自适应巡航目标跟踪不释放问题分析及策略优化
2022-08-09王孔龙冯程姜志豪郑丹陈音
王孔龙, 冯程, 姜志豪, 郑丹, 陈音
(北京市北汽股份有限公司 汽车研究院, 北京 101300)
汽车毫米波雷达在接收到ADC采样数据后,通过雷达信号处理,得到距离、速度和角度等原始点迹,对这些原始点迹数据使用目标跟踪算法进行处理,即可得到目标的估计位置和速度,形成目标的运动轨迹,自适应巡航系统根据该运动轨迹决策主车的下一步动作。由于现实道路上状况复杂多变,常规测试难以涵盖所有场景,要让智能驾驶的安全性适应于所有现实道路,需不断完善自适应巡航系统的硬件性能和软件算法。
在自适应巡航控制(ACC)对前方目标物的识别方面,文献[1]对如何选择安全合理的跟踪目标开展研究,针对城市拥堵工况,提出以系统整体架构为基础的分层式控制策略及基于道路传感数据的弯道限速模型,制定了两车运动状态线性相关的安全距离模型;文献[2]基于目标跟踪开展前方有效目标识别算法研究,通过多目标直道和多目标定曲率弯道2种工况下初步场地试验,探索自适应巡航控制系统对于前方有效目标的识别方法;文献[3]为提高自适应巡航系统对目标数据识别的连续性和稳定性,根据目标识别和目标跟踪的不同特点,在对毫米波雷达信号初步滤波的基础上,开发了具备目标识别、跟踪及功能切换的算法;文献[4]针对工程应用中汽车毫米波雷达的目标追踪问题,对雷达数据处理中的滑窗法、最近邻域法和最优匹配法进行了研究。这些研究对运动轨迹识别后如何反应才是合理的未作分析,且只是针对道路上常见场景,未涉及偶发的特殊场景。而如何在常见场景的基础上进一步涵盖特殊场景是智能驾驶安全的发展方向。该文针对某车自适应巡航系统对跟踪的前方目标物近距离快速切出后信号始终不释放的异常反应进行分析,优化自适应巡航系统的识别算法逻辑。
1 问题描述
某车开启自适应巡航系统在路口跟随前方车辆转弯,前车车身转过一定角度后保持静止,待对向直行车辆通过后加速拐弯离开,此时该车的自适应巡航系统仍认为前车在前方静止,始终保持静止跟随状态,导致交通堵塞。驾驶员只得退出自适应巡航系统,主动接管车辆,进而对自适应巡航系统的目标物识别可靠性产生担忧。
经反复测试,该车跟随前车跟停,前车车身转过一定角度后,该车只能看到前车的半个车尾,即只能看到一侧的后尾灯,此时不论前车是左转弯还是右转弯,只要是快速驶离,都会有较大概率导致自适应巡航系统的前方目标跟踪不释放,即始终认为前方还有车辆,从而保持自车(进行自适应巡航系统测试分析的车辆,下同)静止。这类现象发生时,自适应巡航系统探测的前方目标物距离多在5 m以内。
该车自适应巡航系统硬件架构为一个前向毫米波雷达加一个前向摄像头,由前向毫米波雷达进行主要识别和分析,并将结果发给前向摄像头进行确认,两者均对目标确认后,才发出目标物消失请释放制动或前方目标物存在请保持制动的请求信号。
2 问题分析
为避免目标物信号干扰,降低对目标物识别的运算量,自适应巡航系统的控制算法针对前方横向移动的目标物会进行先行过滤,故当前方车辆斜向静止时,有一定概率不能被自适应巡航系统识别。这就意味着前方车辆的斜向放置存在一个临界角度能被自适应巡航系统识别为前方目标物并进行跟踪,如果在跟踪过程中前方车辆的斜向放置角度越过临界角度,自适应巡航系统将认为前方没有目标物,进而按照驾驶员设定的速度控制车辆前行。此时前方目标物如果仍然在原地静止,而自适应巡航系统自行退出,则存在碰撞风险。
前方目标物探测信号发生跳变的现象有很多,如前方目标物切出当前车道、前方目标物快速转弯驶离、前方目标物由纵向行驶快速变为横向行驶且离开当前车道等。对于这些场景,都需要自适应巡航系统能及时作出正确的反应。
若前方车辆加速驶离后,自适应巡航系统仍然默认前方车辆还在前方,从而继续保持等待状态,此时车辆上相关网络信号见图1。自适应巡航系统一直在不同状态之间切换,而前方目标物距离始终在4 m。期间,驾驶员主动踩油门使ACC进入驾驶员超控状态,自适应巡航系统进入巡航控制状态,驱动车辆前进,自适应巡航系统随即因为前方有静止目标车辆制动至静止状态,转而进入静止激活状态,随后进入静止等待状态,期间前方目标物始终未丢失,前方目标物探测信号也始终处于检测到目标状态。但实际上前方车辆已驶离,自适应巡航系统这样的反应违背设计初衷,会导致追尾的潜在风险。
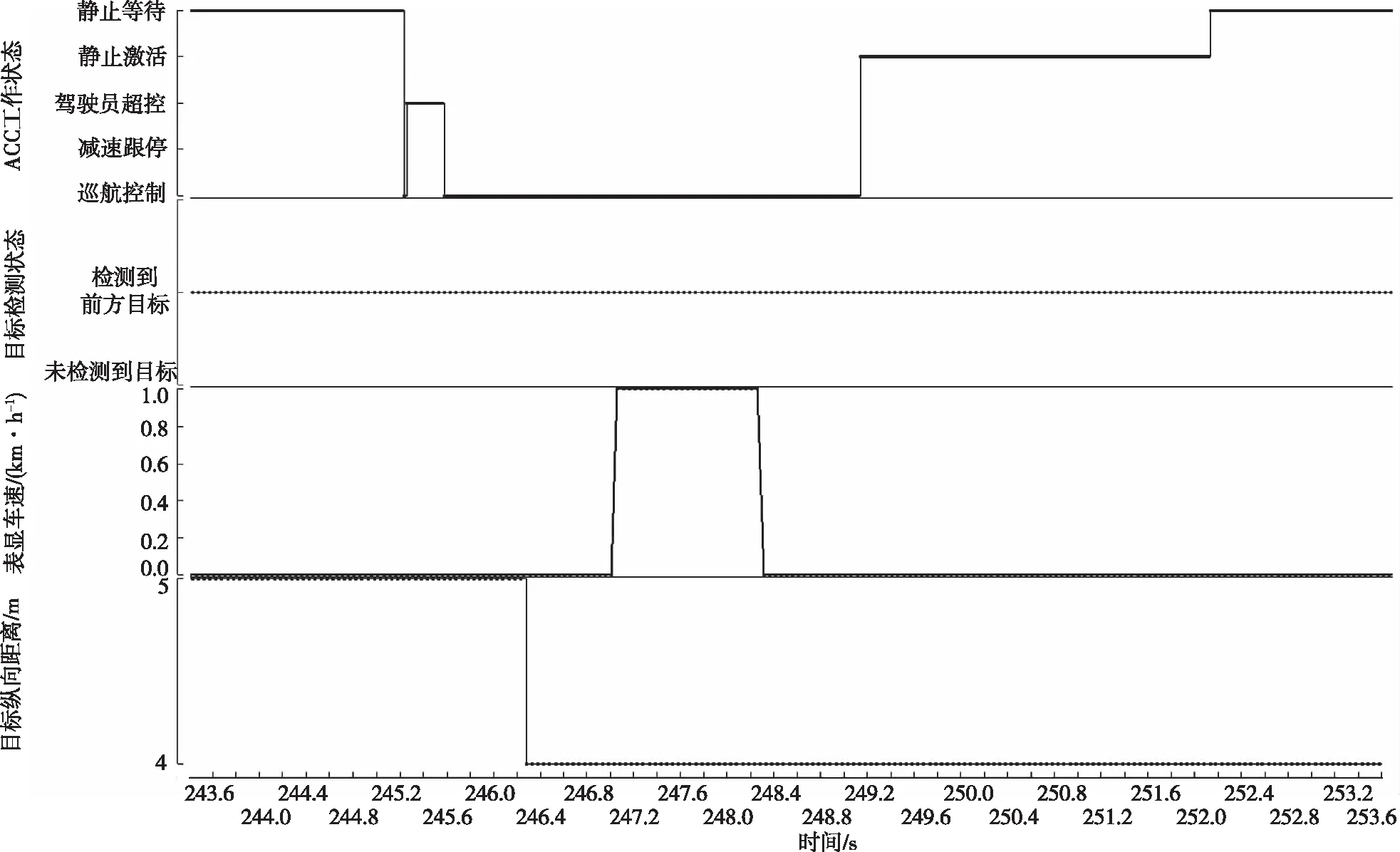
图1 某车自适应巡航系统在前方目标物拐弯驶离后仍处于等待状态时的网络信号
3 改进与验证
自适应巡航系统的设计初衷是在尽可能保证安全的情况下,极大释放驾驶员,提升用户驾驶体验。为保障车辆与驾驶安全,在自适应巡航系统的识别算法中增强目标检测与目标速度判断,并加入轨迹预测策略以提升目标检测的鲁棒性,同时优化雷达目标识别的确认逻辑。其识别策略优化见图2。

图2 跟踪目标丢失问题的识别策略及优化
当前方目标物在距离5 m内突然丢失时,系统会根据目标车辆的行驶轨迹预测是否是正常切出本车道的状态。如果是,则释放前方目标物信号,请求车辆继续行驶;如果前方车辆是处于直行状态而突然消失,则紧急退出自适应巡航系统,将车辆控制权交由驾驶员。
加入轨迹预测策略,优化雷达目标识别的确认逻辑后,经多次测试,自适应巡航系统在遇到前方目标物近距离拐弯快速驶离时均能及时释放前方目标物,保持自适应巡航系统无前方目标物的工作逻辑,继续正常行驶。测得的相关网络信号见图3。
从图3可看出:自适应巡航系统控制车辆逐步跟近前方目标,距离3 m时,前方车辆拐弯加速驶离,检测状态由检测到前方目标变为未检测到目标,突然探测不到前方目标,此时ACC状态从巡航控制模式短暂切换到静止激活状态,随即又进入巡航控制模式继续正常行驶,车速也由静止逐步升高,自适应巡航系统控制车辆稳步提速。可见,自适应巡航系统反应正常,优化策略有效。

图3 优化后自适应巡航系统遇到前方车辆拐弯驶离后的网络信号
4 结语
受限于当前传感器的性能,前方目标物的识别对于自适应巡航系统是一大挑战,不仅要求硬件不断优化识别能力,还要求从识别算法上优化逻辑,加入前方目标物轨迹预测等策略来弥补硬件的性能盲区。总体来说,自适应巡航系统工作时的安全主体是驾驶员,在自适应巡航系统无法作出正确判断时,降低车速并保持正常路线继续行驶,将可能带来的误判后碰撞风险交由驾驶员执行,保持道路通畅的同时避免对道路上其他交通参与者带来额外风险。
