于维修;电传刹车反馈闭环控制,刹车动态性能好,效率高,提高了飞机战斗生存能力[1-2]。
1 飞机电传刹车半实物仿真系统
1.1 半实物仿真系统结构
半实物仿真系统结构图如图1 所示。
图1 中,飞机模型部分通过正确代入飞机参数计算得到飞机的滑跑距离、飞机速度、机轮速度、飞机俯仰角等关键物理量。防滑控制盒按基于给定飞机减速率的防滑刹车控制律计算得出给定刹车压力。电机部分对刹车压力实现闭环控制,通过刹车装置输出刹车力矩。
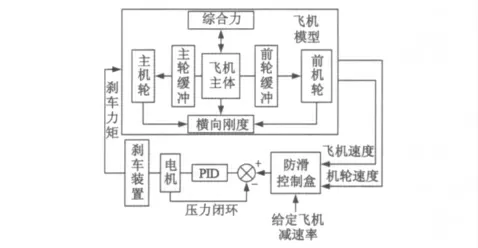
图1 半实物仿真系统结构图
1.2 MATLAB-DSP 自动代码生成技术
MATLAB /Simulink 提供的Target Support Package TC2 软件支持Taxes Instrument 公司C2000 系列DSP,提供DSP 所有功能接口模块,运用该工具建立数字仿真Simulink 框图;再利用MATLAB 实时工作平台RTW 就可以由Simulink 框图生成优化的语言(如C 和Ada)代码,产生的代码既可以提高仿真的速度,又可以生成半实物仿真和实时控制与快速原型设计所需的代码。RTW 建立起偏重软件的系统设计和偏重硬件的产品开发之间的联系[3]。
2 半实物仿真的设计
半实物仿真部分包括建立飞机模型、设计刹车控制律和代码的自动生成技术。飞机电传刹车半实物仿真系统数字仿真是应用MATLAB 2009a 的Simulink 框图直接生成代码程序于SEED-DEC28335中运行来实现的。
2.1 数字仿真部分的结构
数字仿真结构图如图2 所示。

图2 数字仿真结构图
由图2 可知,数字仿真的设计主要完成仿真模型的建立,代码的自动生成和实验结果的上传。
2.2 防滑控制策略的设计
飞机在正常刹车的过程中,若刹车压力过大,机轮会出现打滑甚至抱死的现象。这种情况是相当危险的,有可能导致机轮轮胎的磨损、爆胎,从而导致飞机滑出跑道,甚至机毁人亡[4]。
防滑控制策略结构框图如图3 所示。

图3 防滑控制策略结构框图
由图3 可知,防滑控制盒采用PD + PBM 的防滑控制与给定减速率跟踪控制相结合的控制策略。给定减速率与飞机速度的误差作为分段PID 控制模块的输入,输出部分作为刹车力的电流信号;PD +PBM 环节以机轮速度为输入,计算出基准速度后,以两者的误差作为控制模块的输入,机轮跟踪基准速度,输出部分作为防滑力的电流信号;刹车力和防滑力相减,就得到实际刹车压力。
该防滑控制策略的设计,既能够实现机轮防滑控制,也能够满足飞机速度减速率的要求,实现固定减速率不同档位的自动刹车技术。
2.3 代码自动生成前的程序框图
代码自动生成前的程序框图如图4 所示。
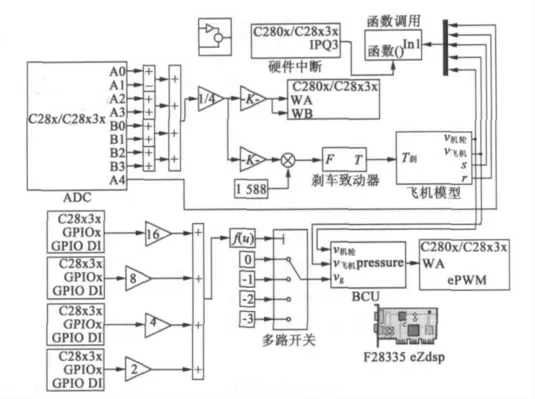
图4 代码自动生成前的程序框图
由图4 可知,系统在正确的飞机模型搭建基础上,相应的接口利用Target Support Package TC2 中的功能模块,其中,ADC 模块共用9 路,8 路作为双余度4 个电机压力传感器的压力采集信号,1 路作为PWM 信号触发ADC 采样;GPIO 模块共用4 个,通过4 位二进制编码得到刹车选择开关的档位;硬件中断和SCI 模块以及定时器各用一个,定时器产生硬件中断,利用SCI 模块将包括帧头帧尾、8 路压力、飞机速度、机轮速度、滑跑距离、给定压力和反馈压力的15 路信号传送给上位机;PWM 模块共用2个,1 个作为上述ADC 采样的触发信号,另1 个通过相应的硬件滤波电路将刹车压力信号传给硬件部分。
3 电传刹车系统硬件设计
3.1 系统硬件部分总体框架
系统硬件总体框架图如图5 所示。

图5 系统硬件总体框架图
由图5 可知,硬件部分以DSP + CPLD 数字核心,利用DSP 强大的运算能力,完成给定压力调节、SCI 串口通讯,双余度无刷直流电动机的PWM 控制、电机位置和转速的捕获、故障信号的反馈等功能;利用CPLD 强大的逻辑运算能力,完成电机转向调节、使能控制、三相全桥控制信号调理、以及逻辑故障检测等功能。
3.2 CPLD 处理逻辑信号
CPLD 具有强大的逻辑运算能力,将DSP 输出的电机使能信号、转向信号、T1PWM 信号与转子位置霍尔信号按照一定的逻辑运算,输出用于控制无刷直流电动机开关电路(三相全桥逆变电路)中开关管导通、关断的初始PWM 信号,这些PWM 信号经过隔离和功率放大,控制开关电路,进而驱动无刷直流电动机按要求转动。
利用QUARTUS II 软件验证的电机驱动信号时序图如图6 所示。

图6 电机驱动信号时序图
由于采用的是“上斩下不斩”的控制方法,所以输出的APWM1、APWM3、APWM5 有斩波,APWM2、APWM4、APWM6 为高、低电平。
当DIR1 信号由 “0”变为 “1”后,在APWM1~APWM6 的作用下,开关电路上6 个开关管的开通顺序发生变化,电机实现反转。
当ENABLE1 信号由 “0”变为 “1”后,逻辑中“1”代表禁止电机转动,则输出的APWM1、APWM3、APWM5 变为高电平(驱动电路对低有效),APWM2、APWM4、APWM6 继续为高、低电平,则开关电路的上桥臂均不导通,电机停止转动。
3.3 数据采集电路的设计
本系统中,应实现对反馈压力信号和电流信号的采集处理。上位机需要实时记录刹车压力信号,在传输过程中若以电压的形式传送,导线上会产生明显的衰减和引入大量的电磁干扰。解决方式为运用XTR111 芯片设计电压转电流电路。0~3 V 电压信号转换为0~20 mA 电流信号,对应0~15 000 N的刹车盘载荷压力。电压转电流电路如图7(a)所示。
电流采样单元如图7(b)所示。电流采样芯片选用ACS712。ACS712 芯片串联在逆变器的母线电流回路中,从而测得电机的母线电流。由于芯片采用了霍尔技术,较好地隔离了强电电路和弱电电路。

图7 数据采集电路
3.4 双余度无刷直流电机的设计
全电刹车系统要求机电作动机构反应灵敏,能够快速地起动、停止、加速和减速,且运行平稳、到位准确。双余度无刷直流电机转矩响应快、控制特性好、运行效率高、任务可靠性高,能够满足系统要求。
本文设计的双余度无刷直流电动机定子绕组为双绕组,由两套在空间上互差30°电角度且彼此电气隔离的Y 型连接的绕组组成。两套绕组彼此互为余度,在空间上有电磁耦合。输出力矩是两套绕组与电机磁场作用产生的合成输出力矩。正常情况下,系统双余度模式运行,两套绕组各承担一半负载。此时电机的机电常数小,动态性能高。当一套绕组出现故障,采用余度管理,将故障部分从系统内切除,系统转换成单通道模式下运行,从而实现容错和提高系统可靠性的目的。
4 实验结果分析
飞机电传刹车系统可对飞机整个着陆刹车过程进行试验。电传自动刹车分为高、中、低三档,分别对应3.05 m/s2、2.1 m/s2、1.5 m/s2的减速率。
选择“高”档时自动刹车的实验结果如图8 所示。
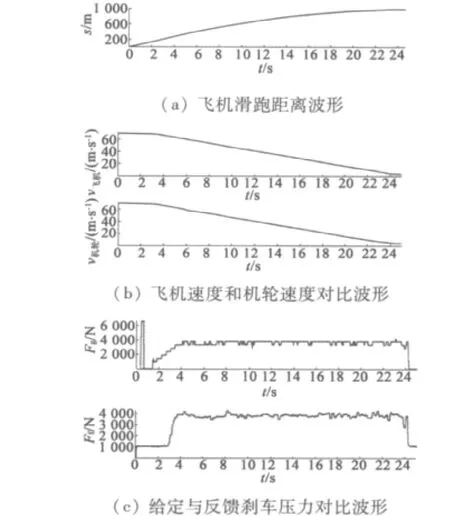
图8 选择“高”档时自动刹车的实验结果
选择“高”档3.05 m/s2减速率刹车时,飞机初始速度72 m/s,理想刹车结果:
如图8(a)所示,刹车时间24 s,滑跑距离990 m,时间误差0.4 s,距离误差140.6 m。考虑到实际刹车动作的执行比给定信号延迟2~3s,开始时飞机以略小于初始速度(平均68 m/s)运行2~3 s(滑跑距离136~204 m),才开始正常减速,距离误差不可避免,在可以接受的范围内,所以实验结果与实际相符,满足刹车系统性能指标要求。
图8(b)为飞机速度和机轮速度对比波形,两条曲线基本重合,下降平稳,没有出现较大的波动和机轮打滑,说明自动刹车过程平稳,安全性高,可控性强。
图8(c)为给定与反馈刹车压力对比波形,除了压力给定输出开始阶段出现瞬间较大的超调(控制律参数调节尚需完善)外,压力反馈和压力给定曲线一致性较好,稳定值都在3 850 N 左右,压力值基本恒定,过程平稳,满足自动刹车平稳性能指标以及刹车系统设计要求。
[1] 刘冠志.飞机全电刹车驱动器设计与关键技术研究[J].计算机测量与控制,2010,18(2):326-328.
[2] Lennon W K,Passino K M.Intelligent control for brake systems[J].IEEE Transactions on control systems technology,1999,7(2):188-202.
[3] 张祥,杨志刚,张彦生.MATLAB /Simulink 模型到C /C + + 代码的自动生成[J].重庆工学院学报,2006,20(11):111-113.
[4] 蔡文举.飞机全电防滑刹车控制器设计[D].西安:西北工业大学,2007.
