鱼雷直流电机斩波调速系统设计
2011-07-03雷毅何万国
雷毅 何万国
(海军驻中国舰船研究设计中心军事代表室, 武汉 430064)
1 引言
目前我国电动鱼雷推进直流电机均采用双速制方式,利用电池组的串并联实现鱼雷两种速度的航行[1],这种方法的主要缺陷是由于无法实现鱼雷航行中机动变速,既不能实现鱼雷弹道的最佳控制性能,也不能最大限度地利用有限的能源增大鱼雷航程,难以满足日益需求的鱼雷战术要求。而电动鱼雷采用无级变速,使鱼雷在线导阶段,操作者可根据噪声掩盖和目标运动情况实时改变航速,以保证对目标的稳定跟踪;在自导阶段,鱼雷根据目标状态、目标信号强度和鱼雷自噪声等原因自动调整航行速度,可以获得最佳的战术攻击效果,并能有效地利用鱼雷能源,提高鱼雷航程。因此,实现电动鱼雷的无极变速,成为世界各鱼雷生产国投入大量的财力,进行该项鱼雷高新技术的开发和研究。
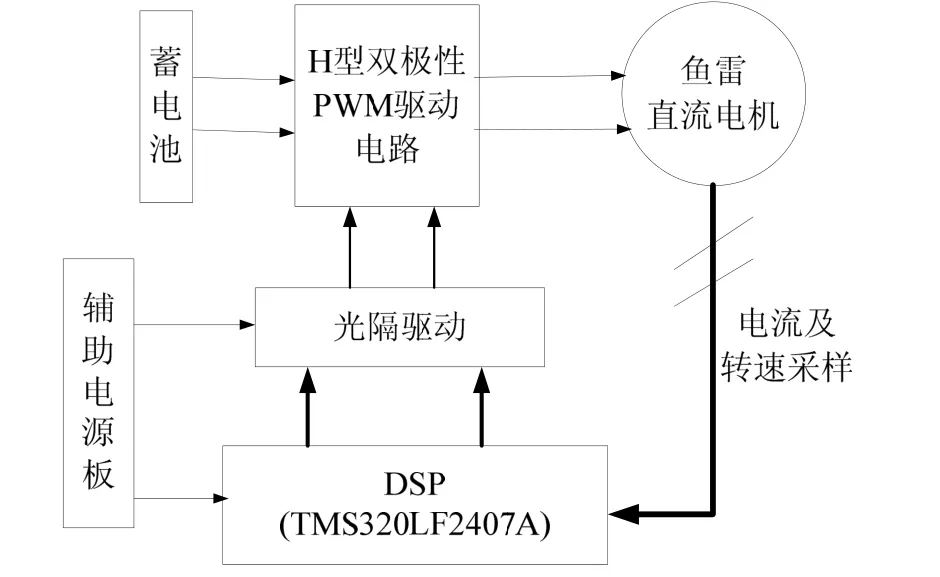
图1 鱼雷推进电机斩波调速系统结构框图
文中提出的鱼雷推进电机斩波调速系统是采用TMS320LF2407A为控制核心、H桥式直流斩波驱动、电流内环 PI调节与转速外环 Fuzzy-PI调节及转速电流测量等环节的微机控制双闭环调速系统[2]。图1为鱼雷推进电机直流斩波调速系统结构框图。鱼雷电池组作为斩波器直流电源,其电功率通过斩波器和电机转换为鱼雷运动的机械功率,由IGBT构成的桥式斩波电路将蓄电池的直流电斩波成电压连续可调的直流电,供给鱼雷推进电机使用。根据鱼雷转速变化的要求,实时调整斩波器的占空比,改变鱼雷电机的输入电压,进而改变鱼雷电机的转速,实现鱼雷的变速航行,提高鱼雷的战术性能。
2 调速系统控制方案
直流电动机的转速正比于电枢端电压U,故控制U就可以控制转速n。图2是H型双极性可逆PWM驱动系统[3]。四个开关管分成两组,VT1和VT4为一组,VT2和VT3为一组。一组的开关管同步导通或关断,两组的开关管的导通与关断正好相反。
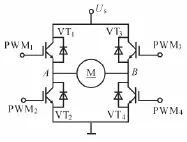
图2 H型双极性可逆PWM驱动系统
在每个PWM周期里,当VT1和VT4导通时,VT2和VT3截止,电枢绕组承受从A到B的正向电压,反之电枢绕组承受从A到B的反向电压。由于在一个PWM周期里电枢电压经历了正反两次变化,因此其平均电压

由(1)可见,双极性可逆PWM驱动时,电枢绕组所受的平均电压取决于占空比D大小。当D=1时,Ua=Us,电动机正转且转速最大;当D=1/2时,Ua=0,电动机不转,虽然电动机不转,但电枢绕组中仍有交变电流流动,使电动机产生高频振荡,这种振荡有利于克服电动机负载的静摩擦,提高动态性能;当D=0时,Ua=−Us,电动机反转且转速最大。
3 控制系统硬件设计
设计中选用主控芯片TMS320LF2407A是专门为电机的数字化控制而设计,特别适合于桥式直流电机的高性能控制[4]。图3为控制系统硬件设计框图。通过 DSP的 PWM输出引脚PWM1-PWM4输出的控制信号进行控制。采用增量式光电编码器与电机相连,电动机旋转时编码器产生脉冲,由光电编码盘接口(QEP)进入DSP通过对脉冲进行计数,获得速度反馈信号。电流检测回路采用霍尔电流传感器检测电流变化,通过ADCIN00引脚输入给DSP,经A/D转换产生电流反馈信号。获取给定速度后,DSP计算出PWM 占空比,输出 PWM 信号经光耦合驱动IGBT桥[6],电动机将根据要求的速度转动。
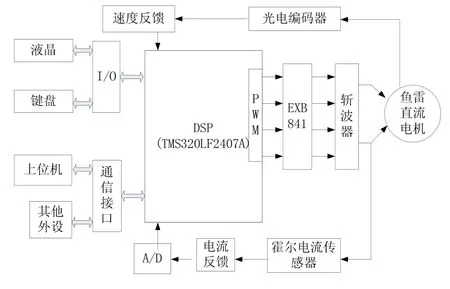
图3 PWM双闭环直流调速系统硬件框图
3 软件设计
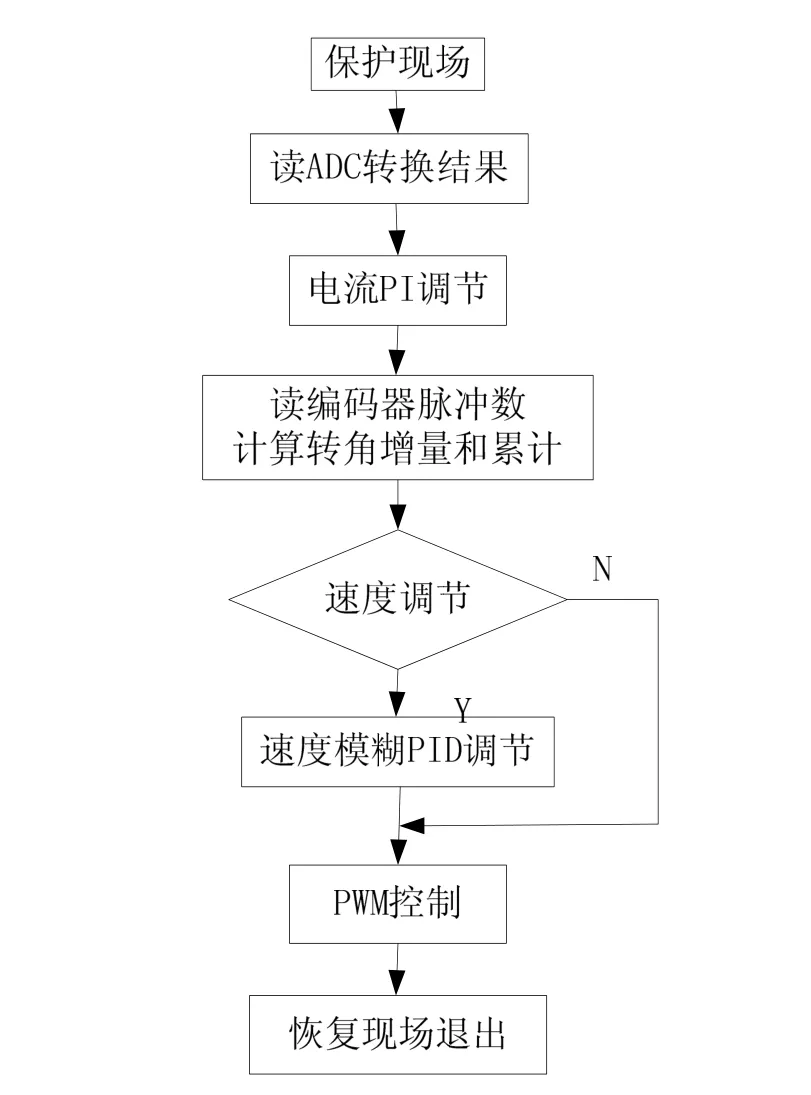
图4 ADC中断处理子程序框图
采用 DSP实现直流电机调速控制的软件由初始化程序、主程序和中断子程序等组成。初始化程序主要有系统时钟初始化、SCI模块初始化、PWM 初始化、电流电压采样初始化、速度采样初始化、系统变量初始化等。采用定时器1周期中断标志来启动A/D转换,转速结束后申请ADC中断,图 4是 ADC 中断处理子程序框图。全部控制功能都通过中断子程序来完成。在每个PWM周期(50 µs)都进行一次电流采样和电流PI调节,因此电流采样周期和PWM周期相同,以实现实时控制。由于速度时间常数较大,在本程序中设计每90个PWM周期(4.5 ms)对速度进行一次调节[8]。速度外环采用模糊自整定PID调节器,其模糊自整定PID参数程序是在定时器T1中断服务程序中完成,图5是PID参数自整定程序框图。
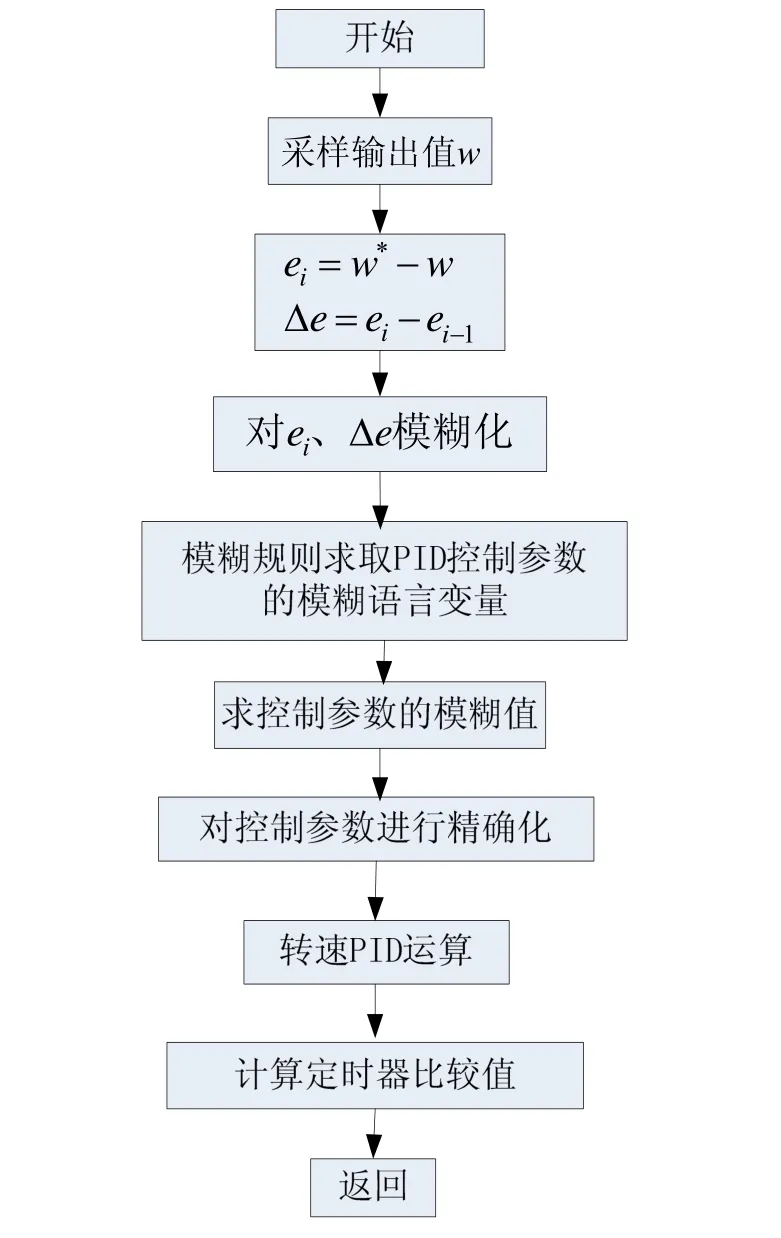
图5 PID参数自整定程序流程
4 实验结果
为检验鱼雷直流斩波调速系统设计能够实现无极变速,具有良好的动态和静态性能,本系统的实验是在一台30 kW直流电机上进行的,实验所用负载为一台电涡流测功机。系统上位机采用可靠性较高的工控机,与主控DSP通讯部分采用的是 CAN 通讯模式。系统使用LabWindows/CVI6.0软件开发了上位机的控制软件。实验结果如下:
图6为电机从0加速到500 rpm时速度响应曲线,从图中可以看到过渡时间仅为0.2 s。
图7为电机从0加速到1000 rpm时速度响应曲线,从图中可以看到过渡时间仅为0.3 s。
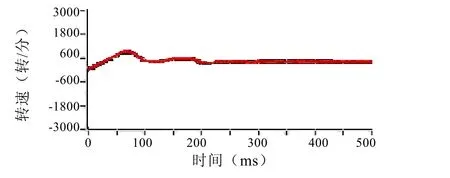
图6 电机从0加速到500 rpm时速度响应曲线
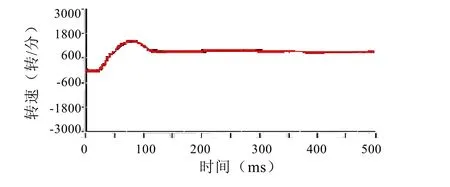
图7 电机从0加速到1000 rpm时速度响应曲线
图8为电机从0加速到2000 rpm时速度响应曲线,从图中可以看到过渡时间仅为0.45 s。
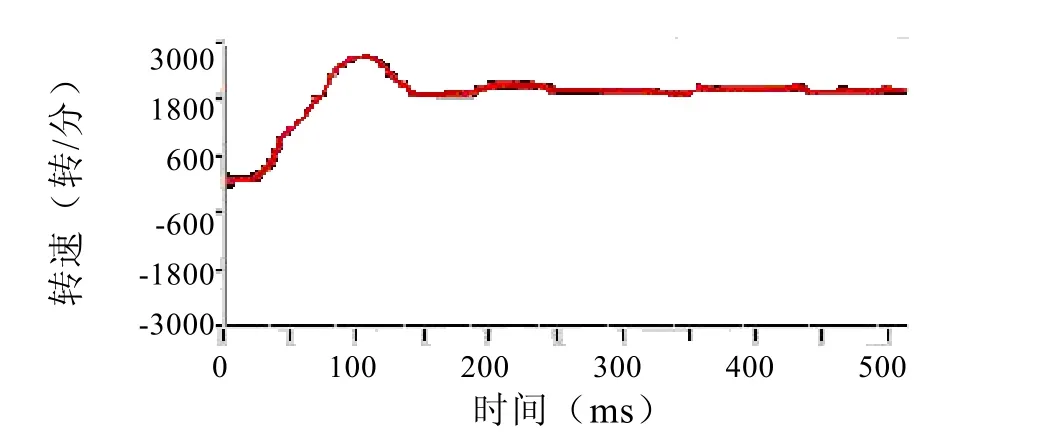
图8 电机从0加速到2000 rpm时速度响应曲线
图9为电机从1000 rpm减速到0时速度响应曲线,从图中可以看到过渡时间仅为0.26 s。
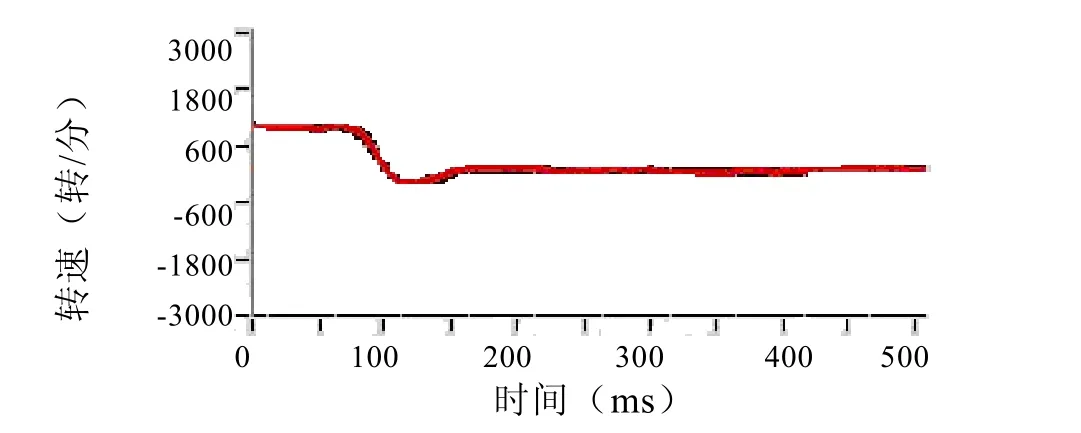
图9 电机从1000 rpm减速到0时速度响应曲线
试验结果表明实验系统响应速度快、变速冲击小、运行稳定,具有良好的动静态性能。
5 结束语
针对目前我国电动鱼雷主要采用电池组的串并联实现鱼雷二种速度的航行,其主要缺陷是变速过程冲击大,调速范围窄,难以满足鱼雷战术要求的特点,本文进行了鱼雷直流斩波调速系统的研究。该系统以TMS320LF2407A为控制核心,主电路采用H桥式直流斩波驱动和转速、电流双闭环调速。电流环作为内环使用PI调节转速环作为外环使用Fuzzy-PI调节。经实验室模拟负载试验,结果表明该系统具有损耗和发热量小,节约能源,噪音低,响应速度快,变速时冲击小,运行稳定等优点。
[1]谢顺依, 刘小虎. 鱼雷推进电机斩波调速装置研制[J]. 鱼雷技术, 2005.9.
[2]卢文生, 宋虎. 基于 DSP的直流斩波调速模糊控制器[J]. 黑龙江科技学院学报, 2008.1.
[3]王晓明, 王玲. 电动机的 DSP控制-TI公司 DSP应用[M]. 北京: 北京航空航天大学出版社, 2004.7.
[4]林立, 唐旭等. 基于 DSP的 PWM双闭环直流调速系统[J]. 微电机,2007.4.
[5]Astrom,K.J. Hagglund. The future of PID control[J].Control Engineering Practice, 2001, 9(11):1163-1175.
[6]王兆安, 黄俊. 电力电子技术[M]. 北京: 机械工业出版社, 2009.6.
[7]Leonhard, W. Control of electrical drives 3rd ed.Springer Verlag, 2001.
[8]江思敏. TMS320LF240X DSP硬件开发教程[M]. 北京: 机械工业出版社,2003.