一种适用于湿地地形的植树机器人设计*
2024-05-07胡俊泽陈柯良罗世维李雨婷
胡俊泽 , 余 江 , 陈柯良 , 罗世维 , 李雨婷
(1.广东海洋大学机械工程学院,广东 湛江 524088;2.广东海洋大学机器人实验室创新团队,广东 湛江 524088;3.广东海洋大学电子与信息工程学院,广东 湛江 524088;4.广东海洋大学管理学院,广东 湛江 524088)
0 引言
湿地具有复杂的生态系统和地形特征,其中红树林是最具有代表性的生态环境之一。红树林因其密集发达的支柱根而著称,被誉为“海上卫士”,能够抵御台风和海浪的侵袭,对沿海地区具有重要意义。然而,由于湿地地形的复杂性[1]和传统植树方法的局限性,红树林的保护和恢复面临巨大挑战[2]。尽管目前已经存在一些植树机器人,但它们主要适用于一般地形和树木类型的种植,并未特别针对湿地地形和红树林的特点进行优化设计。此外,传统农业机械也无法直接应用于红树林的种植和修复。
因此,本研究旨在设计一种适用于湿地地形的新型植树机器人,结合红树林的地形与种植特点以及机器人技术,通过优化结构设计,实现机器人在复杂湿地地形中的自动化和高效化种植。这种机器人可以提高种植效率、降低劳动成本并解决人力不足的问题[3],为红树林生态系统的保护和恢复提供重要技术支持。本研究对于推动湿地植树机器人的技术发展具有重要的实践意义和理论价值。
1 机器人整体介绍
1.1 机器人外形结构
机器人整体外形结构如图1 所示,以铝型材为基本搭建框架,采用12.9 级杯头内六角螺丝固定,衔接处以铸铁角码辅助连接,更加紧固。此外,在部分受力结构如履带承重轴,使用高碳钢焊接方式连接,使其整体质量尽可能轻量化,有助于防止陷入滩涂地,增强其灵活性。

图1 机器人整体外形结构
1.2 机器人全流程执行动作
装载完树苗的机器人在收到上位机指令后,先移动到指定的种植区域,再启动自动植树模式,开始自动种植树苗。
首先由机器人中部的钻头向下钻出待植树的树坑,然后机器人向前移动,当机器人底部的红外光电传感器检测到树坑时,机器人停止前进,缓慢移动调整至树苗对准树坑为止,此时,储存苗仓的步进电机运作,将树苗移动放入导向道,当检测到导向道有树苗进入后,导向道底部的门板打开,树苗通过回填装置的主体落入树坑中,然后由压泥板向下按压存放在回填装置中的泥土,泥土通过回填装置上的圆孔卸往地面,填满树坑内的空隙,夯实刚植入的树苗。上述过程全部完成以后,机器人继续移动,前往下一个合适的植树点[4]。
2 机器人部分机械结构设计
2.1 履带底盘机构设计
红树林的生长环境以沿海滩涂为主,机器人若以传统滚轮作为行进机构,在行进过程中容易陷入泥土中,为了解决这一问题,在设计时使用履带。履带整体结构采取轻量化设计,负重轮由2 个主动轮和4 对从动轮组成,履带底盘机构如图2所示。

图2 履带底盘机构
该机构排布简洁有序,后期装配和零件更换更加方便,采用12.9 级内六角螺丝和8 级法兰螺母配合连接,在保证拆卸方便的同时也不失连接强度,履带结构方面采用具有重量轻、强度高等优点的橡胶履带。
相比于传统滚轮,履带的接触面积更大,可以有效降低机器人对地面的压强,使其不易陷入淤泥之中,同时,履带表面附有纹路、凹槽,可以大大增加机器人与地面接触时的摩擦力,使机器人在运动过程中不易打滑,提高机器人对能量的利用效率。
如图3 所示,履带采用双向可调节的张紧轮调节方式,主要作用是为履带提供预张紧力[5]、延长履带寿命、提高通过性能以及调节履带的松紧程度。通过调整张紧轮的位置和张紧度,可以确保履带与地面之间的接触始终牢固,提供良好的牵引力和操控性。此外,适当的张紧度还能减少履带与其他部件的摩擦和磨损,延长履带的使用寿命。根据不同的地形和工作条件要求,调整张紧度可以改变履带与地面的接触表面积和压力,从而提高车辆的通过性能。同时,根据行驶速度、工作负荷或路面条件,调节张紧轮能够改变履带的松紧程度,以适应不同的工作环境。
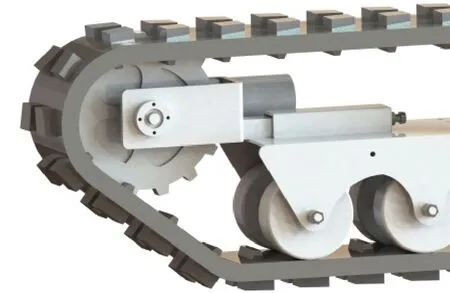
图3 履带张紧轮调节部分
凭借履带的大轮径优势,机器人可轻松越过石块、滩涂、水坑等障碍物,而如果遇到无法越过的障碍物,机器人会通过视觉识别,并通过Mesh 技术发送信号到终端[6],分析计算后,自动调整行进方向。如果机器人因侧翻等因素导致无法运动,会向外发送求救信号,等待技术人员前来检查与维修。
2.2 钻孔机构设计
钻孔机构如图4 所示,主要由电机直角固定板、永磁直流有刷电机、螺母螺丝、大扭力推杆、钻机钻头组成。该结构主要需完成的工作是对湿地进行钻孔,由上述组成部分互相配合使钻机钻头纵向移动。钻机钻头的动力来源于永磁直流有刷电机,其具有体积小、效率高、结构简单、用铜量少等优点。有刷电机带动钻头高速转动,大扭矩推力推杆使得钻头跟随下底板纵向移动开始钻土。在钻出一个深度适宜的孔后,钻头暂时停止转动,竖直向上移动,而后重新开始转动,将附着在钻头上的泥土甩出钻头,并在孔的周围形成圆环状土堆,工作结束。

图4 钻孔机构
2.3 导苗机构设计
导苗机构如图5 所示,主要由圆管、大扭矩推力推杆、小型推杆、金属管卡、螺丝螺母、铲头与推杆固定架等组成。其中,圆管、小型推杆、开合器与推杆固定架组成导苗管;铲头与导苗管相连接后固定于螺母固定件上,使得铲头能在一定方向上直线移动;大扭矩推力推杆的一端固定于车体上,另一端固定在导苗管上。工作时,先从储苗仓取出树苗置于导苗管中,然后纵向移动将树苗送入钻孔结构事先挖好的孔洞中,而后再通过小型推杆将铲头打开,接着将铲头移出孔洞,整个结构竖直向上移动,工作结束。

图5 导苗机构
2.4 覆土机构设计
覆土机构如图6 所示,主要由加工后的铝板、加工后的4040 铝型材、2020 铝型材、十字连接板、踏板以及双轴舵机组成。在送苗机构移出孔洞后,双轴舵机便会驱动由铝板、铝型材、十字连接板组成的平行四边形连杆机构运动,控制踏板上下运动,将树苗彻底压入土中并压实。

图6 覆土机构
2.5 储苗仓机构设计
储苗仓机构如图7所示,将其进行可堆叠化设计,目的在于提高储苗量,同时实现更高的空间利用率。该机构将树苗的头部放入滑槽,尾部紧贴内壁,以实现对树苗的储存。其运行方式为由舵机旋转带动十字送料板将树苗送入导苗筒中,在重力的作用下,下一棵树苗会来到前一棵树苗的位置,重复以上操作,储苗仓功能结束。该储苗仓机构最大的亮点是能够安全堆叠,节省空间,并提供更大的储存容量。这不仅可以提高农业生产效益,还可以减少仓储成本和占地面积。储苗仓的可堆叠设计还方便运输和搬运,可提高树苗运载量,并且便于管理和组织苗木。通过这种设计,可以使种植更加高效,实现可持续发展。

图7 储苗仓机构
3 机器人机电一体化控制部分设计
3.1 嵌入式系统下位机设计
嵌入式系统下位机为系统的底层,用于执行控制、数据处理和设备驱动等任务。具体为接收上位机发出的信号控制各个功能部件执行命令以及采集各个传感器部件的信息发送回上位机。其中,还需有连接各个传感器与MCU 的PCB 以及调试部分,MCU选择性能强大、引脚口较多的STM32H750VBT6。
3.1.1 PCB设计
PCB 在电子设备中扮演着关键的角色,它提供了电气连接、机械支持、电气隔离、信号分配、散热、封装、组装和维修等功能,同时有助于节省空间和提高设备性能[7]。该部分的设计逻辑主要为引出MCU 的I/O 口,方便各个传感器与其直接连接,简化线路。
3.1.2 程序设计
程序的编写逻辑主要通过串口通信与上位机进行实时数据传输[8],内部封装有串口接收函数,当接收到数据后,会有一个执行函数,对接收到的数据进行译码操作,针对破解的译码会有对应的执行函数,由此便可根据上位机发送的数据执行相应操作。
发送数据同理,发送与其接收数据包相同的数据串,上位机进行接收并通过译码获得各个传感器返回的数值,再通过二次译码得到环境监测传感器的具体数值。
3.2 嵌入式系统上位机设计
该部分主要用于接收控制终端发送的指令,并通过译码将需要转述给下位机的指令通过串口通信转述给下位机,进而实现通过控制终端控制机器人;同时,也负责将采集到的数据反馈给控制终端。所使用的MCU 为树莓派4B,该硬件使用较为方便,可参考项目较多,大大降低了开发难度[9]。
3.3 服务器端设计
该部分主要用于对所有环境数据进行统计,最终呈现出生长情况最好的环境条件发送给客户端;对输入的画面进行算法解算,并根据客户端要求规划路径发送给上位机;对接客户端,与人直接进行交互。
从广义上来讲,服务器端可充当机器人的大脑部分,上位机可类比为神经,下位机可类比为脊椎,各传感器可类比为感官,所有指令都由操作人员经由客户端发出,做到远程控制多台机器人[10]。
4 总结与展望
本研究深入探讨了一种专门针对湿地地形,特别是红树林滩涂区域的全自动植树机器人设计。通过对其特殊结构,包括行进机构、钻孔机构、树苗安放机构以及泥土回填机构的详细设计阐述,本研究展示了该机器人在种植红树林幼苗过程中的高效性和灵活性。与传统的植树机器人相比,这种新型机器人的设计更符合湿地地形的工作需求,其快速回土的能力也显著提高了树苗的成活率。此外,该机器人的设计还考虑到了对不同尺寸树苗的适应性,使其应用范围更加广泛。
随着科技的不断进步和人们环保意识的增强,未来的植树机器人将会更加智能化和高效化。对于红树林种植修复事业来说,未来的研究方向可能会集中在如何进一步提升机器人的自动化程度,例如通过引入更多的传感器和智能化算法来实现对环境的精确感知和适应。此外,将机器人技术与其他生态修复技术相结合也十分重要,例如利用无人机进行种子的精确投放,利用生物技术提升树苗的生长速度等。最后,对于种植机器人来说,如何实现在复杂地形中的高效移动和精确操作,将是未来研究需要解决的关键问题,这可能需要通过引入更先进的导航和控制技术来实现。
