基于平方和的一类不确定非线性系统的鲁棒稳定性
2012-08-17陈少燕厦门大学福建厦门361005
陈少燕(厦门大学,福建 厦门 361005)
1 引言
不确定系统的鲁棒分析与综合问题一直以来都是控制界的研究热点,目前大多采用Lyapunov稳定理论来研究,其中二次稳定是一个非常重要的概念和方法[1]。但是,二次稳定性要求对所有的不确定参数,存在一个公共的Lyapunov函数,这种要求过于苛刻,因此二次稳定是一个较为保守的概念[2]。如果能够根据变化的参数选取不同Lyapunov函数,就可以大大降低系统设计的保守性。因此,不少学者通过将Lyapunov变量参数化来获得一类依参数Lyapunov函数的稳定条件[3-5]。相对于单一Lyapunov函数的稳定条件,其系统保守性得到明显改善。但是以上方法运用于线性模型或者模型近似线性化上,这样处理上丢失了原模型中的非线性部分,得到的结果精度较低。
近年来,由于SOS理论的提出,许多学者采用SOS理论分别对非线性系统的鲁棒性和稳定性分析、几何定理证明、量子信息论、吸引域估计等问题进行了研究。SOS理论在处理非线性控制问题过程中的优势在于:(1)非凸非线性控制问题可以转化为凸优化问题;(2)不需要对原始模型进行过多的化简近似;(3)得到的控制器是关于状态变量的多项式方程,便于工程执行。
本文针对一类不确定非线性系统,利用SOS理论结合Lyapunov函数[6]的方法,给出了使系统稳定的非线性控制器设计方法,最后利用SOSTOOLS[7-9]工具箱求解出控制律。本文将用SOS理论方法弥补以往设计方法中不能给出系统有效控制器设计和求解方法的不足。此外,采用的SOS理论方法弥补了文献[6]中LMI不能计算全局解的不足。
2 基于SOS理论的非线性状态反馈控制器设计
定义1[6]:对于多项式f(x),如果存在一组多项式fi(x) 满足:

则称多项式f(x)允许平方和分解,或称多项式f(x)是SOS。
引理2[6]:多项式f(x)(d e g (f(x) )=2d)是SOS,当且仅当存在半正定矩阵Q≥0及单项式向量Z(x)( d eg(Z(x))≤d),使得:

考虑一类不确定非线性系统

这里A(x),B(x)为含x的多项式矩阵, ∆A(x)和∆B(x)分别是函数矩阵A(x)和B(x)的不确定项;Z(x)为含x的N×1多项式,并且满足假设3。
假设3[6]:当且仅当x=0时,Z(x)=0 。
定义矩阵函数M(x)为N×n的多项式矩阵,Mij(x)是矩阵函数M(x)第(i,j)个元素,定义为:

其中i= 1 ,L ,N,j= 1,Ln。
假设4[10]:

其中:F(x) ∈ ℜs×s,其满足不等式(6):

其中:I是适当维数的单位矩阵;H∈ ℜn×s、E1∈ℜs×N和E2∈ℜs×m是 已知的定常数矩阵。
为找到一个状态反馈控制器u=k(x) =F(x)Z(x),使得系统在平衡点x=0稳定,所以我们提出定理7。下面的引理对定理7证明有关键性作用。
引理5[11]:已知适当维数的矩阵H、E和Y,其中Y是对称矩阵,矩阵不等式:

对所有满足条件(6)的F(x)都成立,当且仅当存在一个标量ε> 0,使得

引理 6[12]:(S c h u r补引理)对于非线性对称矩阵Q(x) =QT(x)、R(x) =RT(x)和S(x),矩阵不等式
等价于R(x)>0 ,Q(x) −S(x)R−1(x)ST(x)>0 。
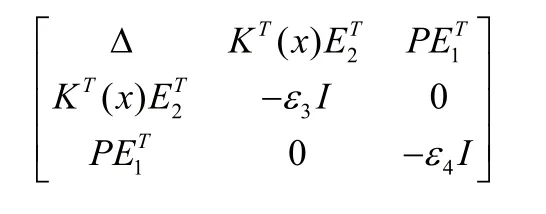
定理7:对于系统(3),假设存在对称常数矩阵P,多项式矩阵函数K(x),常数ε1>0、ε3>0、ε4>0及正定函数ε2(x),使得下列矩阵表达式是SOS,
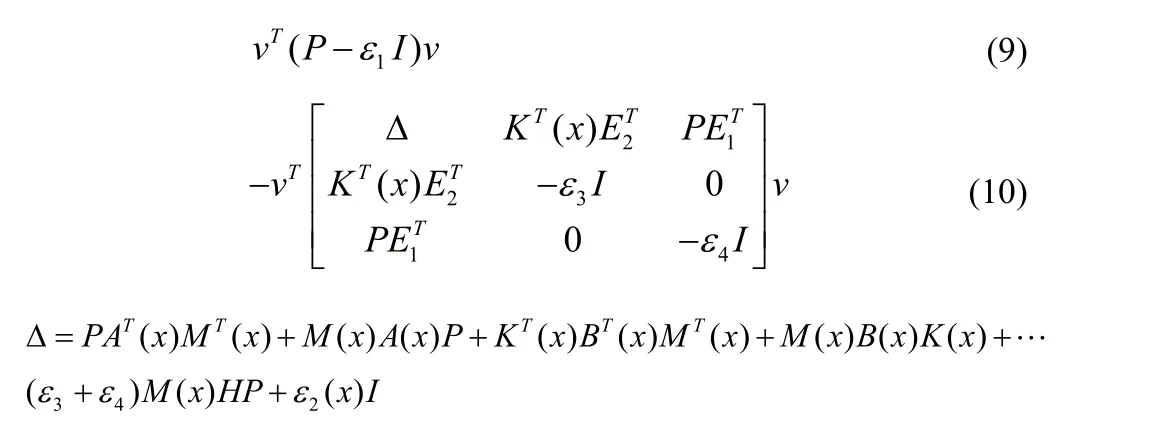
其中:v∈ℜN,则闭环系统是稳定的,控制器

是系统(3)的一个状态反馈控制器。若当x≠0,则ε3(x) > 0,那么闭环系统全局渐近稳定。
证明:假设存在对称常数矩阵P和多项式矩阵函数K(x)满足式(9),(10)。定义:

下面我们要证明V(x)是下面闭环系统的李亚谱诺夫函数。

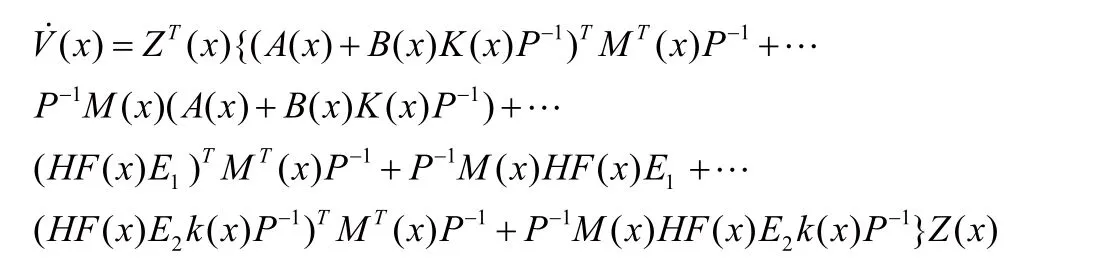
由引理2,条件(9)说明P和P−1对于所有的x都是正定的,所以V(x)也是正定的。沿闭环系统(12)的任意轨迹,V(x)的时间导数是:

整理上式,得:
利用引理4和5,可得:
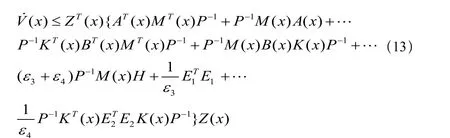
由(10)可知
其中,

是半负定的。利用引理6展开后,再左右同乘P−1,可得到式(13)是半负定的。因此(x)≤0,所以V(x)是该闭环系统的Laypunov函数,闭环系统(12)是稳定的。如果式(10)中,当x≠0,ε3(x) > 0 ,即V(x)的时间导数是负定的,闭环系统(12)全局渐近稳定。
3 仿真实例
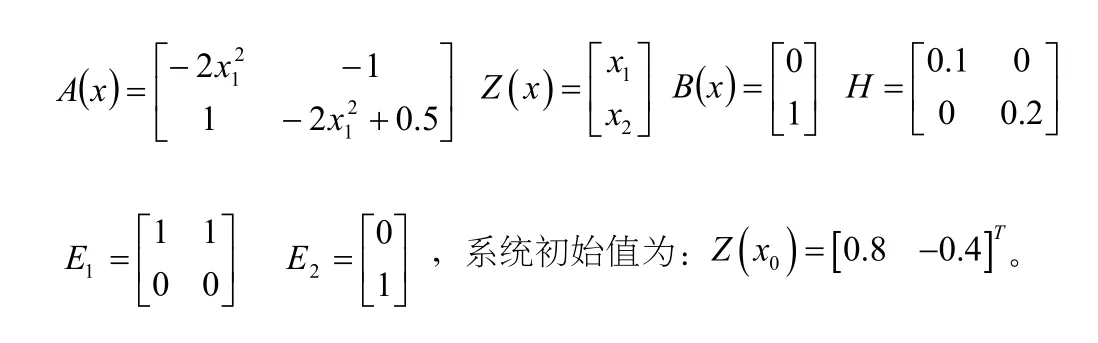
考虑如下不确定系统:
利用定理6设计状态反馈控制器,可得
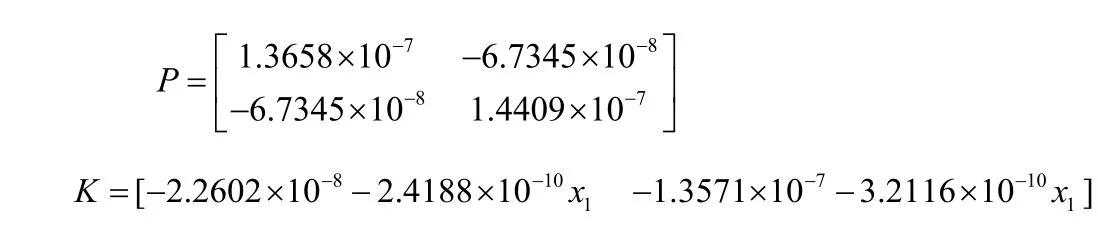
状态反馈控制器:

图1为闭环系统渐近稳定的系统状态向量的时间响应图。
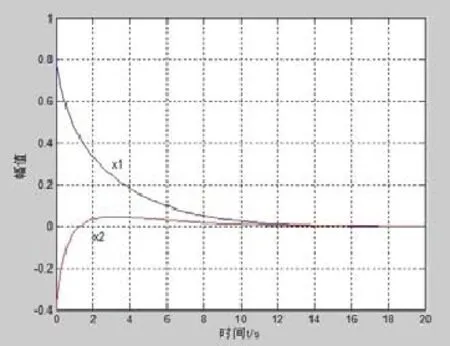
图1 系统状态向量的时间响应图
从图1中可以看出用基于SOS理论的方法设计非线性状态反馈控制器可以使不确定非线性系统达到稳定。
4 结论
针对一类不确定非线性系统,利用SOS理论结合Lyapunov函数的方法,给出了使系统稳定的非线性控制器设计方法。利用SOS理论方法不需要对原始模型进行过多的化简近似,得到的控制器是关于状态变量的多项式方程,便于工程执行。这弥补了以往设计方法中不能给出使系统有效的控制器设计和求解方法的不足。此外,采用的SOS理论方法弥补了LMI不能计算全局解的不足。仿真结果表明,本文提出基于SOS理论的状态反馈控制器设计方法是有效的。
[1]黄琳.稳定性与鲁棒性的理论基础[M].北京:科学出版社,2003.
[2]俞立.鲁棒控制——线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.
[3]Geromel J C, Korogui R H. Analysis and synthesis of robust control systems using linear parameter dependent Lyapunov functions[J].IEEE Trans on Automatic Control,2006,51(12):1984-1989.
[4]Oliveira Ricardo C L F. LMI conditions for robust stability analysis based on polynomially parameter-dependent Lyapunov functions[J].Systems and Control Letters,2006,55(2): 52-61.
[5]欧阳高翔,倪茂林,孙承启.基于依参数Lyapunov函数的不确定系统鲁棒稳定控制[J].控制与决策.2008,23(12):1432-1440.
[6]S. Prajna, A. Papachristodoulou, and Fen Wu. Nonlinear control synthesis by sum of squares optimization: a Lyapunov-based approach[C].Proc.of the 5th Asia Control Conference, 2004, pp. 157-165.
[7]Prajna S, Papachristodoulou A, Seiler P, et al. Sostools: Sum of squares optimization toolbox for Matlab[R].California: California Institude of Technology,2004.
[8]Parrilo P A. Structured semidefinite programs and semialgebraic geometry methods in robustness and optimization[D].California: California Institute of Technology,2000.
[9]S. Prajna, A. Papachristodoulou, and P. A. Parrilo. Introducing SOSTOOLS:A general purpose sum of squares programming solver[C].Proc. Of the 41st IEEE Conference on Decision and Control, Las Vegas, Nevada USA,2002,741-746.
[10] Sing Kiong Nguang, Minyue Fu. Robust Control of Systems with Both Norm Bounded and Nonlinear Uncertainties[C].Proceedings of the 32nd Conference on Decision and Control 1993:2561-2566
[11]L. Xie. Output feedback H∞ control of systems with parameter uncertainty[J].Int. J. Contr., 1996,63(4):741-750.
