工程塔机防碰撞技术之浅析
2012-01-04张友同
张友同
(莱芜市机关事业管理局,山东 莱芜 271100)
工程塔机防碰撞技术之浅析
张友同
(莱芜市机关事业管理局,山东 莱芜 271100)
随着塔机在现代化建筑施工过程中的广泛应用,塔机倾翻碰撞事故逐渐增多,对塔机防碰撞技术的研究与实现也成为当务之急。文章对近年来关于塔机防碰撞技术作一简介,阐述了进行塔机防碰撞研究的重要意义,对国内外塔机防碰撞技术进行了比较性研究分析,并展望了塔机防碰撞技术的下一步可能的发展方向。
塔机防碰撞系统;智能化;监控
1.前言
在当今社会,随着经济的发展、城市化进程的不断加快,高层、超高层建筑物大量涌现,塔机因其能将建筑构件或建筑材料准确吊运到建筑工地的任意部位、可以加快施工进度、减轻劳动强度、节省人力、缩短工期、降低工程造价等优点而在现代化建筑施工过程中的作用越来越大,已成为施工企业装备水平的标志性重要装备之一,并且为了提高工作效率,塔机也日益向大型化、高速化、智能化方向发展。
但是塔机在工作中蕴藏较多的危险因素,并且容易发生恶性事故。塔机是工作空间很大的起重机,它的起吊高度高、工作幅度大、行走范围也很大[1],并且由于城市建筑物越来越密集,大型建筑工地塔机的布设密度越来越大,多台塔机布置在同一现场、近距离交叉作业的情况经常会出现,塔机之间的碰撞以及塔机与周边建筑物碰撞的频率也随之增高,重大事故时有发生。一旦发生事故,轻则对设备部件造成损坏,重则发生机毁人亡的恶性事故。塔机的事故率远高于其它工程机械,据统计,全国每年发生塔机倾翻碰撞事故近百起,并且近年来重大事故率逐年上升,给人民生命财产造成了巨大的损失。
2.塔机碰撞情况分析
塔机在运行过程中发生碰撞主要有以下几种情况:高塔机吊臂在回转或吊钩下降过程中,高塔机吊钩或吊绳碰撞低塔机吊臂,同时引起货物脱落;塔机碰撞周围的建筑物,引起人员伤亡;低塔机吊臂在回转过程中碰撞高塔机塔身;塔机货物起落位置位于道路上方,在下降过程中货物碰撞路上车辆;塔机吊臂在回转过程中货物碰撞高压线;塔机在运输货物过程中货物脱钩,造成人员伤亡。下图1为塔机碰撞事故示意图:
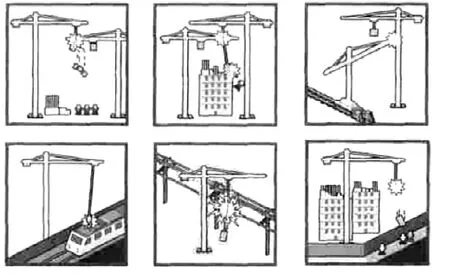
图1 塔机碰撞事故示意图
因此,如何避免塔机间及塔机与障碍物间的碰撞成为一个不能忽视的课题。研发一套能实时监控各塔机的运行状态,并在有碰撞危险时进行报警并紧急制动的塔机防碰撞控制系统具有十分重要的意义。
3.国内外塔机防碰撞技术的比较研究
为防止塔机发生碰撞,一些发达的国家地区先后出台了相应的法规,政府通过立法对没有安装防碰撞装置的建筑塔机不允许投入使用,要求相互干涉作业的塔机必须安装防碰撞系统,特别是法国、韩国等在此领域的起步较早,建筑塔机防碰撞系统应用比较成熟。法国1987年已出台了相应的法令法规;德国、美国、新加坡和韩国等国家也出台了相应的规定。我国目前尚无这方面的强制法规要求,但是国家建设部,各省市建设局都颁发了有关塔机安全操作的文件。
3.1 国外防碰撞技术现状
为了满足用户对控制系统各方面的需求,使塔机运行更安全、更平稳、更有效,世界各国都开始致力于以微型计算机为核心的塔机安全监控系统的研制开发。目前,发达国家的先进起重机无论在安全监控还是自动运行控制方面都具有比较高的水平。
德国LIEBHERR起重机,采用激光装置测量起吊重物的重心位置,依靠超声波传感器引导起物装置抓起货物;大车和小车运行采用编码导轨系统测定路径,提升高度采用恒定张紧的测量索和角度发生器测定;综合液晶数字显示装置和电子监测系统,不仅可以显示塔机工作过程各种参数的数字量,还可显示各参数变化的图形,使操作者准确判断塔机的工作状态、及时掌握塔机的工作区域限制情况,例如与高压线、与周围障碍物的距离[2]。LIEBHERR最近获得专利的“Sycratronic®”创新的控制系统,其附加功能之一就是动态防撞系统DACS,控制多台起重机同时运行,以防止塔机之间及塔机与固定障碍物之间的碰撞,确保塔机运行的最佳性能。
德国近年来为解决起重机吊重的防摇控制,开发了模糊逻辑电路的控制技术,用神经信息技术和模糊技术寻找开始加速的最佳时刻,将有经验司机实际防摇操作的数据输入系统,实现最优控制。模糊控制方式能确定实施自动工作的控制质量,将人们主观的模糊逻辑通过模糊集合进行数字化定量,再用微处理机实现,像熟练司机一样地自如操作,取得更高的效率和安全性。
20世纪80年代初,法国POTAIN公司首先研制出“MANPA”系统,并成功用于法国的核电站建筑工地,以后又研制了“Siz90P”系统。目前全球的建筑塔吊安全智能测控仪主要由法国SMIE公司提供,其技术先进,市场占有率高。SMIE公司推出的“AC30系统”主要特点是以网络拓扑的形式将每台塔机上的中央处理器连接起来,实时计算监控塔机间的相对位置,使塔机能以最佳的工作速度和相互安全的距离工作。当系统采用RS485网线连接时,最多可同时监控18台塔机,采用RAC2无线网络连接时最多可同时监控8台塔机。它采用电子控制,由塔机小车机构、回转部件处安装的传感器与控制系统网络变换电路及司机室显示屏等组成,在多台塔机工作的建筑工地,操作者可根据施工场地的具体情况和各台塔机在某一段时间内的工作范围,划分出各台塔机的工作允许区域与禁止区域,然后将禁止区域或塔机可能与其他物体相互碰撞的空间几何参数编程输入防撞系统,电子防碰撞装置根据输入的参数,控制塔臂的旋转范围从而预防碰撞事故的发生。但该系统还有集成化成度不高,各项设备过多,安装复杂;采用PLC技术,处理速度不高;人机交互性差;监控容量小;成本高等缺点[3]。
新加坡E-Build公司的最新产品TAC-3000(如图2)防碰撞系统以网络拓扑的形式将每台塔机上的中央处理器连接起来,通过实时监测每台塔机水平臂的对地运动后算出塔机间的相对位置,实现防碰撞功能,通过无线传输模块使同一施工环境下相互关联的塔机组成1个信息网络。该技术的特点是只监测自身的运动状态,而不涉及对周围障碍物的主动监测,根据预先规划的允许工作区域限制塔臂的旋转范围,预防碰撞事故的发生[4]。
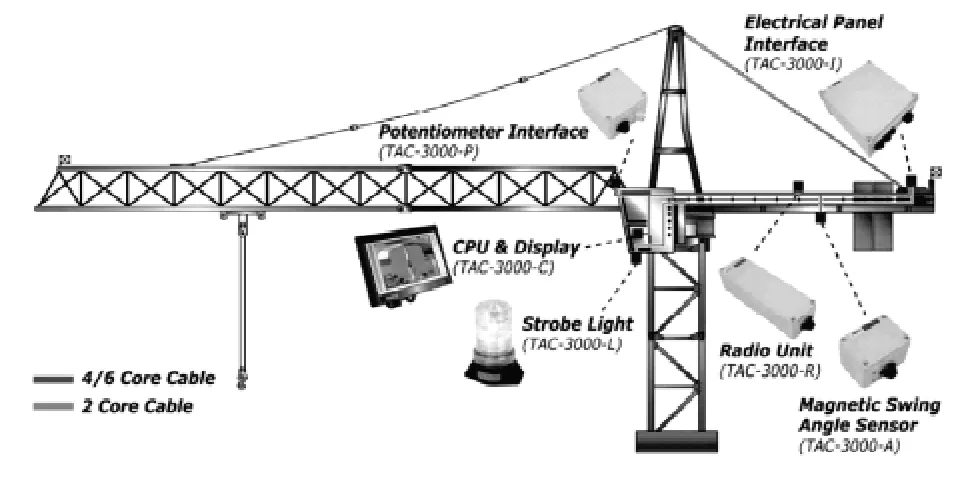
图2 TAC-3000防碰撞系统示意图
国外主要产品还有韩国WECON公司的ATC-10系统等。
3.2 国内防碰撞技术现状
国内的安全监控产品开发起步较晚,从80年代初,有关行业、大专院校、研究院所等单位对塔机防碰撞系统进行了研究、设计、生产,发展至今也已渐成规模。电子器件的发展,使目前国内防碰撞装置的产品技术水平上了一个新的台阶,但其主要性能与国外同类产品相比,仍有较大的差距。我国一些高校、科研院所及部分研发实力较强的制造企业也进行了很多关于塔机防碰撞系统的研发。如西安理工大学进行的基于多AGENT的塔吊防碰撞系统及基于CAN总线的塔吊防碰撞系统研究;哈尔滨工业大学的吕广明、李洪亮等通过齐次变换的方法来进行群塔防碰撞算法的计算研究;山东建筑大学的刘胜利、宋世军等以DSP为硬件处理核心,根据双目成像的几何原理通过左右两幅图像的匹配来获得物体的距离信息预防塔机的碰撞;浙江工业大学的陈帮、张洪涛等人研发了基于嵌入式linux的塔机群防碰撞控制系统,采用分布式控制模式,在决策的制定和任务的执行上表现出并行的特点,大大提高了问题求解效率;西安建筑科技大学的张亚磊、段志善等人首次从技术角度出发,结合塔机的结构以及工作环境恶劣等情况,提出了基于超声传感器和Kalman滤波的塔机防碰撞方法,并将其应用到塔机安全运行中[5]。
目前国内有很多开发塔机监控系统的制造企业。成都新泰起重安全系统有限公司的CXT/30A型塔机群防互撞及区域保护系统,实现了塔机防互撞、区域(障碍物)保护、分界区域保护、预报警及控制等功能。
西安智敏测控科技有限责任公司的ZM-ACS30塔吊群智能防碰撞报警系统(如图3)由报警控制器、角度传感器、幅度传感器、无线通信控制器等组成,它实现了交叉作业塔吊间的防碰控制、交叉作业区内工作塔吊的数目控制(最大组网数量16台塔机)、塔吊与周边楼宇的防碰控制、塔吊工作区域的范围限定、塔吊工作的限速控制和塔吊的力矩保护等6种功能,可通过安全状态指示灯、报警器、各自由度控制回路指示灯等直观示警装置指示工人现场操作,当有碰撞危险时,系统可自动切断塔机运行控制电路,降低塔机运行速度或停止塔机危险动作倾向[6]。

图3 ZM-ACS30塔吊群智能防碰撞报警系统
山东富友集团生产的塔机防碰撞系统(如图4),每台塔机上的主控单元在对自身状态(如回转角度、幅度位置)进行实时检测的同时,通过无线传输模块使同一施工环境下相互关联的塔机(最多20台)组成一个信息网络。每个塔机的状态信息可通过信息网在各塔机之间进行传递,每个塔机上的主控根据检测到的本机和其它塔机的信息,进行防碰撞计算,并根据结果进行报警或切断不安全方向动作。

图4 山东富友集团塔机防碰撞系统
3.3 国内外防碰撞技术的比较
国外塔机多用状态参数实时监控系统,已经有了很大的发展和广泛的应用,但是不同厂家的技术参差不齐,没有国际标准。近年来对塔机的安全保障系统的研究较少,塔机技术发展比较缓慢。
国内塔机制造企业有300多家,大多数缺乏研发能力,只能做系统集成,特别是缺乏新型的计算机信息技术的应用能力。与国外相比,国内有关建筑安全装置的研究仍有较大差距,工程机械单机智能化技术虽然比较成熟,但机群智能化技术则尚未完善[7]。在产品性能方面智能化、数字化控制与监控技术同国外相比差距比较大,在可靠性方面还有待提高。部分有研发能力的制造企业或科研院所所开发的塔机监控系统尚不完善,部分重要状态参数没有监控,仍然存在安全隐患,同时很多实测参数未用于改善安全控制策略,没能真正提高塔机智能自动的预防事故能力。现有的塔机远程监控系统中,机械的运行状态监控是各家软件共同关注的重点,表示形式虽然不尽相同,但基本都采用了“示意图+图例+数据”的形式进行呈现。这种模拟方式遮盖了大量的运行姿态和运行环境信息,监测视觉信息量非常有限,缺乏与用户的交互而且不够直观形象,不能满足现场施工对临场感和交互性的需求。
建筑塔机是动态运转的高空吊运设备,涉及塔机回转角度、臂长半径、吊钩高度、周边建筑物、不允许进入的公共地段等,塔机始终工作于三维立体环境中。因此,改进塔机防碰撞技术,对于单台塔机,由于工作只受周边建筑物的影响,一般采用限位器就可解决。然而,对于多台塔机群同时作业的建筑工地,要保证建筑材料的准确及时吊运到位,必有相互交叉作业的运行空间。所以,对于多台塔机防碰撞系统,不仅必须考虑每一台塔机布设区域坐标、摆臂、小车和吊钩的动态坐标参数以及各自的运动速度等因素,还要考虑各台塔机之间的组网通信问题,其中涉及各塔机的身份认证、自主进入、自主退出系统等因素和问题。为提高通信和防碰的实时性,还必须考虑数据压缩和解压缩问题等。为了方便安装和参数修改以及系统维护,更要考虑地面远程参数设置,包括塔机群网中每个塔机静态参数设置、塔机群网络全局参数设置、吊运禁行区类别设置以及系统整体参数配置等。
4.结语
从长远发展来看,研发一种经济适用的群塔作业的防碰撞装置,仍然是一个重要的研究课题。虽然国内外各生产厂家的塔机防碰撞技术正在日趋完善,但是在通信协议方面,不同厂家生产的产品缺少一个共同的通信标准,这大大限制了塔机防撞产品的通用性,同时在PLC可编程逻辑控制方面,还有很多工作需要我们去完善。
[1]陈一帆.基于PLC和触摸屏的塔机安全监控系统设计[J].湖南农机,2009,11:23-26.
[2]张瑜.基于嵌入式技术的塔机运行状态实时监测系统的研制[D].杭州:浙江工业大学,2009.
[3]魏全瑞,韩久强.基于无线网络的塔吊群防碰撞系统的研究[J].数学的实践与认识,2008(12):53-59.
[4]Singapore e-Build Innovations Pte Ltd.Presentation of Tower Cranes Anti-Collision,Boundary and Zone Protection System.
[5]张亚磊,段志善.基于超声传感器和 Kalman滤波的塔式起重机防碰撞研究[J].起重运输机械,2010(10): 31-34.
[6]李洪亮.群塔防碰撞算法与实验研究[D].哈尔滨:哈尔滨工业大学,2009.
[7]陈帮,张洪涛.基于嵌入式linux的塔机群防碰撞控制系统[J].机电工程,2011,3(3):346-349.
TH213.3
A
1008—3340(2012)02—0062—03
2012-03-01
张友同(1973-),男,山东莱芜人,莱芜市机关事业管理局工程师,大学本科,主要研究方向为机械工程,空调设计与施工。
