信号交叉口机动车尾气排放总量估算模型研究
2022-08-09李嘉智
李嘉智
(广东旭诚科技有限公司, 广东 广州 510260)
车辆到达信号交叉口时,如果受到红灯信号的阻滞作用,车辆将经历加减速甚至停车等待的过程,产生的污染物排放量显著增加,单一地以车速作为车辆尾气排放量计算参数进行测算,已不能满足信号交叉口尾气排放的计算要求,需研究更准确、全面的信号交叉口机动车尾气排放估算方法。文献[1]综合考虑车辆的污染物排放量、燃料消耗量与交叉口延误,分析了信号配时方案优化对减少排队延误与尾气排放的作用。文献[2]将车辆巡航状态分为空转、加速、减速和定航,提出了一种基于动力学的排放估算模型。文献[3]将TRANSIMS的VT-微观模型和遗传算法相结合对交通走廊进行信号优化,有效地减少了全网燃油消耗、车辆排放量及行程时间。文献[4]针对协调控制路段与无协调控制路段,对比分析了车辆在加速、减速、匀速、怠速等工况下的尾气排放水平与分布规律。文献[5]根据捷达汽车在实际道路上行驶时的排放数据,建立了NOx、CO、HC等尾气污染物在车辆怠速与匀速行驶状态下的瞬时排放率回归模型。
比功率法是评估交叉口机动车尾气排放的常用方法。美国国家环境保护局利用基于比功率的MOVES排放模型,通过对不同车型、发动机排量、行驶里程机动车的调查,开发了一款功能齐全的机动车尾气排放模拟软件。文献[6]将VISSIM与MOVES相结合,分析了相邻交叉口协调控制对机动车尾气排放量的影响。文献[7]分析了不同行驶速度对车辆比功率分布的影响,提出了基于平均行程速度的比功率分布数学模型。文献[8]根据排队车辆的减速、怠速、加速工况,采用比功率法建立了定量估计交叉口排队车辆尾气排放总量的反推估计方法。基于比功率的机动车尾气排放研究虽有不少,但大多数只对信号交叉口尾气排放进行定性分析,很少对信号交叉口车辆排放总量与信号控制效益(如延误时间、停车次数)之间的相关性进行定量分析。该文在基于比功率的车辆排放模型的基础上,通过分析不同工况下尾气排放特征,研究基于控制运行指标的信号交叉口机动车尾气排放总量估算模型。
1 基于比功率的尾气排放模型的计算原理
1.1 比功率
由汽车动力学可知,机动车在运动过程中的能源消耗、污染物排放与车辆的功率输出密切相关,而机动车比功率是汽车发动机瞬时输出功率与汽车质量之比,与车辆的瞬时速度、加速度及道路坡度等直接相关,可通过比功率将车辆的瞬时运行状态与尾气排放联系起来,计算车辆在整个行驶过程中的尾气排放量。典型轻型车的比功率计算公式为:
PVSP=v(1.1a+0.132 1)+0.000 302v3
(1)
式中:PVSP为比功率值;v为瞬时速度(m/s);a为加速度(m/s2)。
由式(1)可知:车速为零时,比功率为零;加速度为正时,比功率为正;加速度为负时,比功率可正可负。
1.2 基于比功率的排放模型
基于比功率的排放模型将车辆运行工况划分为不同区间,每个比功率区间都有其各自的排放率。根据车辆的瞬时速度与瞬时加速度可算出瞬时比功率值;然后计算车辆在各比功率区间的工作时间,再乘以比功率区间对应的尾气排放率,可计算出车辆在整个运动过程中的尾气排放量;最后将各车辆的尾气排放量相加,得到整股车流的尾气排放总量:
(2)
式中:E为车流的尾气排放总量(g);i为车辆序号,i=1,2,3,…,N;N为车流车辆数;j为比功率区间序号,j=1,2,3,…,ni;ni为第i辆车所经历的比功率区间总数;tij为第i辆车处于比功率区间j的时间长度;Rj为比功率区间j下的污染物排放率(g/s)。
比功率区间的划分间隔直接影响机动车尾气排放量的计算精度。根据MOVES排放模型的试验拟合数据,以发动机排量小于3.5 L、最大行驶里程大于10万km的小汽车为例,不同比功率区间对应的CO、CO2、NOx、HC尾气排放率见表1。
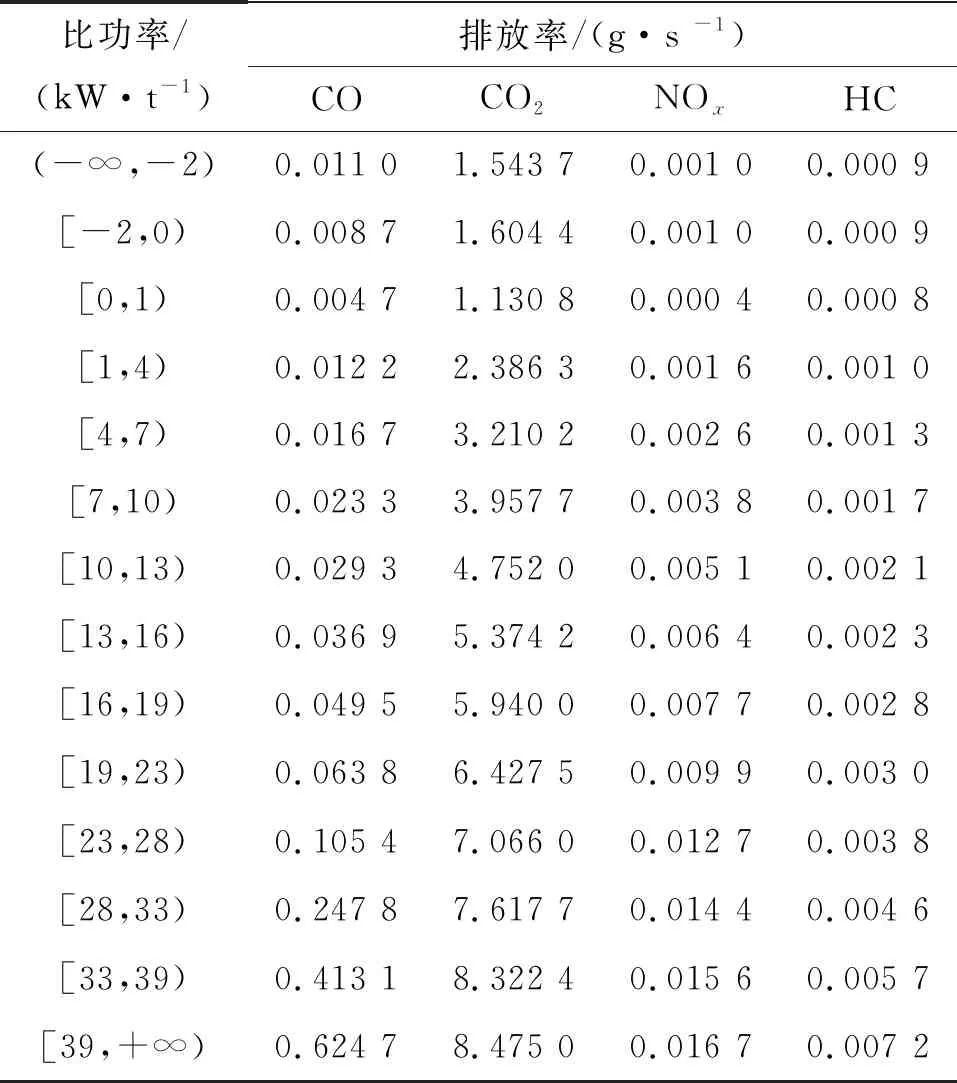
表1 不同比功率区间小汽车CO、CO2、NOx、HC的排放率
2 基于比功率的尾气排放特性分析
采用VISSIM交通仿真软件模拟一股行驶速度为10 m/s的车流通过信号交叉口的过程,利用式(2)计算车流在交叉口的尾气排放量,并根据车辆的行驶数据与排放量分析车流在不同行驶工况的排放特性。
通过VISSIM的*.Vehicle Record评价文件可获取车辆的编号、瞬时速度、瞬时加速度、行驶距离等运行数据。筛选出一个信号周期内通过交叉口的行驶车辆,形成图1所示车辆运行轨迹。
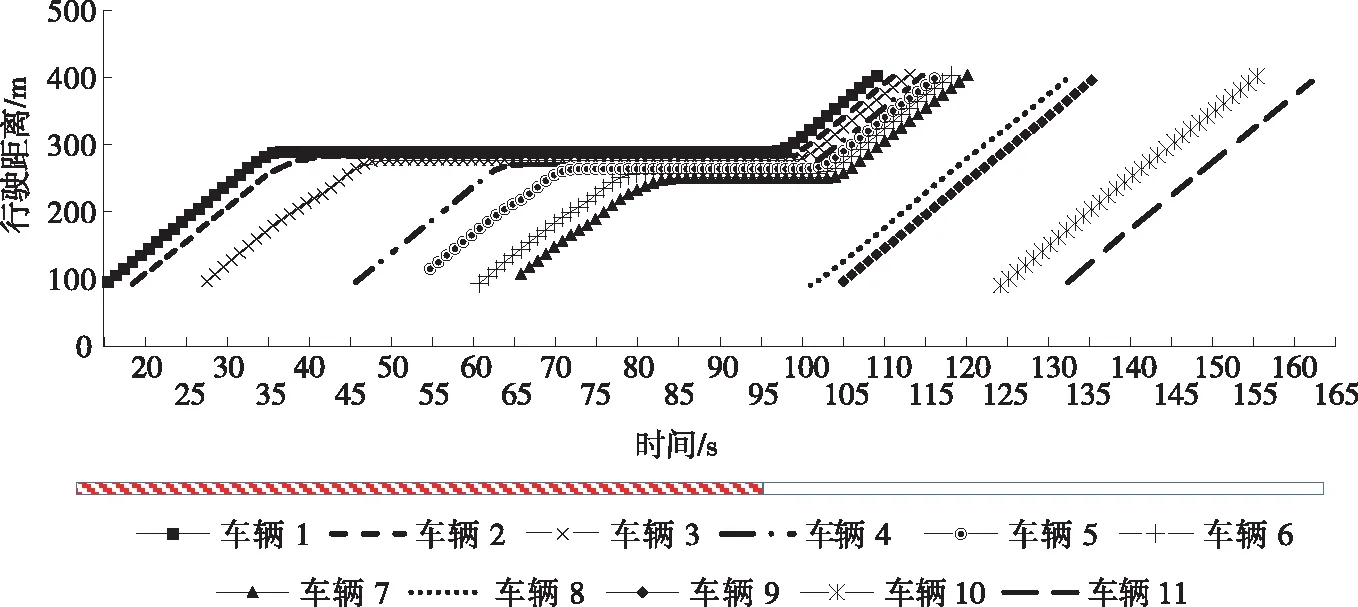
图1 车辆行驶时距图
根据*.fzp文件中的车辆实时运行信息,可计算出每辆车的瞬时比功率,再对照排放率表得到各车辆的各污染物瞬时排放率,从而得到每辆车的各污染物排放率变化曲线及排放量累计曲线(见图2、图3)。

图2 车队CO2排放率变化曲线
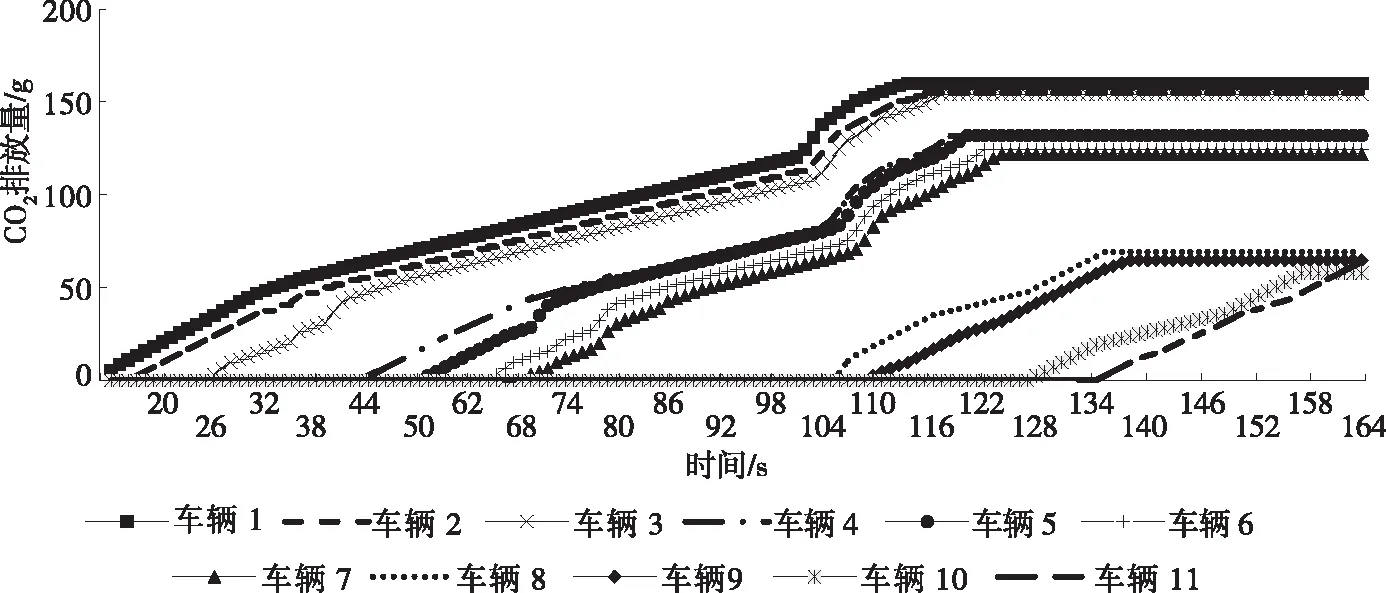
图3 车队CO2累计排放量变化曲线
由图1~3可知:车辆1、2、3在40~50 s时段开始减速;车辆4、5、6、7在65~85 s时段减速排队,在100 s绿灯启亮时,车队开始加速驶离交叉口;而车辆 8、 9、10、11不停车地通过信号交叉口。车辆运行工况在加减速及怠速状态时,其尾气排放将显著增加,车辆的尾气排放不但与其行驶速度有关,也与其延误时间、停车次数紧密相关。
3 信号交叉口机动车尾气排放量估算模型
实际应用中,如果逐个计算所有车辆在不同工况的尾气排放量,再求和得到整个路网的机动车尾气排放总量,所需信息量与计算量将非常庞大。为方便对路网车辆尾气排放总量进行测算,在基于比功率排放模型的基础上,研究适用于信号交叉口机动车尾气排放测算的方法,建立尾气排放量与延误时间、停车次数之间的关系模型。
3.1 尾气排放总量估算模型
为方便建立模型,假设:1) 所有车辆的排放率均如表1所示;2) 车辆在加速与减速时,采用同一等效加速度或等效减速度,且行驶速度相近;3) 因不完全停车工况难以量化,主要研究完全停车车辆在加减速工况的排放,不完全停车工况的排放归入匀速过程计算排放。
如式(2)所示,机动车尾气排放量可根据车辆在各比功率区间的工作时间乘以该区间的排放率来加和计算。根据车辆的行驶工况,可将车辆运行分为减速过程、怠速过程、加速过程和匀速过程,从而分不同过程计算车辆在信号交叉口的尾气排放总量E,即:
E=ED+ES+EA+EC
(3)
式中:ED、ES、EA、EC分别为车辆在减速、怠速、加速、匀速过程中的尾气排放总量(g)。
(1) 加减速过程。对于经历一次完全停车的车辆,每次停车所经历的比功率区间及其工作时间近似相同,所产生的尾气排放量也大致相同。因此,可假设一次完全加速过程的排放量eA1与一次完全减速过程的排放量eD1之和为可确定的常量。根据单个车辆在交叉口的总停车次数h,即可计算出单个车辆在交叉口的加速尾气排放量eA与减速尾气排放量eD之和:
eD+eA=h(eD1+eA1)
(4)
(2) 怠速过程。车辆运行在怠速状态时,其比功率为零,尾气排放率大小取表1中第3行数据。车辆的怠速工作时间取为其在交叉口排队等候的停车延误时间。
(3) 匀速过程。车辆匀速行驶时,根据行驶速度可确定比功率大小,得到对应比功率区间的尾气排放率。车辆的匀速时间tC等于匀速行驶距离除以行驶速度:
(5)
式中:l为行驶路段距离(m);lD1为一次完全减速过程的行驶距离(m);lA1为一次完全加速过程的行驶距离(m);v为匀速时的行驶速度(m/s)。
单个车辆的尾气排放总量e为:
e=eD+eS+eA+eC=h(eD1+eA1)+
(6)
式中:eS、eC分别为单个车辆在排队等待过程与匀速行驶过程中的尾气排放量(g);d为单个车辆的停车延误时间(s);RS为怠速工况下排放率(g/s);RC为匀速工况下排放率(g/s)。
若车流中包含N辆机动车,用D与H分别表示车流的总延误时间与总停车次数,则车流的尾气排放总量为:
E=H(eD1+eA1)+DRS+
(7)
式(7)表明车流的尾气排放总量和总停车次数与延误时间有关,停车次数越少,总排放量越少;延误时间越少,总排放量亦越少。
对于单个信号交叉口,其进口道平均延误时间d和平均停车次数h可通过韦伯斯特公式直接求出:
(8)
(9)

3.2 估算模型与原始模型计算比较
为研究估算模型的误差范围,分别使用原始模型[式(2)]、估算模型[式(6)、式(7)]对上一节中的仿真情景进行对比分析。
3.2.1 原始模型计算分析
根据VISSM输出的车辆实时运行信息计算每辆车的瞬时比功率,整理得到整个车队所有车辆的运行工况分布,结合表1计算整个车队的排放量,结果见表2。

表2 车队运行工况分布及排放量(原始模型)
3.2.2 估算模型计算分析
(1) 运行工况工作时间计算。使用估算模型计算尾气排放量时,需先获取车辆匀速行驶时间、怠速运行时间及停车次数。根据车辆运行过程的逐秒运行信息数据,获取表3所示各车辆在不同行驶过程的工作时间。

表3 车辆不同行驶过程的工作时间
(2) 排放因子标定。根据表1,可得到匀速与怠速工况下尾气排放率。由于车辆1~7均完成了一次完全停车,选取车辆1~7加减速排放量的平均值作为一次加减速过程排放量的排放因子。车辆1~7加减速排放量可根据车辆运行信息及图3所示排放量变化曲线求得,计算结果见表4。排放估算模型所需排放因子见表5。
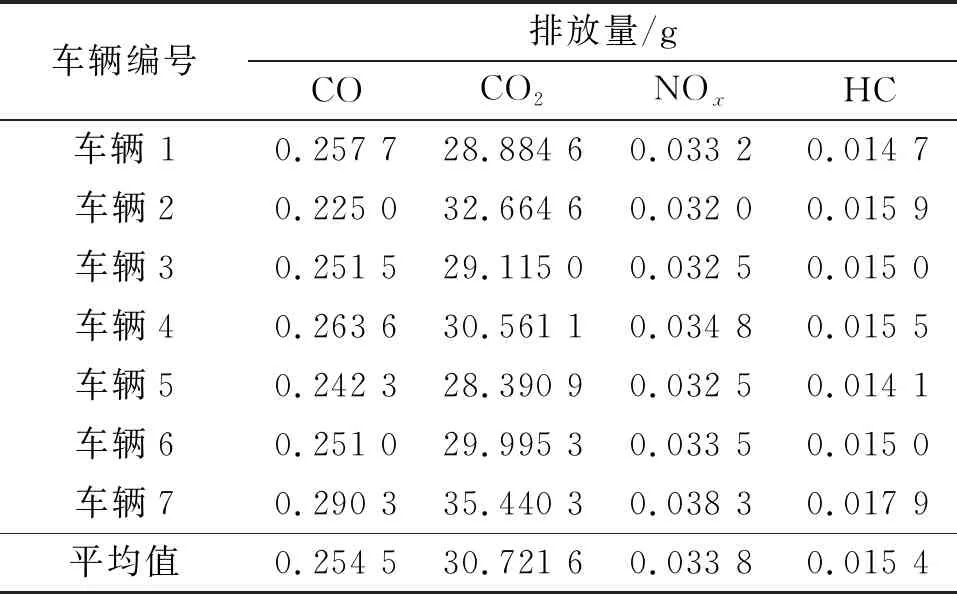
表4 车辆1~7加减速过程的排放量

表5 不同行驶工况的排放因子
(3) 排放量计算。根据各车辆不同行驶过程的工作时间及排放因子求出其排放量。以CO2为例,各车辆在不同行驶过程中的排放量见表6。

表6 车辆在各行驶过程中的CO2排放量 g
3.2.3 对比分析
在车辆平均行驶速度为10 m/s的情况下,对比使用估算模型与原始模型计算污染物排放的整体误差。如表7所示,估算模型与原始模型的计算结果非常接近,其误差不超过5%。
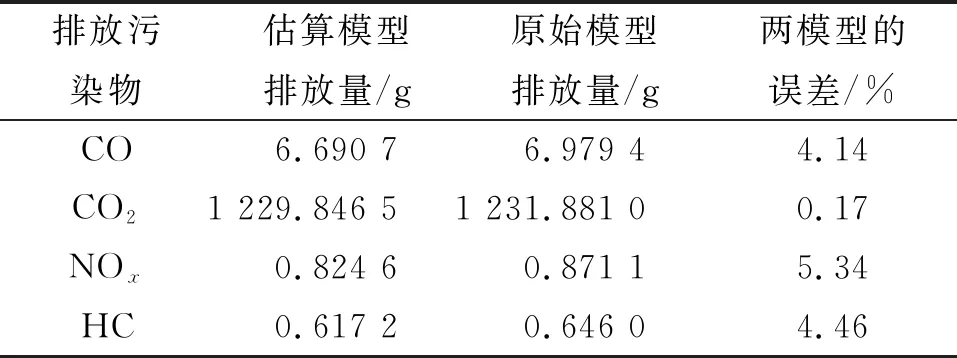
表7 各种污染物排放计算结果的整体误差
3.3 实际道路计算分析
通过车载诊断系统获取一辆小汽车1 d的行驶工况数据(实时行驶速度、加速度和经纬度等),研究估算模型的实用性及误差。
(1) 车辆属性及行驶信息。通过车载诊断系统获取车辆实时经纬度坐标信息和实时运行信息数据,其中与行驶相关的车辆基本属性和行驶信息见表8,其行驶轨迹见图4。
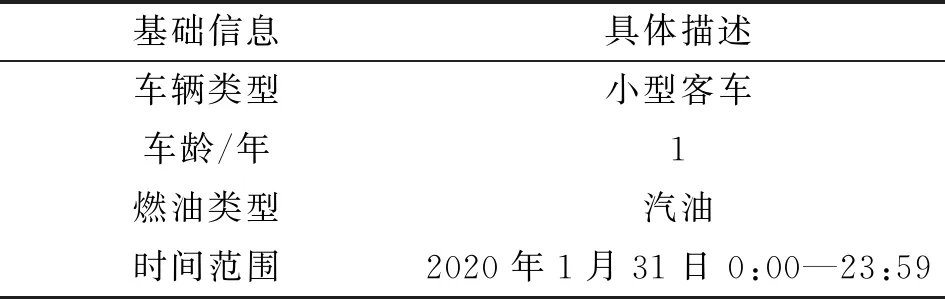
表8 车辆属性及行驶信息
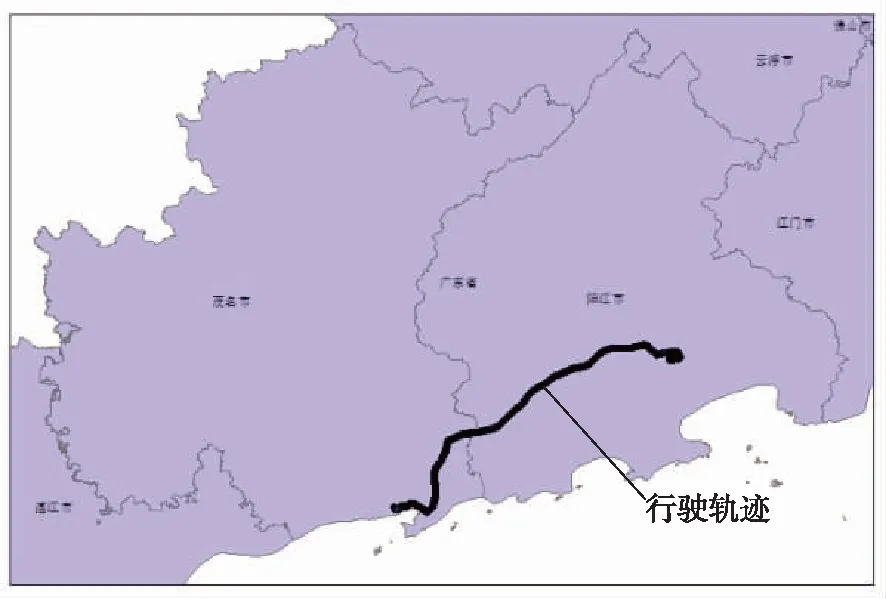
图4 车辆行驶轨迹示意图
(2) 车辆行驶特征分析。通过车载诊断系统下载车辆实时行驶信息数据(包含实时行驶速度、加速度、经纬度等),可获取车辆在不同行驶过程的运行时间和停车次数,计算车辆的瞬时比功率,结合表1,采用原始模型计算车辆的瞬时排放量。车辆相关行驶参数见表9,车速及CO2排放实时变化见图5、图6。其中车辆熄火后不能记录行驶信息,车辆运行时长不包括熄火休息和怠速过长而熄火的时间,停车怠速仅为制动状态下的怠速。由图5、图6可知:车辆匀速运行时长最大,匀速过程排放量也最大;怠速过程的停车时长越大,其排放量增大;加减速过程的运行时长占比虽小,但停车加减速次数越多,其排放量越大。实际行驶车辆的排放数据再次证明车辆处于加减速状态下尾气排放将显著增加,尾气排放与车辆停车次数、延误时间紧密相关。

表9 车辆行驶特征

图5 车速变化曲线

图6 车辆CO2排放变化曲线
(3) 排放因子标定。根据车辆实时行驶参数,获取车辆匀速过程的平均速度为68.67 km/h,加减速过程的平均加速度为0.54 m/s2、平均减速度为-0.56 m/s2。以平均速度及加减速度模拟车辆加减速过程,得到估算模型在匀速、怠速、加减速工况下的排放因子(见表10)。
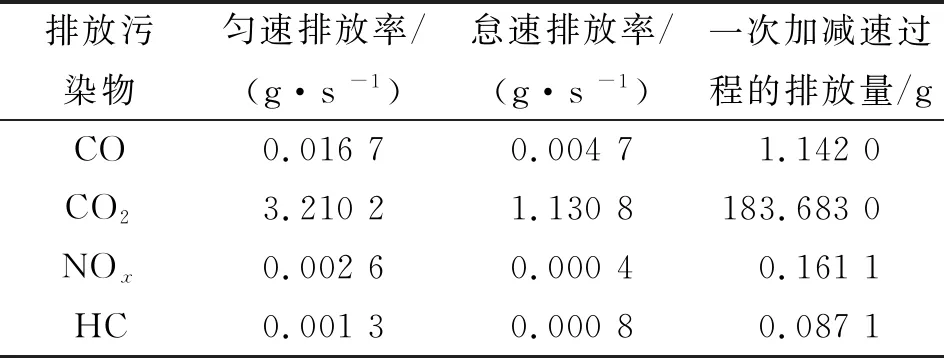
表10 示例车辆不同行驶工况的排放因子
(4) 排放计算对比。根据车辆实时行驶信息(实时行驶速度、加速度)计算车辆的瞬时比功率,结合表1,采用原始模型计算车辆的排放量。根据表9所示不同行驶过程的运行时间和停车次数及表10中排放因子,采用估算模型计算车辆在不同行驶过程的排放量。两模型计算得到各种污染物排放及其误差见表11,其计算结果非常接近,误差不超过8%,使用估算模型计算机动车尾气排放量可行。

表11 示例车辆污染物排放计算结果的整体误差
4 算例分析
以某十字交叉口为例,计算信号交叉口车辆的污染物排放,验证排放估算模型的有效性。
4.1 基础路况
该十字交叉口采用四相位信号控制,信号周期时长为100 s,车辆在路段上的平均行驶速度为10 m/s,平均减速度为-2.5 m/s2,平均加速度为1.5 m/s2,车道饱和流量为1 800 pcu/h。交叉口车道分布及信号配时方案见图7。
4.2 模型测算
先利用VISSIM仿真软件根据交通流量与配时方案建立十字交叉口仿真环境,采用VISSIM中的节点评价和*.Vehicle Record评价文件输出研究时段内交叉口各车道排队车辆的延误时间、停车次数及车辆瞬时运行信息等数据;然后根据表5中排放因子,按式(7)计算相应车道及整个交叉口的尾气排放量。以东进口各转向车流的CO、CO2排放为例,根据1 h交通仿真结果,利用估算模型计算其排放量,结果见表12。

(a) 车道及流量分布(单位:pcu/h) (b) 信号配时方案图7 交叉口车道分布及信号配时方案

表12 估算模型计算排放量
4.3 仿真验证
将VISSIM仿真软件与机动车排放软件MOVES相结合构建机动车尾气测算平台,测算每辆车及整个路网的尾气排放,验证估算模型的有效性。
使用MOVES 2014a软件的微观(Project)层面对该信号交叉口进行排放测算。先在MOVES软件中输入本地化信息(车型、车龄、燃油信息、气象参数等),然后根据VISSIM输出的车辆实时数据(逐秒车速、逐秒加速度、车道、车辆类型)计算车辆的比功率,分析车辆所处运行工况,得到交叉口各车道车辆在不同运行工况的分布时间,将其输入MOVES软件中,即可计算出相应的车辆排放总量。计算结果见表13。
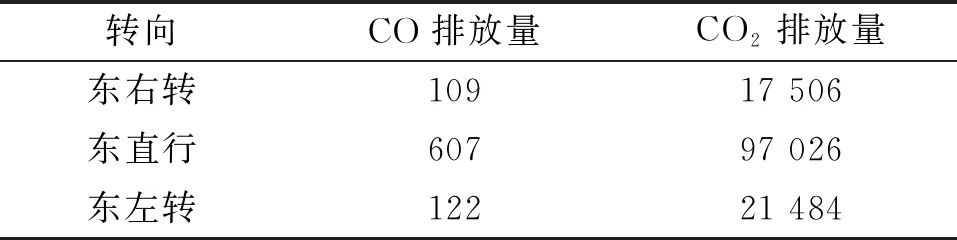
表13 VISSIM与MOVES统计得到的排放量 g
对比表12、表13,2种模型对CO与CO2排放量的估算结果均较接近,CO排放量的平均偏差为2%,CO2排放量的平均偏差为9%,误差处于可接受范围,估算模型有效、可行。造成估算误差的主要原因在于:1) 估算模型假设全部停车为完全停车,将不完全停车的情况归入匀速过程;而在仿真过程中,很多车辆会自动预先调节速度,车辆无需减速到零便可开始加速通过停车线。因此,使用估算模型得到的排放量略大于使用MOVES得到的排放量。2) 使用MOVES计算排放量时,排放率由所输入的运行工况、气候、车龄分布等数据综合决定,运行时排放率不断变化。
5 结语
通过分析车辆在减速、怠速、匀速和加速等工况下尾气排放特征,提出一种适用于信号交叉口的尾气排放估算方法,建立车流排放量与延误时间、停车次数之间的关系模型,由此将交叉口排放模型的主要自变量由速度、加速度转化为延误时间、停车次数,为面向低排放的交叉口信号优化方法研究提供新的思路。
在现代城市交通系统中,交通数据的来源、数量及种类繁多,各种路侧交通基础设施(如视频检测器、线圈检测器)、各种浮动车及移动终端(如出租车、公交车、专车)、各类交通数据服务平台(如滴滴出行、百度地图、高德地图)为实时获取与测算交叉口的延误时间、停车次数等交通运行指标提供了强大的技术支持。利用文中提出的汽车尾气排放总量估算模型可直接测算排放量,大大减少计算量。但如何根据实测数据对该模型的计算误差进行修正需进一步研究。
