外场条件下战车捷联惯导系统原位快速多位置标定技术
2014-07-02黄湘远汤霞清高军强
黄湘远,汤霞清,武 萌,高军强
(装甲兵工程学院控制工程系,北京 100072)
外场条件下战车捷联惯导系统原位快速多位置标定技术
黄湘远,汤霞清,武 萌,高军强
(装甲兵工程学院控制工程系,北京 100072)
为了降低捷联惯导系统标定成本和复杂度,提高系统导航精度,针对战车火炮捷联惯导系统的安装特点,提出了一种外场条件下捷联惯导系统的原位快速自标定技术。分析了系统的可观测性,推导了常规多位置标定方案;将等效陀螺信息引入到单一位置初始对准过程中,加快了对准速度和相关状态的估计速度;设计了一种针对战车特色的多位置快速标定方案,并进行了试验仿真。结果表明,该方法能够有效完成系统标定,精度高,速度快,同时条件要求简单,可操作性强,便于实际应用,具有重要的工程应用价值。
外场条件;原位多位置标定;捷联惯导;等效陀螺
信息化战争中,战斗单体的惯性导航功能作为构建作战网络的底层支撑功能,已成为新型战车战技指标的基本内容。当前,国外大量和国内部分新型战车安装了惯导系统。惯导装置在安装之前都经过了精密标定和误差补偿,装备初期使用精度能够得到保证,随着惯导系统误差参数的改变,长时间后导航精度不可避免地逐步降低。为此,需要定期将惯导装置从车上拆卸下来,通过高精度测试设备对其进行重新标定,这样导致设备维修周期较长,成本较高,同时也导致装备的完好率较低,影响部队的战斗力。因此,有必要研究外场条件下(无高精度测试设备)的惯导系统原位(不拆卸惯导系统)自标定技术。
外场标定条件下,没有高精度转台等可提供精确姿态的辅助装备,只能依靠速度、位置信息来间接标定,受系统可观测度的限制,单一位置无法完成系统标定,必须引进多位置才能完成[1-2]。文献[3]利用粗对准结果替代精确姿态值和利用ESO、TD提取速度误差的微分信息和二阶微分等手段实现该方案。该方法实验条件要求比较简单,算法复杂度较低,其缺点是:
1)ESO、TD的提取结果依赖于参数设置,参数设置是个比较复杂的问题,难以保证参数的适用性。
2)利用粗对准结果来代替载体的实际姿态,受粗对准精度的限制,难以达到很高的标定精度。
实际上,快速标定的关键是快速有效地估出εN和ΔU,常规方法一般将其扩展成系统状态,使用卡尔曼滤波来估计。其主要有两个缺点,一是估计精度严重依赖于系统误差的先验统计知识;二是εN的估计速度较慢,影响标定速度。为此,引入自适应卡尔曼滤波,能够较大程度地降低系统对误差参数的依赖[4]。同时,可将等效陀螺引入到初始对准中[5-7],快速完成对准并估出εN和εU,继而使用精对准结果代替载体的实际姿态,并将εN和εU引入到标定过程中,同时提高标定速度和精度。
笔者针对战车火炮光纤陀螺捷联惯导装置的特色安装方式,设计了外场条件下惯导装置的原位快速自标定方案,并进行了试验仿真。仿真表明,该方案条件要求简单,可操作性强,标定精度高,速度快,便于实际应用,具有重要的工程应用价值。
1 外场条件下多位置标定原理分析
外场标定依靠速度、位置信息来间接对系统进行标定,标定结果的好坏严重依赖于标定系统的可观测性,因此有必要分析系统的可观测性[8-9]。
在实验室中,整个标定过程主要标定陀螺和加表的零偏、标定系数、安装误差等参数[10],考虑到外场条件的限制,可降低系统的标定要求,只标定陀螺和加表的零偏及加表的标定系数。
1.1 单一位置下的可观测性分析
记n系为东北天(O-ENU)导航坐标系,b系为右前上(O-xyz)载体坐标系,Δb、εb为载体坐标系中加表和陀螺的总测量误差,Δi、δKai、εi(i=x, y,z)分别为加表零偏、标定系数误差和陀螺零漂,ai为载体系中各轴的真实加速度。θ、γ、ψ为载体俯仰、横滚和方位角,φ=(φE,φN,φU)T为姿态误差,δv=(δvE,δvN,δvU)T为速度误差,δP=(δλ,δφ,δh)T为位置误差。其中,φE、φN和φU为东向、北向和方位失准角,δvE、δvN和δvU为东向、北向和天向速度误差,δλ、δφ和δh为经度、纬度和高度误差。
设状态变量为

以δv和δP为观测量,则任一静态位置下,除观测量外,还有如下几个可观测组合状态
其中:ΩN=ωiecosλ;ΩU=ωiesinλ;

从t3可以看出,等效天向加表误差ΔU完全能观。考虑到当前惯导系统惯性器件的实际情况,一般有o(‖φEΩU‖)≤o(‖εN‖)和o(‖φEΩN‖)≤o(‖εU‖),根据t4和t6,可以认为等效北向陀螺εN和等效天向陀螺εU近似可观。不过,状态可观并不代表系统状态能够在短时间内估出,其估计速度还与状态可观测度相关。由于εU可观测度低,一般认为静基座下其不可观。
1.2 多位置标定方案
多位置标定的思想是:当拥有足够多的观测值序列{ΔU(i)和{εN(i)时,利用最小二乘法估出Δi、δKai和εi(i=x,y,z)[1]。记则

其中:


cij(k)表示k位置转移矩阵的(i,j)元素,其中由(θ,γ,ψ)唯一决定。式(2)有解的必要条件就是M和N满秩。文献[1]指出,当和分别至少存在三个不同的值且k≥6时,式(2)有解,上述9个参数就能够有效标定。由于标定过程中需要用到,而外场条件下真实值无法得到,可以用粗对准结果来近似代替[1-3]。
2 引入等效陀螺信息的快速标定方案
快速标定的基本步骤是短时间内快速有效地估出εN和ΔN。当以δv和δP作为观测量时,不论是初始对准还是组合导航,其方位失准角φU、等效北向陀螺εN和等效天向陀螺εU估计速度都较慢,这是因为外观测量仅使用了加速度计的量测信息,对陀螺信息利用得不够。为此,可将等效陀螺误差、速度误差作为初始对准系统的观测量,加快相关量的估计速度[5-7]。笔者发现该方法不仅使等效北向陀螺εN的估计速度加快,等效天向陀螺εU的估计速度也大大加快,即同等条件下同一位置获得了更多的可观测信息,有利于提高多位置标定的精度。
2.1 等效陀螺误差
捷联惯导系统中,导航平台坐标系n由当前真实地理位置给出,是个理想坐标系,实际上无法得到;计算平台坐标系p为导航过程中的实际使用的坐标系,依据惯性传感器敏感的惯性信息和初始时刻的地理位置信息迭代更新,p系是n系的近似估计。理想情况下,两个坐标系是重合的,实际过程中,由于各种误差的存在,使得两者之间存在失准角φ=(φE,φN,φU)T。
静基座下,惯导系统敏感到角运动信息为地球自转角速度ωie,在导航坐标系n、计算坐标系p、载体坐标系b的投影为、和,陀螺量测值为=+Δωb。定义状态误差:δω=-,则有:

其中,δω = (δωE,δωN,δωU)T= (0,ΩN,ΩU)T,Δωb=ωb+o(δω),则
2.2 系统可观测性分析
为了降低系统复杂度,静基座初始对准一般忽略位置误差δP,此时系统状态为

常规初始对准以δv作为观测量,这里将δv和δω作为观测量,加大对陀螺信息的利用率,形成新的初始对准系统。
当姿态误差角φ为小角度时,快速对准系统近似为线性定常系统,其可观测性分析较为简单。设系统可观测性矩阵为Q,有rankQ=9,即系统状态量中只有9个为可观测量,另外3个为不可观测量,这和常规对准方法结果一样,说明引入等效陀螺误差信息并不能带来更多的可观测状态。
状态变量的可观测度的大小影响卡尔曼滤波状态估计精度,有必要对其进行分析。使用奇异值分解方法来计算状态的可观测度,将Q进行奇异值分解Q=U∑VT,有:

相对常规方法而言,εU的可观测度由0.000 5提高到0.9,可观测性显著提高,由近似不可观变成可观。系统的3个不可观测状态为ΔE、ΔN和εE。
令系统观测量Z=(z1,z2,z3,z4,z5)T,有:

则失准角φ和等效陀螺εN,εU的最优估计,为

可以发现,各估计量都是观测信息本身及其一阶微分的线性组合,利用自适应卡尔曼滤波可以快速有效的估出相关状态。
2.3 一种新的标定方案
1.2节提到的多位置标定方案是在每个位置上利用ESO或TD提取εN(i)和ΔU(i)信息,然后针对多个位置的观测序列{ΔU(i)和{εN(i)使用最小二乘法来完成惯导自标定。而静基座下基于等效陀螺信息的快速对准方法中,不仅能够短时间里得到εN(i)和ΔU(i),还能够有效估计出εU(i)。这样,在多个位置下,得到了更多的观测信息序列{εU(i),将其引入到陀螺标定过程中,形成新的自标定方案。该方案具体如下:

cij(k)表示k位置转移矩阵的(i,j)元素。由于该方案相对原方案具有更多的观测值,利用最小二乘法的陀螺漂移估计值相对原方案具有更高的精度。同时,由于系统在任意位置上均完成了精对准,从而可用精对准结果来取代原方案中粗对准结果,进一步提高标定精度。
3 试验仿真与验证
3.1 试验可行性探讨
当前,战车捷联惯导装置常安装在车体底部,惯导Oxy平面与车体底部平面平行,惯导y轴指向车体前向,z轴垂直向上,x轴与y轴、z轴形成右手坐标系,其主要目的是完成战车导航以及姿态测量。
战车捷联惯导装置原位标定过程要求外界提供惯导多个位置(至少6个位置,横滚角和俯仰角分别不少于3个不同值),不同横滚角(俯仰角)之间的角度差足够大(一般10°以上)。这就要求战车至少停放在6个不同姿态的位置上,并且要求能够提供10°以上的侧倾角,一般情况下很难达到条件,也比较危险。
由于战车火炮捷联惯导安装在坦克火炮摇架上,惯导y轴平行于火炮身管,指向前方,x轴平行于炮管耳轴,指向右方,z轴指向上方,与x、y轴构成右手坐标系。此时,惯导的主要目的是完成火炮姿态测量以及战车导航定位。
在车辆静止情况下,可以通过转动炮塔、摇动炮管来改变惯导的姿态。如果将车辆停在水平面或近似水平面上的话,转动炮塔、摇动炮管只能改变惯导的俯仰角和方位角,不能或者很小改变横滚角,此时难以满足多位置标定的条件。不过设想将战车停靠在坡度较大的斜坡上,旋转炮塔、摇动炮管就能将斜坡坡度耦合到惯导的横滚角上去,此时可以获得多个不同的横滚角,从而满足多位置标定的条件。
3.2 多位置编排
设惯导姿态为(θ,γ,ψ),θ、γ和ψ分别表示俯仰、横滚和方位角。不妨假设初始时刻,车辆停靠在坡度23°的正北方向的斜坡上,火炮身管与车体前向平行,炮管位于炮塔平面上,此时惯导姿态和车体姿态一致,为(23°,0°,0°),然后将炮管打到最大仰角(不要求精确值),不妨设为55°,则此时惯导姿态为(78°,0°,0°)。然后将炮塔分别逆时针、顺时针旋转较大角度(不要求精确值,但要求不小于60°),不妨设为90°、-90°,在各个位置分别将炮管调平和打到最大仰角,得到惯导的6个位置。经过推算,可得到惯导如下6个不同姿态。为了描述方便,不妨将所有角度均取整数,得到多位置编排如表1所示。

表1 多位置编排方案
上述描述中“正北方向”、“23°”等均不需要精确值,只是为了描述和仿真简便而进行的假设,实际过程中斜坡方向可以为任意方向、各个角度只需要一个大致值即可。
3.3 计算机仿真
仿真中取:陀螺常值漂移0.02(°)/h,随机漂移0.02(°)/h,加表常值零偏0.1mg,随机零偏0.1 mg,标度因数误差5×10-5。
仿真过程中,粗对准持续5s,精对准120s,使用快速对准方法完成初始对准并对相关状态进行估计。其中,位置1时,εN和εU的估计曲线如图1所示。
从图1可以看出,在较短时间内,εN和εU就能够收敛到参考值附近,表明该方法能够快速有效地估计出εN和εU,两者的估计精度和速度相当。
依据表1所设定的多位置编排方案,首先分别在每一位置分别完成快速初始对准,并获得{ΔU(i)、{εN(i)和{εU(i),然后进行多位置标定,具体结果如表2~表4所示。

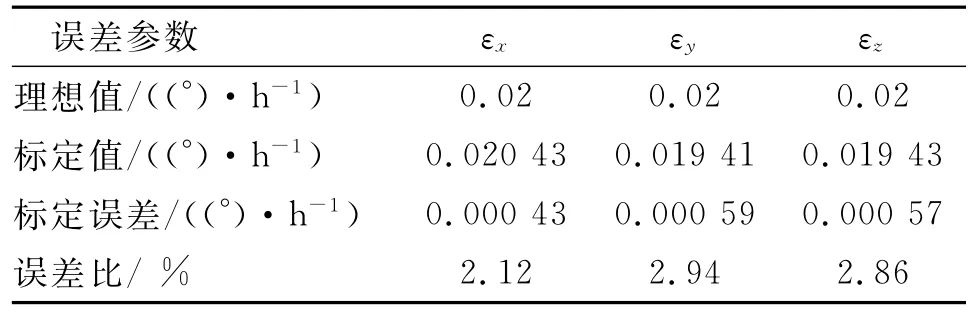
表2 陀螺零偏的标定结果

表3 加表零偏的标定结果
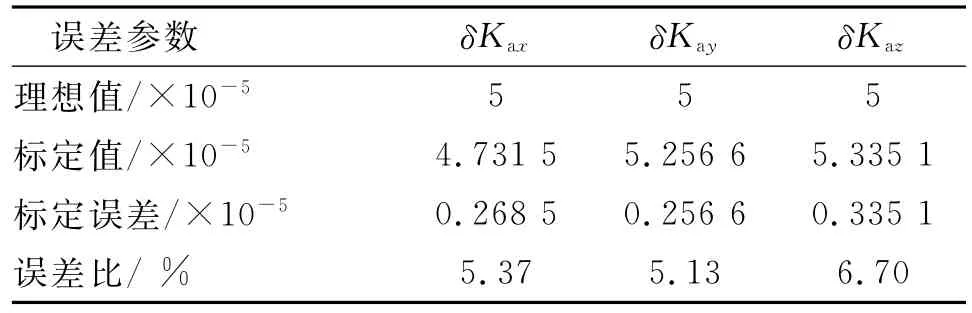
表4 加表标定系数误差的标定结果
从表中可以看出,各个误差参数的标定精度都较高,能够满足标定要求。具体来讲,陀螺的标定误差控制在2%以内,而加表的标定误差相对差一点,约为5%左右,这是因为在标定陀螺的过程中,用到了εN和εU两个估计量,而标定加速度计只用到ΔU一个估计量。加表标定中,z轴加表零偏Δz和标定系数误差δKaz相对x、y轴来讲,误差较大,这主要与捷联惯导系统高度发散有关,实际上在车载导航过程中,一般来说都往往忽略高度通道,降低系统的维数,减小系统的计算量,或者用外观测量进行阻尼,减少系统误差。
4 结 论
笔者通过引入陀螺信息,加快初始对准速度,短时间内估出标定所必须的信息,为外场条件下原位快速多位置标定提供了可能。最后,针对战车火炮捷联惯导的安装特点,设计了一种多位置编排方案,快速有效地完成原位标定。该方法算法简单,可操作性强,便于实际应用,能够在提高车载光纤陀螺捷联惯导导航精度中发挥重要的应用作用,有助于提高坦克的战技指标。
(References)
[1]薛文超,牟玉涛,黄一,等.外场条件下激光捷联惯组多位置标定方法精度分析[J].中国惯性技术学报,2012,20(1):39-45.XUE Wen-chao,MU Yu-tao,HUANG Yi,et al.Precision analysis for laser SINS’s calibration in outer field[J].Journal of Chinese Inertial Technology,2012,20(1):39-45.(in Chinese)
[2]杨晓霞,黄一.利用ESO和TD进行的激光捷联惯组误差参数外场标定方法[J].中国惯性技术学报,2010,18(1):1-9.YANG Xiao-xia,HUANG Yi.Application of ESO and TD to outer field calibration of laser gyro SINS[J].Journal of Chinese Inertial Technology,2010,18(1):1-9.(in Chinese)
[3]杨晓霞,黄一.外场标定条件下捷联惯导系统误差状态可观测性分析[J].中国惯性技术学报,2008,16(6):657-664.YANG Xiao-xia,HUANG Yi.Observability analysis for error states of SINS under outer field conditions[J].Journal of Chinese Inertial Technology,2008,16(6):657-664.(in Chinese)
[4]苏宛新,黄春梅,刘培伟,等.自适应Kalman滤波在SINS初始对准中的应用[J].中国惯性技术学报,2010,18(1):44-47.SU Wan-xin,HUANG Chun-mei,LIU Pei-wei,et al.Application of adaptive Kalman filter technique in initial alignment of inertial navigation system[J].Journal of Chinese Inertial Technology,2010,18(1):44-47.(in Chinese)
[5]黄湘远,汤霞清,郭理彬.一种新的捷联惯导快速对准方法[J].弹箭与制导学报,2012,32(1):17-20.HUANG Xiang-yuan.TANG Xia-qing.GUO Li-bin.A new method for quick initial alignment of SINS[J].Journal of Projectiles,Rockets,Missiles and Guidance,2012,32(1):17-20.(in Chinese)
[6]熊剑,刘建业,赖际舟,等.一种陀螺量测信息辅助的快速初始对准方法[J].宇航学报,2009,30(4):1455 -1459.XIONG Jian,LIU Jian-ye,LAI Ji-zhou,et al.A fast initial alignment method assisted by the measurement information of gyro[J].Journal of Astronautic,2009,30(4):1455-1459.(in Chinese)
[7]高伟熙,缪玲娟,倪茂林.一种引入陀螺角速度信息的快速对准方法[J].宇航学报,2010,31(6):1596-1601.GAO Wei-xi,MIAO Ling-juan,NI Mao-lin.A fast initial alignment method with gyro angular rate information[J].Journal of Astronautic,2010,31(6):1596-1601.(in Chinese)
[8]Yonggang Tang,Yuanxin Wu,Meiping Wu,et al.INS/GPS integration:global observability analysis[J].IEEE Trans.on Vehicular Technology,2009,58(3):1129-1142.
[9]Stancic R,Graovac S.The integration of strap-down INS and GPS based on adaptive error damping[J].Robotics and Autonomous Systems,2010,(58):1117-1129.
[10]Han K,Chang-Ky Sung,Yu M.Improved calibration method for SDINS considering body-frame drift[J].International Journal of Control,Automation,and Systems,2011,9(3):497-505.
In-situ Rapid Multi-position Calibration Technology of Combat Vehicle SINS Under Outfield Conditions
HUANG Xiang-yuan,TANG Xia-qing,WU Meng,GAO Jun-qiang
(Department of Control Engineering,Armored Force Engineering Academy,Beijing 100072,China)
For the sake of reducing calibration cost and complexity of combat vehicle SINS as well as improving the accuracy of SINS,aimed at the installation features of combat vehicle gun SINS,a kind of novel in-situ rapid multi-position calibration technology was proposed.The observability of the system was analyzed and the conventional multi-position calibration scheme was derived.The equivalent gyro information was introduced in the process of single position initial alignment,this accelerated alignment speed and evaluation speed of relative states.The new rapid calibration method directed at the combat vehicle characteristics was designed and experimental simulation was carried out.The results showed that the new method can rapidly and effectively accomplish the system calibration with high accuracy.Meanwhile the condition requirements of this method are very simple,its operability is better and it has the convenient practical application,and thus the method has the important engineering application value.
outfield conditions;in-situ multi-position calibration;SINS;equivalent gyro
U666.1
A
1673-6524(2014)01-0065-06
2013-06-18;
2013-10-26
黄湘远(1988-),男,博士研究生,主要从事惯性导航技术研究。E-mail:huangxiangyuan.623@163.com
