基于连续变焦的大口径长焦距的探测成像一体化光学系统设计
2024-01-29魏锦洋李旭阳谭龙玉袁灏任志广赵佳文姚凯中
魏锦洋,李旭阳,谭龙玉,袁灏,任志广,赵佳文,姚凯中
(1 中国科学院西安光学精密机械研究所 空间光学技术研究室,西安 710119)
(2 中国科学院大学,北京 100049)
(3 上海航天控制技术研究所,上海 201109)
0 引言
目前人类对太空的观测与探索在持续进步,太空逐渐成为信息时代新的重要发展领域,各国都希望在太空领域信息获取上占据主导地位。伴随着太空领域的不断探索,全球每年都有数以千计的卫星被送上太空,各种载荷环布于太空中,地球的外围已经被数量庞大的人造物包围[1-3]。在这种情况下,这些人造物难免发生碰撞产生空间碎片。据统计,目前环绕地球直径10 cm 大小的空间碎片约有数万个,俄罗斯的在轨卫星曾经就被美国的报废卫星产生的空间碎片击中过,产生了巨大的无法弥补的损失。
美国的天基探测及成像系统发展的较早,已经成功构建了自身对空间碎片观测的完整体系[4]。美国于2002年开始筹备天基空间观测系统(Space Based Surveillance System,SBSS)计划,SBSS 卫星可对同步地球轨道以及近地轨道的空间目标进行编目,同时对空间目标进行跟踪观测[5]。我国对空间碎片的观测起步较晚但是发展迅速,已经逐渐设立起成体系的空间碎片探测识别系统。在光学目标观测等任务中,通常在搭载成像系统的同时还会搭载探测系统,先对目标物进行探测,然后再切换至成像系统进行目标识别。搭载的探测系统因为体积与重量的限制,口径较小,探测暗弱目标的能力较弱。若采用分光式的一体化系统,为了解决分光导致的光能量分配问题,系统的口径比较大,同时两个通道需要两个探测器,配套的机械电子结构翻倍。
本文设计了一种基于连续变焦的探测成像一体化光学系统,通过里奇-克列基昂(Ritchey-Chretien,RC)结构与变焦结构进行光瞳匹配的方式,形成了短焦距大视场探测,长焦距小视场成像的基本工作模式。在光学系统结构优化上,为缩短系统总长使用了两块反射镜,通过折转两次光路极大的压缩了系统总长。设计结果表明采用共用孔径连续变焦式结构可以解决光能量分配不均的问题以及探测暗弱目标能力弱的问题。在连续变焦过程中中间焦距状态均可成像且成像质量良好,目标物不会在变焦过程中丢失,可实现目标的连续跟踪。
1 理论基础
1.1 RC 系统设计理论
RC 系统是改进型的卡塞格林系统,将卡塞格林系统的主次镜面型改为二次曲面来消除彗差和球差,对初始结构进行设计。首先根据光学系统的焦距、相对孔径求得系统主镜的通光孔径。根据要求确定光学系统的总长,进而根据系统总长选择合理的工作距Δ。以三级像差理论为基础,根据主镜以及系统整体的焦距确定放大率以及主次镜的曲率半径,由于RC 系统存在遮拦比,最后需要根据遮拦比进一步的优化参数[6],得到初始结构,如图1所示。

图1 RC 系统结构Fig.1 RC system structure
系统遮拦比α与次镜的物距l2为
根据消彗差及消球差条件可得主次镜的面型参数,有
联立以上各式即可求得RC 系统的初始结构参数。
1.2 变焦系统设计理论
变焦系统是通过改变透镜组元的位置实现焦距以及放大倍率的变化,同时像面位置保持不变。变焦系统由前后固定组、变焦组、补偿组组成,通过改变变焦组与补偿组的相对位置实现焦距的变化。变焦组光焦度取负值,通过位移来实现变焦,补偿组为正值,通过位移实现对像面的补偿[7]。变焦结构如图2所示,

图2 变焦结构Fig.2 Zoom structure

短焦位置时的β2为
短焦位置时的β3为
长焦位置时的β′2为
长焦位置时的β′3为
L2的位移为
L3的位移为
长焦位置时L1与L2之间的距离为
长焦位置时L2与L3之间的距离为
联立以上各式即可求得变焦组与补偿组在长焦与短焦位置时的放大率,移动距离以及两者间的距离。
2 光学设计
2.1 一体化系统入瞳直径及焦距计算
探测系统通过探测目标的星等大小来表示其接收信号的强弱,计算公式[10]为
式中,E0为目标星等为0 时的辐照度,E0=2.068×10-8W/m2,Em为目标在系统入瞳处的辐照度,m为目标星等值。本文设计的探测分系统是探测亮度为14 等星的空间目标,通过式(16)计算得到,探测分系统入瞳处的辐照度Em至少为5.195×10-8W/m2。
系统的有效入瞳直径由探测器的信噪比以及入瞳处的辐照度决定,系统入瞳直径为[11]
式中,Eph为单光子能量,τ为系统透过率,QE为探测器量子效率,t为探测器积分时间,RSNth为信噪比阈值,l1为像元边长,Nc为系统噪声,l2为单视场像点直径,B为非抑制杂光辐射在单个像元上产生的信号电子数。本文中,τ=0.46,t=0.25,Eph=hc/λ=3.4×10-19J,QE=50%,RSNth=6,B=4,Nc=19.36,由于存在中心遮拦,实际入瞳的计算公式为
式中,α为系统的面遮拦比,联立式(17)、(18)得到系统的最小实际入瞳直径为260.9 mm,考虑到系统需要获得充足能量,取D=280 mm。
系统的焦距计算公式[12]为
式中,2y′为系统探测器对角线长,ω为系统半视场角。在本文中,探测系统选用全视场0.5°,成像系统选用全视场0.18°,计算得到探测系统的焦距约为700 mm,成像系统焦距约为3 500 mm。
2.2 设计参数
基于以上分析,选择合理的系统设计参数,如表1所示。
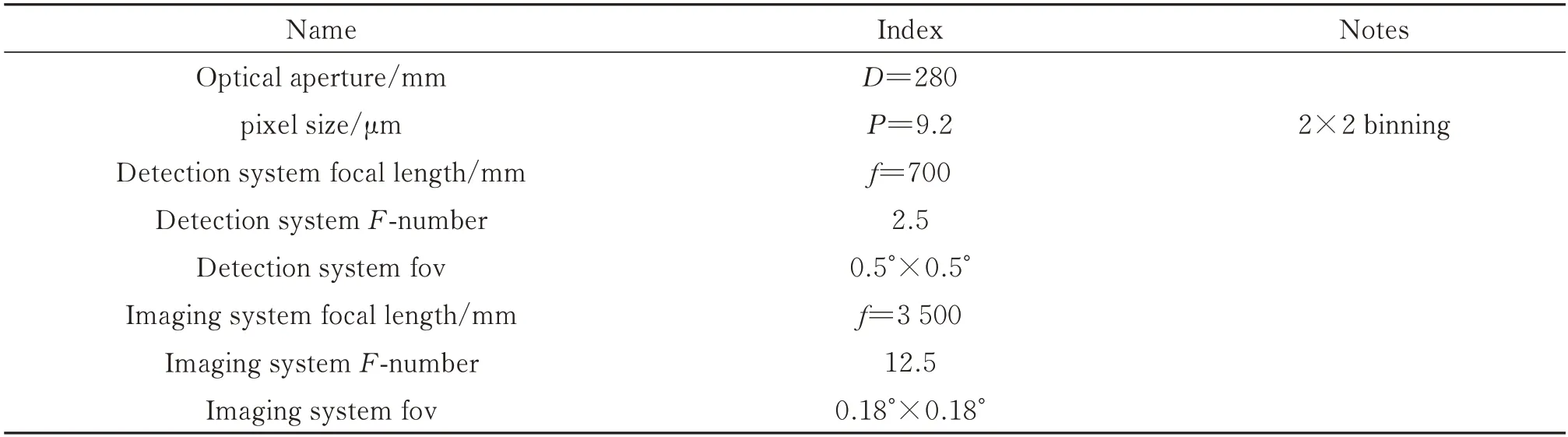
表1 设计参数Table 1 Design parameters
2.3 初始结构设计
本文使用折反式的光学系统完成设计。折反式光学系统综合了折射式与反射式的优点,主镜口径可以与入瞳相当,焦距限制较小,反射式部分不会引入色差,可以很好的分担光焦度以减少成本,压缩光路以及通过一些特殊结构实现一体化和像差校正等功能;折射式部分使用全玻璃材料提供较高的自由度,优化潜力巨大,通过校正镜组校正轴外单色像差[13-15]。
由于系统在变焦过程中F数变化较大,因此选择将反射部分与折射部分的初始结构分开设计,然后通过光瞳匹配的方式将两部分进行合并,合并后再进行进一步的优化。分开设计可以解决在优化过程中达不到理想的效果、系统像差难以校正的问题。后组变焦初始结构第1~3 片透镜为前固定组,光焦度为正;第4~6 片透镜为变焦组元,光焦度为负;第7~9 片透镜为补偿组元,光焦度为正;第10~12 片透镜为后固定组元,主要功能为消像差,光焦度不做要求。后组变焦初始结构如图3所示。

图3 后组变焦结构各组元状态Fig.3 Status of each component in the rear zoom structure
前组初始结构由RC 加校正镜构成,分为探测和成像两种模式,初始焦距都设置为2 100 mm,具体结构见图4。

图4 RC 初始结构Fig.4 RC initial structure
2.4 设计结果
两部分通过光瞳匹配的方式合并后进行优化,通过两片反射镜缩短系统长度,使像面轴向位置处于次镜右侧,在连续变焦过程中变焦组元与补偿组元两部分整体相对移动,像面位置不变,透镜表面均为球面,具体结构见图5,各动组相对位置如表2。

表2 各动组相对位置Table 2 Relative position of each moving group

图5 系统最终设计结果Fig.5 Final design result of the system
3 系统分析与评价
3.1 探测分系统
探测分系统的性能由点列图,包围能量分布等指标进行评价,如图6、图7所示。

图6 探测变焦位置点列图Fig.6 Spot diagram of detection zoom position
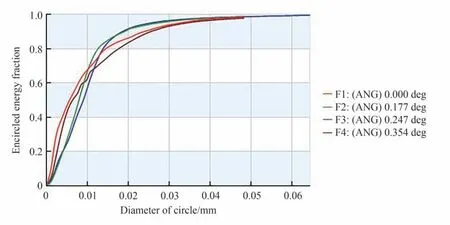
图7 探测变焦位置包围能量分布Fig.7 Surrounding energy distribution of detection zoom position
探测器采用2×2 像元合并模式,合并后单个像元大小为9.2 μm。由图6、图7 可知探测变焦位置在各个视场的弥散斑均方根直径最大值为12.296 μm,满足弥散斑分布在2×2 个像元内的要求;各视场80%能量集中在直径17.671 μm 的包围圆内,小于2×2 个像元尺寸,整个探测系统性能良好。
3.2 成像分系统
系统的成像质量由点列图,调制传递函数(Modulation Transfer Function,MTF)进行评价,如图8、图9所示。

图8 成像变焦位置点列图Fig.8 Spot diagram of imaging zoom position

图9 成像变焦位置MTFFig.9 MTF of imaging zoom position
由图8、图9 可知,成像光学系统在f=3 500 mm 时各视场弥散斑均处于艾里斑内,系统调制传递函数接近衍射极限,并且中间变焦位置各个视场在奈奎斯特频率54.3 lp/mm 处的MTF 在0.31~0.36 之间,可以知道在变焦过程中此系统也能连续成像。
3.3 变焦凸轮曲线
移动组元的通光孔径最大为38 mm,将套筒孔径大小设计为60 mm,则套筒周长为188.4 mm。可设计的最大纵向距离为180 mm 左右,即套筒的最大转动周长设计为180 mm。则凸轮曲线如图10所示,图11 为各组元相对位置,图12 为凸轮曲线套筒示意图。

图10 变焦凸轮曲线Fig.10 Zoom cam curve

图11 各组元相对位置Fig.11 Relative position of each component
图12 凸轮曲线套筒Fig.12 Cam curve sleeve
横坐标变焦组的绝对位置为变焦组第一片透镜与前固定组最后一片透镜的距离,补偿组的绝对位置为补偿组的第一片透镜与前固定组的最后一片透镜的距离,纵坐标动组轨迹横向展开位置为套筒的转动距离,凸轮曲线套筒上的凹槽轨迹可根据图12 的变焦凸轮曲线画出,即将凸轮曲线套筒展开即为变焦凸轮曲线轨迹,最终在转动套筒时,根据套筒的不同转动周长来实现变焦。在变焦过程中变焦组与前固定组的距离不断增大,补偿组与变焦组之间的距离不断减小。经过计算可知,变焦组凸轮升角最大为18.55°,补偿组凸轮升角最大为21.33°,凸轮升角压力较小,且曲线没有拐点,满足设计要求。
3.4 公差分析
对系统进行公差分析可以对其可加工性做出判断,本文对设计的探测成像一体化系统选取两个典型的焦距段进行公差分析,即探测短焦段,f=700 mm,成像长焦段,f=3 500 mm。对于探测系统的公差分析,通常通过蒙特卡洛仿真实验对系统弥散斑进行分析,对于成像系统的公差分析,通常观察MTF 的变化情况来进行分析。
在公差分配过程中,首先需要根据加工装调过程中容易产生的公差进行公差类型的确定,然后根据目前加工装调水平的情况给出不同公差类型的具体值。在公差分析时,以实际装调过程为准,将主镜作为基准。同时,以主次镜间距以及像距作为补偿量。公差类型及具体公差值如表3所示。
对于识别状态,以MTF 下降的概率作为判据,基于以上公差值进行公差分析。
由图13 分析可知,在表3 给定公差下,子午方向系统边缘视场80%概率下MTF 下降了0.05 左右,弧矢方向系统边缘视场80%概率下MTF 下降了0.07 左右,由此可得在成像状态下,系统满足表3 较为宽松的公差值,系统满足实际的加工装调要求。

图13 子午与弧矢方向MTF 下降概率图Fig.13 Probability graph of MTF descent in meridian and sagittal directions
对于探测状态,需要对弥散斑的弥散情况进行分析,来判断上述给定公差下的探测能力,结果如图14所示。
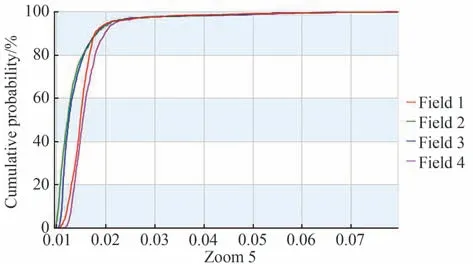
图14 蒙特卡洛-包围圆能量分析Fig.14 Monte Carlo surrounding circle power analysis
经过1 000 次蒙特卡洛仿真实验,由图14 我们可以得到边缘视场形成的弥散斑直径80%的概率为18.1 μm,公差分配前为17.4 μm。其他视场弥散斑直径80%概率下均小于18.4 μm。由此可以得到,系统处于探测状态下在上述公差分配下满足使用要求。
4 结论
本文实现了基于连续变焦的大孔径探测成像一体化光学系统设计。通过光瞳匹配法建立初始结构,通过变焦组和补偿组的相对移动实现了长焦距状态下5 倍变倍比的连续变焦系统的设计。系统入瞳口径280 mm,工作在450~850 nm 光谱范围内。系统探测时F数为2.5,全视场0.5°×0.5°弥散斑在两个像元大小范围内包围圆能量大于80%,可以实现14 等星的探测,探测能力强;系统成像时F数为12.5,系统全视场0.18°×0.18°弥散斑均在艾里斑内,MTF 接近衍射极限;在中间变焦位置处成像质量良好;变焦组凸轮曲线升角小于18.55°,补偿组凸轮曲线升角小于21.33°;通过两片反射镜使系统长度缩短。该系统具有大孔径、多用途、总长短、能够在探测端切换到成像端变焦过程中连续成像且成像质量良好等优点。集成度很高,能够用于目标物的识别。为实现对空间碎片的连续跟踪,本文的设计方案采用变焦方式进行探测与成像通道的切换,且像面位置无变化,无需在切换模式时调整焦面位置,降低了相机功耗,系统总长较短。此设计为以后实现目标物连续跟踪的探测成像一体化光学系统提供了参考。