基于ARM技术的DS6系列驱动单元盒测试工装的设计
2015-06-25高峰,冯明
高 峰,冯 明
(沈阳铁路信号有限责任公司,辽宁沈阳110025)
1 引言
随着我国铁路建设的快速发展,为了保证列车行车安全,铁路电务系统对信号设备的需求和依赖程度日渐增多,与此同时对信号设备的质量、和可靠性、稳定性的要求也日益严苛。因此保证产品质量,实现产品“零缺陷”是企业发展的重中之重。
DS6系列动态驱动单元盒由两种产品组成,分别为DS6-DTH2型动态驱动单元盒和DS6-DTH2-TW型驼峰动态驱动单元盒,两种动态驱动单元盒工作机制相同,只在控制信号输入和公共信号的端子定义上不同。两种动态驱动单元盒分别适用于DS6-11型联锁系统和TW2型驼峰控制系统接口设备,负责接收控制系统动态驱动信息,驱动JPXC-1000型偏极继电器,控制相关设备动作(道岔、转辙机等),每台驱动单元盒可完成4组偏极继电器的控制工作。为了保证动态驱动单元盒的可靠输出和产品质量,使产品在出厂前能够顺利完成相应功能的电气性能测试,因此开发设计了基于ARM技术的DS6系列动态驱动单元盒测试工装,并完成了下位机软件和上位机软件的开发调试工作。
该套测试工装通过上位机读取产品条码,选择被测试产品类型,ARM芯片接收上位机的控制命令后,通过控制机制的选择,切换单元盒控制信号输入和公共信号端的选择,使一套工装可以满足两种产品的测试需求。
2 系统硬件设计
2.1 测试电路原理

图1 测试电路工作原理图
以DS6-DTH2-TW型驼峰动态驱动单元盒的硬件测试电路为例进行介绍,测试电路原理如图1所示。该电路主要由信号发生器、偏极1000继电器、驱动单元盒、数字秒表、A/B倒机电源及A/B机024V公共信号端等组成。驱动单元盒可接收8路控制输入信号(A组4路、B组4路),输出4组驱动信号,可控制4台偏极1000继电器动作。驱动单元盒的工作指标主要表现在驱动单元盒的驱动下偏极1000继电器的缓吸缓放时间的长短及驱动单元盒输出电压峰值的大小上,驱动单元盒的工作指标如表1所示。

表1 驼峰单元盒主要技术指标
2.2 测试工装硬件组成
按照测试电路工作原理,以ARM芯片为核心设计了驱动单元盒测试工装,该设备由电源输入及电压转换电路、控制信号输出电路、驱动输出电路、ARM控制执行电路及ARM外围电路和上位机通信电路等组成。设计需要解决两类单元盒测试信号切换、A/B 路工作电源切换、测试工装下位机与上位机通信、控制信号驱动、采集等问题。测试工装硬件工作原理框图如图2所示。
(1)电源输入及电压转换电路。该模块主要用于为整个测试工装提供电源支持,电路设计时增加了测试柱,便于工作电压的测量及调整,其工作原理如图3所示。

图2 驱动单元盒测试工装工作原理框图

图3 工装电源输入及电压转换原理
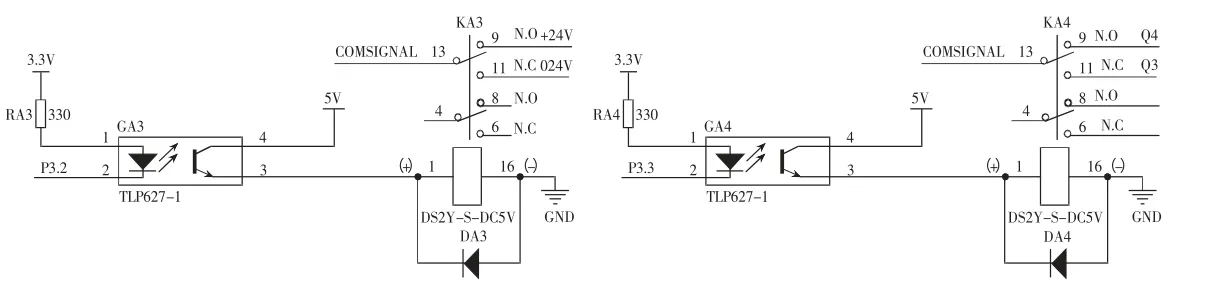
图4 控制信号公共端切换电路

图5 驱动电源盒A/B 路工作电源切换电路

图6 ARM芯片外围电路
(2)控制信号公共端切换电路。该模块用于完成两类动态驱动单元盒公共信号的选择切换,ARM通过控制TLP627光耦的导通,来驱动DS2YS-DC5V继电器动作,完成对两类驱动单元盒公共信号选择,其工作原理如4所示。
(3)驱动电源盒A/B 路工作电源切换电路。该模块主要完成驱动单元盒A/B 路工作电源切换功能,用于检测驱动单元盒在联锁或驼峰系统的A/B机倒机时,能否完成A/B控制信号的输出,驱动偏极继电器。
(4)ARM外围电路。外围电路主要由电源输入端、232通信接口、看门狗复位信号等组成,其工作原理如图6所示。

图7 主函数流程图
3 软件设计
3.1 ARM程序设计
驼峰驱动单元盒测试工装下位机程序完成的主要功能为:测量上位机指定通道的缓吸时间、缓放时间、输出电压参数,并将测量结果发送给上位机。
主函数流程如图7所示,程序在初始化和与上位机通信之后,进入中断模式,在串口中断响应函数中,对接收到的上位机命令信息进行判断识别,根据识别的结果来执行相应的程序,执行完函数之后重新进入中断模式,等待上位机的下一次命令信息。
下位机软件主要子函数的功能介绍如下。
(1)串口功能(中断)。LPC2214提供了2个uart串口,本程序仅用uart0,中断为串口接收中断。串口uart0主要实现的功能为接收上位机发送的信息,并且依据已经定义好的通信协议进行判断。如判定结果为真,向上位机发送正确标志并跳转至相应的执行函数,如判定结果为假,则向上位机发送错误标志而并不执行任何操作。
(2)通信函数在初始化函数之后,执行通信函数。通信函数的功能为:依据既定通信协议,与上位机按既定顺序收发数据,由于通信函数收发的数据具有先后顺序,所以用查询方式来应用串口。除通信函数外,串口一律采用中断方式。
(3)两类单元盒测试切换函数。由于两类单元盒在动态脉冲信号公共端、输出端口管脚等有一些不同,所以在测试之前,需要上位机指定板卡的类型。程序流程图如图8所示。

图8 单元盒切换函数流程图
(4)电压、缓吸时间测试函数。电压、缓吸时间测试函数是本程序的核心,本函数根据上位机发送的通道信息(A1-A4、B1-B4)来执行相应的通道测试函数,执行程序流程图如图9所示。

图9 电压、缓吸时间测试函数流程图
3.2 上位机程序设计
上位机软件在设计上使用VB语言进行编程和建立函数调用关系,软件在设计中解决了VB程序与下位机的CAN通信和excel表格的数据交互问题。软件向用户提供扫描枪扫描产品条形码编号的功能、根据产品编号自动生成测试流程、用户可以点击测试界面上测试流程中的测试项来完成测试项的测试、根据测试结果自动生成电子报表,保存测试记录,并对测试记录的版本进行控制。软件设计流程如图10所示,测试界面如图11所示。

图10 上位机软件设计流程图

图11 上位机软件测试界面
4 结论
实际应用证明,驱动单元盒测试工装的测量结果与人工搭建的测试电路的测量结果最大偏差仅为2%,完全能满足测试的精度要求,且该工装有效地管理了电路板的测试流程及测试方法,提高了测试效率,自动生成的电子测试记录表,避免了人工填写的错误和纸张对电路板的静电影响,对提高产品的质量具有重要意义。DS6系列驱动单元盒测试工装的使用,提高了所交付产品的质量,同时能够缩短所交付产品的供货周期,作为有形的产品带来了无形的经济效益。
[1]刘栋梁.便携式数据采集与处理系统的实现[J].计算机测量与控制,2002,10(2):127-129.
[2]季 栗,林俊超,宋 飞.ARM嵌入式应用系统开发典型实例[M].北京:中国电力出版社,2005.
[3]Andrew N.Sloss.ARM嵌入式系统开发:软件设计与优化[M].北京:北京航空航天大学出版社,2005.
[4]铁运[2008]142号,铁路信号维护规则技术标准I[S].北京:中国铁道出版社,2008.
[5]TB/T 3027-2002.计算机联锁系统技术条件[S].2002.
[6]ARM Limited.ARM7 TDMI Technical Reference Menual.ARM DDI 0210A.2001.
