基于通信的列车控制系统中联锁功能的改变
2011-07-27于增明刘正东
于增明,刘正东
(1.信息产业部电子第六研究所,硕士研究生,北京 100083;2.北京和利时系统有限公司,工程师,北京 100176)
传统的计算机联锁系统是严格遵循计算机联锁技术条件或依据6502电气集中联锁的规则来设计的,它要求在进路办理时需要时刻检查诸多联锁条件都满足后才能开放防护该进路的信号机。如:不允许敌对进路同时办理成功;办理一次进路只对一个列车有效;当进路处于“接近锁闭”时,需要延时3 min或是30s才能解锁进路[1]。传统的联锁功能能够保证列车在运行过程中,不会出现由于道岔的任意转动而导致列车冲突、脱轨等事故,但是却不利于提高运营效率。
在城市轨道交通中,基于通信的列车控制系统(CBTC)以其能够有效缩短列车的追踪间隔、减少轨旁设备的数量、运营效率高等优点而得到很快发展。在该系统中,由车载系统检测列车的实际位置和速度,并将这些数据实时地发送给区域控制器(ZC),同时联锁系统将进路信息、道岔信息等也传送给区域控制器。区域控制器根据这几方面的信息,再综合一些线路静态数据,为每一列车计算移动授权(MA),并将移动授权发送给车载系统,车载系统依据移动授权计算列车运行的防护曲线,最终使得列车在列车自动防护系统(ATP)的监视下安全、高效地运行[2]。因此,传统的联锁逻辑不适合直接用于城市轨道交通。
1 联锁系统与其它系统的接口
在城市轨道交通中,传统联锁系统只与操作员站或列车自动监控系统(ATS)有接口,但是在基于通信的列车控制系统正常工作的情况下,联锁还需要和区域控制器进行通信。列车自动监控系统将行车计划发给区域控制器,区域控制器则根据每一列车的当前位置和列车的配置情况(通信列车与非通信列车配置不同,通信列车装备了能够和区域控制器进行正常通信的车载设备)向联锁系统发出进路请求命令,指示是否有通信列车正在接近,联锁为通信列车和非通信列车建立进路时进行的处理稍有不同(后面叙述)。
联锁与列车自动监控系统、区域控制器系统的连接,如图1所示。
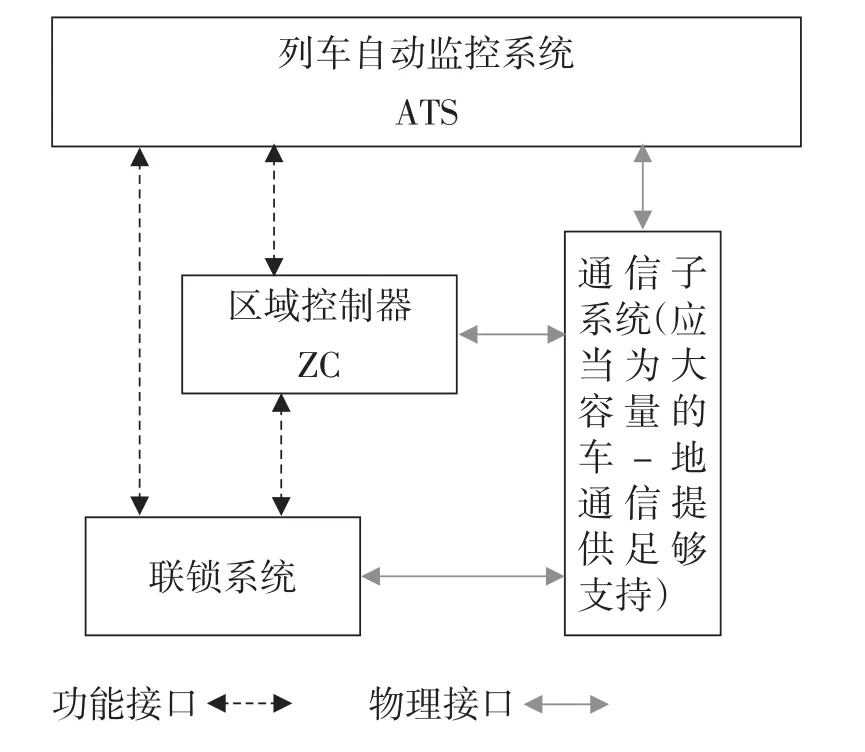
图1 联锁与外部系统的接口
联锁系统的功能与区域控制器的功能紧密相连,可由运营商根据实际的情况进行功能分配,必要的时候,联锁可以与区域控制器集成到一起,作为统一的轨旁系统使用[2]。如果联锁是作为独立的外部系统提供的,则通常还需要与屏蔽门系统、紧急关闭按钮等有接口,将现场设备的一些状态发送给区域控制器[3]。
2 排列进路
在基于通信的列车控制模式下,联锁为非通信列车建立进路的情况同传统联锁建立进路的过程完全一样,并没有本质的区别,都需要基于物理区段按照传统的联锁条件进行检查,在所有联锁条件检查通过后,锁闭进路并开放相应的防护信号机,此时列车按照信号机的显示运行。
当为通信列车办理进路时,联锁不检查区段的占用,也不检查进路的锁闭情况,但需要检查道岔的位置是否正确,并且要确保当道岔区段占用或锁闭时不能转动道岔,还需要检查一些其它的敌对条件,如确保敌对信号机未开放等。在该模式下通信列车的运行不依靠轨旁信号机的显示,而是依靠区域控制器给每列车计算的移动授权。因此,一个信号机防护的进路中可以允许多个通信列车同时追踪运行。
为通信列车排列进路时可以将进路延伸至非通信列车所占压的区段入口处,但是通常会更严格地限制为非通信列车所在进路的入口点,即通信列车的进路不允许侵入非通信列车的进路内。
2.1 区段占用情况 传统联锁系统通过采集区段的轨道继电器吸起、落下状态来判断区段是否有列车占用,并依据该状态信息进行进路的处理。
在基于通信的列车控制系统管辖区域内,车载系统会将列车自身的位置发送给区域控制器。因此,区域控制器会知道整个线路上所有通信列车的确切位置。如果安装了次级列车检测装置(轨道电路或计轴器),也可以提供整个线路内物理区段的占用、空闲情况。如此一来,联锁系统就可以从2个来源得到区段的占用、空闲状态,即通过轨道继电器检测到物理区段的占用状态信息和区域控制器检测的信息。这两者都可以作为联锁系统的安全输入数据而参与联锁运算。
特殊情况下,如果轨道继电器检测到区段占用,而区域控制器检测到区段空闲时,应当优先考虑使用从区域控制器来的数据。因为区域控制器会知道每个通信列车实际的位置,也就能够得知线路上哪个轨道区段是真正地被列车占用,而轨道继电器可能会由于一些外部因素(例如轨道电路短路、计轴受扰、继电器粘连等)导致检测的结果不准确,即某一处的区段占用可能不是由于列车占用造成的。由于区域控制器是安全完整性等级为四级的设备,因此它提供的信息是可信的。
2.2 信号机的显示 传统联锁对信号机的显示需要按照参考文献[1]中的要求进行处理。
在基于通信的列车控制模式下,联锁为非通信列车建立进路时,信号机的显示与传统联锁没有区别,但是为通信列车建立进路的信号机显示则完全是“多余”的,因为通信列车并不依靠信号机的显示来运行。联锁系统在排列好进路之后,输出开放信号机的指令,但是由于通信列车不根据信号机的显示行车,通常会由区域控制器给联锁发送对信号机的强制灭灯命令,即当进路排列成功后,信号机不开放。如此一来,又会引发另一种情况,即给人的感觉是信号机未开放,通信列车依然能够驶入信号机内方,为此又有另一种全线亮灯的制式,也就是说,即使列车已经驶入信号机内方,信号机也不关闭,依然显示其允许灯光。因此,通常系统运营时,全线的信号机都是灭灯或亮灯,具体使用哪一种制式由运营商来指定。
2.3 特殊进路 在基于通信的列车控制模式下,通常还会存在自动通过进路和自动折返进路2种特殊进路。
自动通过进路在列车通过后不进行“三点检查”自动解锁,而是仅仅关闭信号机的显示,当列车出清该进路后,信号机又重新“开放”,继续为下一列车服务,从而节省进路建立的时间。
自动折返进路主要在城市轨道交通的终点站或中间站进行列车折返作业时使用。当调度员设置了自动折返进路模式时,联锁系统建立牵出进路,待列车进入折返信号机(并置或差置)外方后,联锁系统自动触发建立折返进路。当列车完成折返作业后,联锁系统又再次自动办理牵出进路,为下一列车的折返作业作准备,直至调度员取消自动折返进路的属性为止。
3 解锁进路
3.1 总人工解锁 在传统的联锁逻辑中,当列车进路的接近区段占用时,进路处于“接近锁闭”,此时如果想要取消该进路,则需要办理人工延时3 min解锁。在延时的过程中,进路不能解锁,此时即使列车已经停下来,联锁系统也要一直等到所设定的延时时间到达后才会将进路解锁。对于行车密度大、要求高运营效率的城市轨道交通来说,这一时间指标几乎是不可接受的。
和国有铁路干线的重轨系统不同,城市轨道交通系统中列车运行速度通常不大于100 km/h。因此,它的总人工延时解锁的时间可以适当的缩减。具体缩减的时间指标应当由运营商根据列车制动性能、线路信息等给出。非通信列车进路的解锁条件需要和传统联锁逻辑一样来处理。
3.2 提前解锁 传统的联锁不允许列车进路(非坡道提前解锁进路)提前解锁。
对基于通信的列车控制系统区域内的通信列车来说,允许联锁系统根据列车位置来取消进路。车载系统会根据列车配置、设备响应时间、通信延迟时间等建立一个列车安全制动模型,基于该模型可以计算出列车以当前速度,在最坏的情况下进行常用制动至列车完成停下所需要的最大制动距离,也就是说车载系统能够保证在该距离内将列车完全停下来[2]。
如果列车当前位置到信号机的距离大于制动距离,说明列车完全可以在信号机前方停下,此时,区域控制器会给联锁发送一个指示,允许联锁立即解锁该进路。这时候即使进路处于传统意义上的“接近锁闭”,解锁该进路也是安全的,它不会导致危害的发生。系统会重新排列其它的运行进路,从而提高了整个线路上的运营效率。
4 结束语
在基于通信的列车控制系统中列车依据各自的移动授权追踪运行,一般不需要由轨道电路或计轴器来检测列车的占用情况,也无需设置轨旁信号机。但为保证系统故障后依然能够进行一定程度的运营,通常还是会选择在线路上安装一定数量的信号机和划分闭塞分区,此时整个系统运营需要降级。
基于通信的列车控制系统中的一些联锁功能已经“违背”了计算机联锁技术条件的规定,但这并不是说联锁系统不再是安全系统了,而是由于其它的一些系统(如区域控制器)接管了某些功能,从而可以弱化联锁系统的检查条件。由于这些系统同样也达到了最高的安全完整性等级,因此也就有理由相信它的功能是安全的。
[1]中华人民共和国铁道部.TB/T 3027-2002计算机联锁技术条件[S].2002
[2]IEEE Sdandard for Communications-Based Train Control(CBTC)Perfor移动授权nce and Functional Requirements,IEEE Std 1474.1TM-2004
[3]凌祝军.CBTC系统中的联锁技术研究[J].铁道通信信号,2009,45(9):12-14
