基于渔业养殖的清道夫型仿生机械鱼设计
2024-05-07贺双旭滕小祺应晟斌
易 娜 ,贺双旭 ,滕小祺 ,应晟斌
(浙江长征职业技术学院,浙江 杭州 310023)
0 引言
我国养殖产量居世界第一,其中以螃蟹、虾和牡蛎养殖为最。水产养殖对水质、水深、含氧量等都有一定要求,以螃蟹、虾、牡蛎养殖为例:螃蟹喜欢生活在河滩上的洞穴和沙石水草中,水流不能急,不能有风和阴凉,水深需要l m以上、水质清洁;鱼蟹混养是池塘养蟹的一种模式,要求水质干净,能够有0.3 m左右透明度;养殖南美白对虾适宜深度在1.5 m~2 m,排水系统良好,水质干净且溶氧量高;牡蛎养殖需要选择潮流畅通、饵料丰富、风浪平静、水深在4 m 以上、盐度较低的海区。人工养殖时,由于成本和技术原因,往往放养密度较大,水面又较小,因此除了增加增氧设施外,还需要一种小型设备,在不惊扰水产的情况下,可以近距离地观察其活动、生长和吃食等情况,养殖户可以据此立即进行投料、换水等。仿生机械鱼是将仿生学结合到渔业养殖领域,使监测设备模拟鱼类游动,其小体积、高灵活性、低污染、无扰动的特点,使其能在不同的水域环境中进行水下监测。所设计的清道夫型仿生机械鱼主要用于水下渔情分析、定位、查询和水下观光[1-10]。
1 清道夫型仿生机械鱼主要性能指标和功能
清道夫型仿生机械鱼性能指标如表1 所示,主要功能如下。

表1 清道夫型仿生机械鱼性能指标
1)隐形。仿生清道夫鱼型设计在任何状态下都不会惊扰养殖水产。
2)动力。由螺旋桨转动结合舵面转向产生推力和方向控制。
3)动态监测。能够随时工作,看清水下情况,便于观察水产活动、生长和吃食情况。
4)水下检查。能够进行水质探测,近距离观察所投喂的饲料、药品以及水产的食用情况,防止外来物种入侵或人为恶意投毒。
5)搭载挂钩。可实现近距离精准投料,观察水产的喜好。
6)可扩展接口。可实现搭载多种搜寻、探测传感器,实现机器快速就位,查明水域深度、水下温度、水压、水流方向、流速和水质等情况。
7)配备照明显示控制系统。可实现对水下图像的还原、增强、处理功能,可适应各种复杂黑暗水域的工作。
2 设计的基本思路
根据研究背景,本产品设计重点聚焦在螃蟹、虾、牡蛎的养殖和农业观光的角度,在此基础上进行相关潜水器设计。
2.1 整体设计
仿生机械鱼的整体设计需要解决以下问题。
1)结构问题。根据伯努利原理,仿生机械鱼的外形采用流线型结构,使其在运动中可以有效减少水的阻力,从而节约能源。在进行仿生设计时,该问题是必须要考虑的因素。
2)动力控制问题。为了保证仿生机械鱼能够实现直线运动、左右转弯、上浮和下潜等各种游姿,需要探究仿生机械鱼的有效动力与控制策略,用不同的“电机+螺旋桨”来进行方向控制。
3)实时通信问题。实时通信是仿生机械鱼水下运动和陆上控制平台的连接桥梁,它可以实时把仿生机械鱼游动采集到的数据和电机的运转情况传送到控制平台,同时能够将传感器收集的信息传递到控制平台。
2.2 局部设计
1)外形结构设计。如图1 所示,根据伯努利原理,仿生机械鱼的外形采用流线型结构,目前大部分潜水器是类似于潜艇的回转细长体[10]。随着仿生技术的不断发展,仿鱼类形态甚至是运动方式的潜水器将会不断发展,本设计主体结构为流线型回转细长体,仿生机械鱼外观如图2所示。
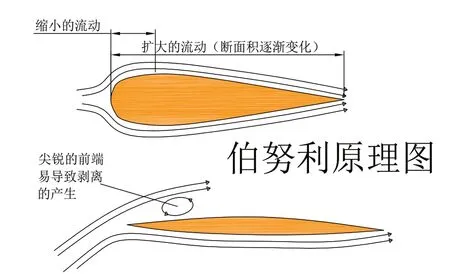
图1 伯努利原理

图2 仿生机械鱼外观
2)动力与运动设计。为了保证仿生机械鱼能够实现直线前进与后退运动、左右转弯、快速上浮和下潜等各种游姿。本设计采用三台电机提供动力,其中两台安装在仿生机械鱼尾部,通过电机的正反转实现机械鱼的前进与后退、左右转弯运动;另一台电机安装在仿生机械鱼的中部重心处,并从中设置通道,通过电机的正反转和伞齿轮传动机构实现鱼的上浮和下潜运动,该部分采用密封防水设计。仿生机械鱼装配如图3所示,远程遥控器外观如图4所示。

图3 仿生机械鱼装配

图4 仿生机械鱼远程遥控器外观
3)控制部分设计。本设计通过遥控的方式实现对三台电机的控制,控制部分采用密封防水设计。清道夫型仿生机械鱼电气原理如图5所示。

图5 清道夫型仿生机械鱼电气原理
4)通信单元设计。本设计的通信单元主要用于水下图形、图像的反馈,采用刚性有线电缆拖曳的方式进行通信,此部分采用密封防水设计。
5)附件设计。如图6 所示,仿生机械鱼在头部设计有鱼饵钩、磁力吸盘、探头辅助器、固定器等附件。对于重量较轻和体积较小的物件可以在发现后直接获取。头部的连接与仿生机械鱼的结构骨架是整体,不影响仿生机械鱼的强度。

图6 仿生机械鱼附件
6)照明单元设计。在摄像头周围设计有6 个LED灯,并可调节亮度,本部分采用密封防水设计。
7)材料设计。除了电气和动力部分外,其余材料采用ABS塑料或PS 塑料,以减轻重量,节约能源。
2.3 关键技术
本课题研究背景和设计思路决定了产品的关键技术,重点在以下方面。
1)仿生技术。依据伯努利原理,为减小运动中的水阻力,潜水器的外形采用流线型鱼形设计。
2)材料技术。由于其重点应用在水产养殖和农业观光,对长时间水下作业有要求,考虑到具体作业环境,作业时间至少需要30 min 以上。因此,仿生机械鱼的主体材料需要选用密度小、耐海水腐蚀、噪声小的轻质复合材料。
3)通信技术。由于螃蟹、虾、牡蛎的养殖水深最多只有4 m~5 m,为了有效监测、传输数据,本项目的通信方式主要采用双绞线电缆,成本低、响应快,选择长度为15 m 的电缆。
4)密封技术。本课题应用背景决定了该产品在0.5 h 水下作业能够满足要求。难点在于水下航行时不能短路,因此,产品的防水密封很重要。
上述技术在本设计中均有采用。至于智能控制技术、水下目标探测与识别技术以及水下导航(定位)技术等非本项目重点,在本设计中没有采用,可在应用中视市场需要酌情开发。
3 理论设计计算
本研究设计的仿生机械鱼体积不大,但由于结构原因自身具有一定的质量(200 g),在水下运动速度不需要太快。考虑到水下作业需要六向移动,故而在设计时主要考虑的因素是整体质量、直流电机转速、螺旋桨尺寸等产生的推力。通常一个螺旋桨在不同转矩的电机下产生的推力不同,不是越大越好,也不是越小越好。直接影响螺旋桨性能的主要参数如下。
1)直径D:相接于螺旋桨叶尖的圆的直径。通常,直径越大,效率越高,但直径往往受到吃水和输出转速等限制。
2)桨叶数N。
3)转速n:每分钟螺旋桨的转数。
4)螺距P:螺旋桨旋转一周前进的距离,指理论螺距。
5)滑失率:螺旋桨旋转一周,仿生机械鱼实际前进的距离和螺距的差值与螺距之比。
6)螺距比:螺距与直径的比(P/D),一般在0.6~1.5。通常,高速轻载船选取的值比较大,低速重载船选取的值比较小。
7)盘面比:各桨叶在前进方向上的投影面积之和与直径为D的圆面积之比。通常,高转速的螺旋桨所取的比值小,低速、大推力的螺旋桨所取的比值大。例如,拖轮的螺旋桨盘面比大于1.2,甚至更大的情况也不少见。
对于仿生鱼等小型潜水器而言,可以参考公式(1)。
式中:F推力—螺旋桨推力,单位N;D—螺旋桨直径,单位cm;S—螺距,指螺旋桨旋转一圈推动距离,单位cm;L—螺旋浆宽度,单位cm;N—电机转速,单位rad/s;P—大气压力(1 标准大气压,1 000 m 以下基本可以取1);f—经验系数(0.000 25)。
本项目螺旋桨直径1 cm,螺距30 cm,螺旋浆最大宽度0.5 cm,直流电机转速30 rad/s,计算可得:
F推力=(D×S×L×N2×P×f×1 0)×9.8/1 0 0 0=(1×30×0.5×302×1×0.000 25×10)×9.8/1 000=0.33 N,如果前进和后退采用两台电机同时作用,则可产生推力F推力=2*0.33=0.66 N。
由上述计算可知,上浮下潜用一台电机能产生0.33 N 的推力,前进和后退两台电机能产生0.66 N的推力。由于物体在水中或多或少都会产生浮力,所以本项目设计中只要电机选用合适,就符合设计要求。
4 使用方法及使用性能分析
4.1 使用方法
1)提前1 h 将仿生机械鱼充好电,如果需要投喂饵料,也要提前备好。
2)把清道夫型仿生机械鱼的数据线连接到手机显示屏或电脑显示器等设备上。
3)将遥控器及手机通过连接器整体装配起来,如图7 所示,成为一个整体,调节旋钮开关检查灯光是否正常。

图7 清道夫型仿生机械鱼全套系统
4)将清道夫型仿生机械鱼放入水中,在所需的水域进行探索,寻找水产;操作人员可在岸边或船上操作遥控器,通过屏幕确定仿生鱼的姿态和行进方向来搜索并观测水产;也可利用其头部挂钩钩住饵料(药品)观察水产吃食的情况;当水中亮度不足时,可调节旋钮开关打开灯光进行补光。
4.2 性能分析
如图8 所示,经过实际下水测试,清道夫型仿生机械鱼的结构合理,采用可拆卸零部件,水密性好;整套系统的可装配性与工艺性好;操作简单方便。图9(a)、图9(b)分别是用本装备观察白天和夜间水下渔情的照片。

图8 下水测试现场

图9 水下渔情
5 创新点
1)采用了清道夫鱼的流线型轮廓。一方面,水阻低,可节约能耗;另一方面,在进行渔情调查或水下环境调查时,隐蔽性强且不易被其他品种的大鱼食用。
2)水下可视化。仿生清道夫鱼自带照明和水下探头,当水中能见度低时,可以人为调节光源亮度,以看清水下状况,适用于所有水下场景。
3)仿生机械鱼头部的附件可进行拆卸、改装和扩展。可实现使用不同的饵料喂养水产的功能。
6 结语
清道夫型仿生机械鱼具有适用面大、成本低、能耗小、运动范围广、能在机动性能要求比较高的水下环境工作等优点,使用它可以进行水下渔情分析、定位、查询,且具有水下观光等功能。但智能控制技术、水下目标探测与识别技术以及水下导航(定位)技术等非本研究重点,在设计中没有采用,后期可根据产品在应用市场中的需要酌情开发。该产品市场化后成本不高,销售价格也不高,符合农村市场购买力。
