大功率12脉整流电路仿真
2011-07-03卢芳徐谞程鹏
卢芳 徐谞 程鹏
(哈尔滨工程大学自动化学院,哈尔滨 150001)
在工业领域内,为获得直流电源大都采用整流技术。在生产力的迅猛发展下,整流装置的功率也日益增大。在现代轧钢厂日益广泛采用可控整流装置来驱动直流电机,其容量高达数万千瓦,容易引起交流侧的高次谐波[1]。为提高输出电压的质量,减轻整流装置对电网的影响,可采用多重化整流电路,即按一定规律将两个或多个相同结构的整流电路进行组合而得。将整流电路进行多重连接可以减小整流输出电压的脉动程度,减少交流侧输入电流的谐波,提高功率因素[2]。其中,采用12脉波整流电路尤为多见。
本文研究的大功率整流装置极其容易引起交流侧的高次谐波。为了减轻整流装置对电网的影响,可以采用12相及以上的多相整流电路。
本文基于12脉波整流原理,于Matlab-Simlink平台下搭建施加PI控制电路的仿真模型,比较了开环、闭环下仿真结果。并模拟部分电路中可能出现的非正常工况,搭建模型进行仿真,检验控制方法有效性。
1 脉波整流电路原理
本文采用由两个三相全控桥式整流电路移相30°串联联结而成的12脉波串联整流电路,如图1所示。其中,T1和T2为两组串联的整流桥;其二次侧的绕组a2,b2,c2和a3,b3,c3分别采用Y形和△形联结,构成30°相位差的两组电压,而△形联结的变压器二次绕组相电压为星形二次绕组相电压的 3倍,这样两组交流电源的线电压相等。由电力电子相关知识可知负载侧电压与变压器二次侧电压关系[3]为:

其中,Ud为负载侧直流电压平均值,U2为变压器二次侧相电压有效值,α为晶闸管触发角。
针对PID控制具有结构简单、稳定性能好、可靠性高等优点,本文采用PI控制器。带有PI控制电路的闭环12脉整流电路原理如图2所示。

图1 12脉波串联整流电路原理图

图2 闭环12脉整流电路原理图
3 脉波整流电路仿真搭建
该仿真电路在Matlab2008b环境下搭建。
3.1 开环电路
串联12脉波整流电路主电路由三相对称交流电压源、整流变压器、晶闸管整流桥、同步脉冲触发器、RLC负载等部分组成。同步脉冲触发器与晶闸管整流桥是不可分割的两个环节,两个晶闸管整流桥串联联结给负载供电,在Simulink环境下串联12脉波整流电路的仿真模型见图3。
3.2 闭环电路
为达到既定电压质量指标使负载侧输出电压平均值恒定在1000 V左右,暂态电压范围不超过正负15%,需对电路施加控制。本文采用Simulink中固有模块数字PI调节器,在MATLAB环境下对其进行仿真。控制方法是于电路中引出反馈量,将之与理想给定量比较得出误差。误差量传给PI调节器进行调节,调节后反馈给控制量[4]。
选定反馈量及控制量是首先要考虑的。虽然需要控制的是电压,但由仿真电路图可知,电压的调节全由给定脉冲决定。又因为控制对象为平均电压,所以在仿真过程中有将测得的瞬时电压转换为平均电压的问题,以及连续量与离散量的相互转化问题等等,在此不一一赘述。带PI调节器的12脉整流电路仿真拓扑结构如图4所示[6]。
4 仿真结果
4.1 开环状态
图5和图6为500 kW整流装置开环运行状况下触发角分别设置成0°和30°时的仿真波形。图中上部分为整流后负载侧电压波形,而下部分为变压器二次侧两种不同连接方式的线电压波形。由图可看出变压器副边线电压相位分别相差30°,负载侧电压脉动正常,一个周期脉动12次。此种情况下,可由公式(1)计算出负载侧电压平均值。此时波形与实际理想状况下波形图完全一致,表明了构建模型的正确性。

图3 串联12脉波整流电路仿真模型
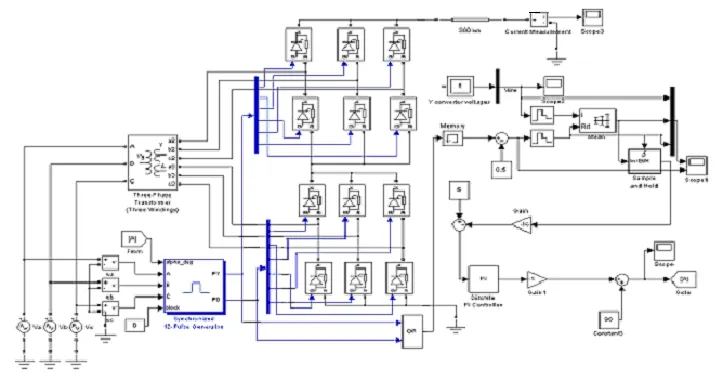
图4 带PI调节器的12脉整流电路仿真模型

图5 开环状态下α=0º时电压波形

图6 开环状态下α=30º时电压波形
4.2 闭环状态
在开环基础上加入PI调节器构成闭合回路,来减小乃至克服遭遇扰动时对整个电路造成的影响。在正常工况下仿真结果如图7,两个波形分别表示负载侧电压平均值和负载侧电压瞬时值。由图7可见,系统由启动到稳定状态的过渡过程较短,在0.04 s之内能够完成。系统达到稳定状态之后,负载平均电压维持在1000 V,瞬时值一个周期脉动12次,且12次脉动波形基本一致。此仿真波形表明所设计的主电路及控制电路模型合理,能够达到稳态的基本要求。
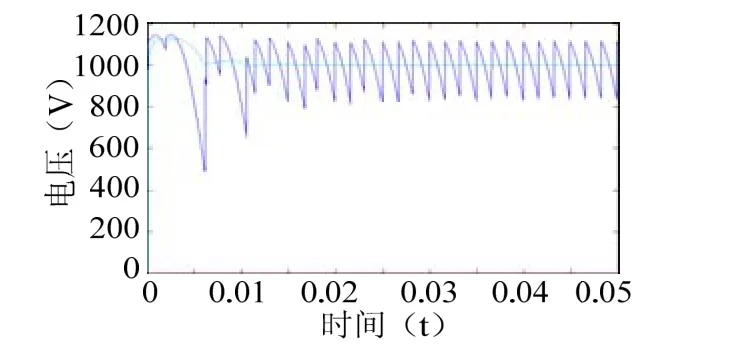
图7 闭环状态下负载侧电压波形
4.3 一相电源频率发生瞬时波动
由图7可知,系统于0.04 s已由启动状态过渡到稳定状态,待系统稳定运行后,于0.02 s将变压器原边A相电源频率由50 Hz突变为50.5 Hz,变化幅度1%,后于0.3 s回复至正常状态。此时相当于一相电源频率发生了瞬时波动。仿真模型见图8。
图9为对应的负载电压变化过程仿真波形,由图可见,在扰动消失时,只经过大约0.02 s,系统即可恢复正常状态。表明控制系统对这种瞬时的频率扰动具有一定的调节能力。
4.4 一相电源电压幅值发生瞬时波动
同样,系统稳态运行条件下,在0.2 s时,A相电源电压幅值由400 V上升到420 V,升幅5%,在0.3 s时恢复原值。此一相电源电压幅值发生瞬时波动时,仿真波形如图10所示。由图可见,在扰动消失后,系统状态在0.02 s内立即回复。同频率的扰动相似,也就是说控制系统对这种瞬时的电源扰动具有一定的调节能力。
4.5 由空载到满载时系统的调节过程

图8 一相电源频率瞬时波动仿真模型
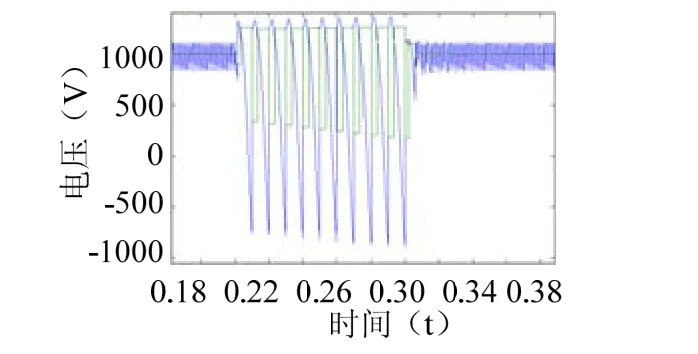
图9 一相电源频率瞬时波动负载侧电压波形

图10 一相电源电压瞬时波动负载侧电压波形
图11为负载大小突然发生变化时对应的仿真原理图。通过开关的选择与计时器实现负载由空载到满载的转换。理想空载时,因回路中没有电流,晶闸管不会被触发导通,电路无法正常工作。故在模拟空载运行时,将负载变成了阻值非常大的负载,电流非常小,但大于维持电流以维持晶闸管导通。这里将负载阻值增加到了2000 Ω模拟空载状态。设置空载到满载的转换时刻为0.2 s。
图12为空载到满载时仿真波形图。由图可知,PI调节器的调节过程很快,负载变化时,很快就能达到新的稳定状态。
5 触发脉冲异常解决方案
在初步仿真结果出来后,按仿真模型思想搭建硬件实物平台。在实际试验中发现一个软件仿真中未遇到过的问题:触发脉冲丢失。为此,在仿真电路中模拟这种实际情况,并通过仿真解决这一问题。
通过分析,触发脉冲丢失的原因是:在仿真电路中的脉冲触发器为理想触发器,为了保证晶闸管正常有效导通,理想触发器在零时刻就给出12个晶闸管的初始脉冲。而在实际情况下,在零时刻时脉冲就以30°为间隔按照晶闸管导通顺序将脉冲信号依次送达。两种情况下的脉冲情况如图13,图14所示。
由于12脉串联整流电路导通条件是:两组三相桥上下桥臂各有一只晶闸管导通,即要求在某一时刻同时有4只晶闸管导通,才得以构成回路导通。而当脉冲为非理想脉冲时,当给上一组三相桥给定触发脉冲时,下一组三相桥的触发脉冲还没有来临,构不成回路,没有电流流过上一组晶闸管;当下一组桥触发脉冲来的时候,上一组桥的触发脉冲已消失,因此电路不能正常维持下去。
解决该问题有两种方案。方案一:增大阻容吸收回路的电容参数。当电容增大时,其两端电压维持在一定水平,因此可以为先触发的并联晶闸管提供一定的电流,只要这个电流大于维持电流,晶闸管就可以维持导通的状态,直到后两个晶闸管被触发导通,一起构成回路,正常工作。通过改变电容参数进行仿真,发现对于500 kW的这个整流装置,只有当电容增至法数量级时才可保证器件的正常开通。而实际上电路的电容在微法级才更合适。若阻容参数太大,由于电阻消耗有功功率,电容消耗无功功率,也会降低整个电路的效率及功率因数。方案二:在上下两桥分别并联一大电阻。当上桥两只晶闸管开通后,可以和并联的电阻构成回路,进而产生电流以维持晶闸管的导通,直至下桥的两只晶闸管也被触发导通,4只晶闸管通过负载构成正常回路。并联电阻阻值大小应使回路中产生的电流大于维持电流。在实际试验中采用了第二种方案,使整流装置得以正常运行。

图11 负载变化仿真模型
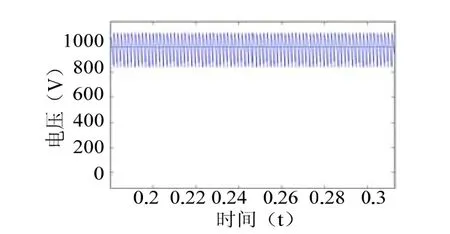
图12 空载到满载时负载侧电压波形图

图13 理想脉冲

图14 非理想脉冲
6 结束语
本文在Matlab-Simulink环境下完成了负载功率为500 kW,带控制回路的串联12脉波整流电路仿真。并模拟部分电路中可能出现的非正常工况进行仿真,验证了控制方法的有效性。实验结果表明该控制方法简单可行,经控制电路后的整流电路输出电压满足既定质量指标。
[1]张文斌, 靳希. 12脉波整流电路MATLAB-Simulink仿真及谐波分析[J]. 华东电力, 2008,36(4).
[2]陈坚. 电力电子变换和控制技术[M]. 北京: 高等教育出版社,2002.
[3]黄俊, 王兆安. 电力电子变流技术[M]. 北京: 机械工业出版社, 1992.
[4]仇慎谦. PID调节规律和过程控制[M]. 江苏: 江苏科学技术出版社, 1987.
[5]刘金锟. 先进PID控制MATLAB仿真[M]. 北京: 电子工业出版社, 2007.