基于多波长干涉的瞬态轮廓检测Mirau显微镜
2024-01-29龚玉婷吕鑫刘维孔明
龚玉婷,吕鑫,刘维,孔明
(中国计量大学 计量测试工程学院,杭州 310018)
0 引言
随着光学加工技术向着精密化和复杂化的方向发展,越来越多具有复杂面形、高设计自由度的微小光学元件广泛应用于光学系统的设计和制造中。微小光学元件的加工阶段决定其性能指标,在该阶段需要对不同空间频率的表面进行测量。相移干涉显微镜因非接触、测量精度高而广泛应用于元件微观表面轮廓检测[1-4]。
单波长Mirau 干涉显微镜测量精度高、测试重复性好,但其测量范围小。从干涉条纹图像中求解得到的相位信息分布在[0,2π]区间,当被测物体表面对应的相位跃变超出2π 时,将发生混叠现象,出现2π 相位模糊问题,使得包裹相位图缺少连续性。因而要求相邻两像素点间光程差需小于λ/2,这限制了单波长干涉测量的动态范围。微观表面轮廓检测系统的检测精度在实际测量中容易受到环境的干扰,如环境振动和光源稳定性等[5-8]。传统的单波长Mirau 显微镜是通过压电陶瓷(Piezoelectric Ceramic Transducer,PZT)机械移动实现移相,机械移动容易受环境振动的干扰,移相采样时间间隔长,无法实现瞬态测量;同时由于条纹对比度不可调,无法高精度测量具有不同反射率的待测表面[9-12]。
为解决上述限制微观表面轮廓高精度检测的问题,提出了一种多波长Mirau 偏振干涉显微镜,来实现不同动态范围的宏观面形和表面粗糙度等显微结构的瞬态检测。系统采用R、G、B 三个单色光的发光二极管(Light Emitting Diode,LED)作为多波长光源;通过线栅偏振片获得不同方向的线偏振光,与偏振分光板组合可实现5%~95%大范围分光比调节,从而调节条纹对比度;偏振相机通过内部传感器上四个方向的线栅偏振片实现对系统中测量光束的偏振态调制,达到基于四步移相的高精度面型重构,避免了PZT 移相存在的非线性、迟滞、蠕变等机械误差影响[13-16]。该系统可高精度测量具有不同反射率大动态范围的微观轮廓,能广泛应用于高自由度的微小光学元件表面轮廓测量。
1 多波长Mirau 偏振干涉显微镜原理
1.1 系统布局
基于多波长干涉的瞬态轮廓检测Mirau显微镜系统布局如图1,其基本光路原理为:系统利用分光棱镜聚集R、G、B 三个单色光的LED 作为多波长光源,三个单色LED 发出的光经准直透镜、线偏振片和分光棱镜汇聚成一束确定方向的线偏振光,然后进入由显微物镜、偏振分光板以及参考镜组成的Mirau 偏振干涉物镜。在到达偏振分光板时,线偏振光被分为振动方向互相垂直的两部分,一部分是透射光p,作为测试光透射至待测样本表面反射后回到偏振分光板,另一部分是反射光s,为参考光经参考镜反射后回到偏振分光板与p 光汇合,这两束携带相位信息的线偏振光经偏振分光棱镜和1/4 波片后变为左旋和右旋圆偏振光,最后汇聚至彩色偏振相机。拍摄一幅图像即可分解得到R、G、B 三个波长的彩色移相干涉条纹。通过四步移相算法对R、G、B 三个波长的瞬态波前分布进行相位提取,根据多波长干涉技术校正条纹级次,可以得到每个像素点上参考光和检测光的准确光程差,实现待测表面的高精度瞬态轮廓测量。
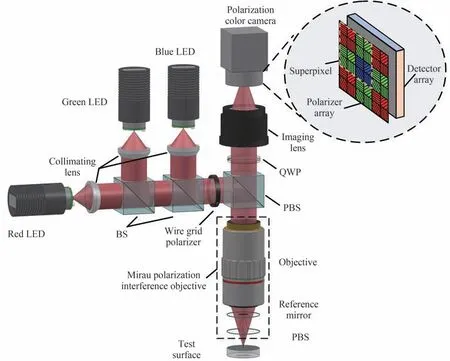
图1 基于多波长干涉的瞬态轮廓检测Mirau显微镜系统光路Fig.1 Optical path of multi-wavelength polarization Mirau interference microscope for micro profile transient measurement
1.2 测量原理
光线在系统光路中传播时的偏振态可以通过琼斯矩阵来表示并推导偏振成像的基本原理,由图1 系统布局可知,检测光Et和参考光Er在成像透镜处的偏振态为
式中,EP、EM、ET、EQWP分别为线偏振光、被测样本、参考镜和四分之一波片的琼斯矩阵,EPBS,s、EPBS,p分别为经偏振分光板后反射光s 和透射光p 的琼斯矩阵。
偏振相机的线偏振器Aj含有0°、45°、90°和135°四个偏振方向,经过偏振面阵后的检测光Et,j和参考光Er,j可表示为
根据光波叠加原理,检测光Et,j和参考光Er,j的合成矢量为E=Et,j+Er,j。偏振相机的线偏振器Aj中四个通道接收到的光强分别为Ij=|Et,j|2+|Er,j|2,j=1,2,3,4,利用四步移相算法得到待测波前的相位差分布Δφ为
多波长干涉测量选取的三个波长为λR、λG、λB(设λR>λG>λB),远波长等效波长ΛRB和近波长等效波长ΛGB分别表示为
由多波长干涉测量得到的待测波前相位差分布Δφ和等效波长Λeq,可得每个像素点上参考光和检测光的光程差OPD,从而得到待测物的面形。
2 误差分析
基于多波长干涉技术的微观轮廓瞬态测量系统解决了单波长测量小于四分之一个波长的问题,可系统误差和噪声对于检测精度的影响也随之增加,即存在误差放大效应。除此之外,偏振相机存在的瞬时视场误差、固定模式噪声、微偏振器消光比不均匀、光子响应不均匀、微偏振方向失调等也会影响测量系统的测量精度。本系统中的彩色偏振相机在传统像元面阵的基础上增加了拜耳彩色滤波阵列和偏振面阵列,其中偏振面阵列由多个4×4 的超像素单元组成,形成了RGB 在0°、45°、90°和135°四个透光轴方向的4×4 的超像素单元,使得微偏振方向失调和微偏振器消光比不均匀性影响可以忽略。
2.1 多波长误差放大效应
多波长移相干涉测量利用多个波长的光对被测元件表面进行测量,通过比对不同波长的测量结果可校正条纹级次差异。将三种不同波长的测量结果进行两两对比,可以弥补单波长测量存在的2π 模糊问题并减少由于等效波长增大而放大的误差。测得的远波长ΛRB和近波长ΛGB的相位差分布表示为
根据图2所示的流程校正条纹级次以消除相位误差,先用ΛGB的相位差校正ΛRB的相位差结果,再由ΛRB的相位差来校正单波长得到的相位差结果,从而得到被测表面的光程差分布。

图2 多波长校正条纹级次流程Fig.2 Multi wavelength correction fringe order process
利用单波长干涉和多波长干涉对金刚石车削平面镜进行测量,并对多波长干涉测量进行条纹级次校正,将单波长和多波长的测量结果进行比较可实现PV 值差值小于10 nm。这种利用不同波长测量结果互相校正条纹级次的方法,可实现误差补偿,达到高精度大动态范围的多波长移相干涉测量。
2.2 偏振相机
本系统基于偏振相机实现瞬态检测。偏振相机拍摄一次即可得到四幅相移量为π/2 的移相干涉条纹图,为瞬态检测提供基础数据。处理偏振相机数据处理时,通常认为位于同一超像素单元(4 pixel×4 pixel)的干涉条纹的相位值近似相等,然而,由于偏振相机微偏振阵列和拜耳彩色滤波阵列的不完善,每个像元对不同方向的入射光具有不同的灵敏度,使得同一超像素单元的相位值也不相同,所以传统的近似处理会对移相干涉条纹图的相位求解造成误差,因此根据式(3)对偏振相机的瞬时视场误差进行校正。本文通过对相邻像元样条插值校正来减小视场误差,提高瞬态检测的准确性和可靠性。以图3所示6×6相邻重构像元的三次样条插值方法为例,各个通道的强度Ij(j=1,2,3,4)表示为
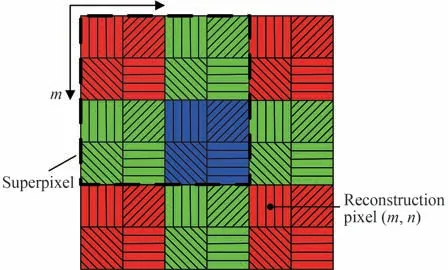
图3 彩色偏振相机重构像元示意Fig.3 Schematic pixel layout of color polarization camera
式中,t1,t2分别为临近点与插值点的权重,0≤t1≤1,0≤t2≤1。
通过式(7)计算R、G、B 各通道不同波前倾角下的相位误差,经过三次样条插值校正后的彩色偏振相机各通道对应0.10λ/pixel 的局部波前倾角的相位误差PV 值由0.105 6λ降至0.019 8λ。结果表明,三次样条插值方法可有效实现瞬时视场误差校正,保证了偏振相机的移相准确性;使用校正矩阵完成相机的参数标定,可有效消除彩色偏振相机颜色串扰以及固定模式噪声(Fixed Pattern Noise,FPN)、光子响应不均匀(Photo Response Non-uniformity,PRNU)等误差问题,为系统实现精确的微观轮廓检测奠定实验基础。
3 实验及结果分析
根据图1 搭建的多波长Mirau 偏振干涉显微镜实验系统结构如图4。实验系统中多波长LED 光源、准直透镜、分光棱镜、偏振分光棱镜、线偏振片、偏振干涉显微物镜、四分之一波片、成像透镜以及偏振相机保持同轴装夹,待测样本安装在调整架上,可以实现纵向的平移以及倾斜调节。其中LED 光源位于准直透镜的后焦距处,使出射光束为平行光束,偏振相机位于成像透镜的焦距处,使得条纹可以清晰成像。系统中R、G、B 三个单色光的LED 光源工作波长分别为624、518、447 nm,其多波长等效波长为46.94 μm。彩色偏振相机单个像元尺寸为3.45 μm×3.45 μm,四通道偏振角度依次为0°、45°、90°和135°,有效像素数为2 448×2 048,帧频为22 帧/s。
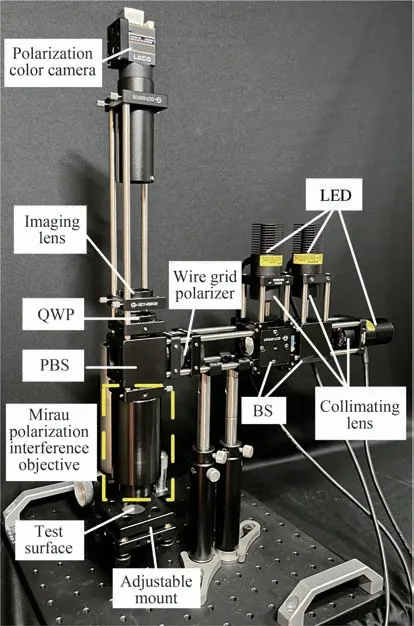
图4 实物装置样机Fig.4 Schematic of device prototype
当多波长Mirau 偏振干涉显微镜实验系统搭建完成并设定好检测光路后,利用所搭建的实验系统对标定过的纳米台阶测量,获得系统误差并进行误差补偿。然后测量标称值为1.993 9 μm 的微米台阶,测量结果与标称值的偏差约为5.4 nm,如图5所示,台阶测得的平均高度为1 988.5 nm,表明多波长Mirau 干涉显微镜可实现高精度测量。
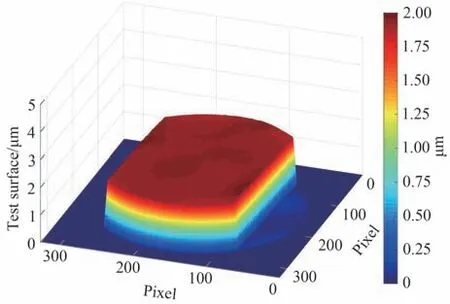
图5 标准台阶测量结果Fig.5 Measurement result of standard step
利用所搭建的实验装置对金刚石车削凸面反射镜表面进行检测。实验中通过调整架将待测样本缓慢靠近偏振干涉显微物镜,直至出现条纹,通过倾斜旋钮可以调节条纹粗细,选择合适的条纹数量,将条纹调节至清晰时,偏振相机拍摄干涉条纹图。图6 为偏振相机同时拍摄到的待测样本表面R、G、B 三个通道的相移干涉条纹图,再通过四步移相算法和多波长干涉技术得到每个像素点上参考光和检测光的光程差。
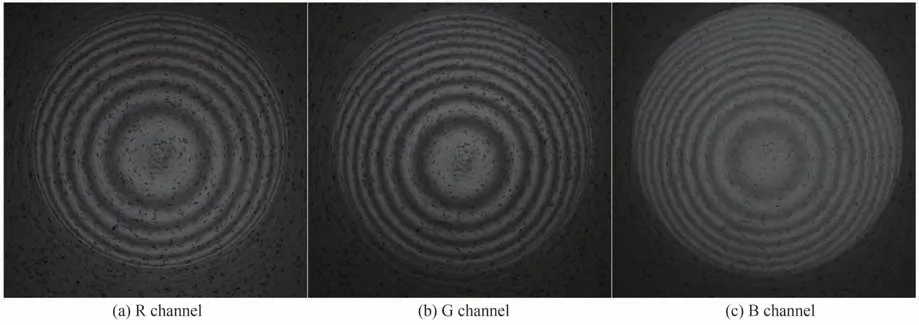
图6 R、G、B 三通道相移干涉条纹图Fig.6 Phase shift interferometric fringe patterns of R,G and B channels
将多波长Mirau 显微镜和Wyko NT9100 干涉仪对其表面微观轮廓的检测进行比较,Wyko 轮廓仪的垂直分辨率<0.1 nm。Wyko 干涉仪的检测结果如图7(a),测量区域为800 μm×800 μm 时,检测结果显示金刚石车削凸面反射镜表面微观轮廓的PV 值为1.687 2 μm,RMS 值为0.453 1 μm。
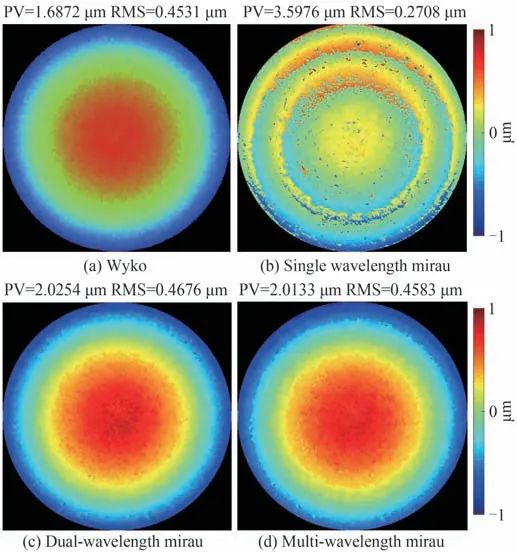
图7 微观轮廓测量结果Fig.7 Microcosmic profile measurement results
微观轮廓瞬态测量方法和Wyko NT9100 干涉仪对金刚石车削凸面镜的检测结果如图7,实验结果汇总如表1。其中图7(b)为Mirau 单波长(R)系统测量的结果,其PV 值为3.597 6 μm,RMS 值为0.270 8 μm。由于单波长干涉测量时要求连续采样点的相位差小于π,否则无法获得真实相位,图像中出现轮廓突变,该检测结果与Wyko 干涉仪检测结果相比,其PV 值、RMS 值和面形轮廓都存在较大偏差,尤其是PV 值偏差显著。

表1 金刚石车削凸面反射镜微观轮廓检测结果对比Table 1 The microcosmic profile measurement results of diamond turning convex mirrors
因此,通过多波长干涉技术利用不同波长的测量结果之间的差异级次进行校正,对金刚石车削凸面反射镜的检测结果如图7(c)和图7(d)。其中图7(c)为Mirau 双波长(R+G)系统测量的结果,其PV 值为2.025 4 μm,RMS 值为0.467 6 μm;图7(d)为Mirau 三波长系统测量的结果,其PV 值为2.013 3 μm,RMS 值为0.458 3 μm。经多波长干涉技术校正后的检测结果与Wyko 干涉仪的检测结果的表面微观轮廓分布十分接近,且数值上具有良好的一致性,表明本微观轮廓瞬态测量系统具有实际可行性。
利用多波长Mirau 偏振干涉显微镜测量金刚石车削凸面反射镜的表面粗糙度,如图8所示,测量区域为800 μm×800 μm,将多波长Mirau 和Wyko 干涉仪的测量结果汇总至表2。Wyko 干涉仪和多波长Mirau 偏振干涉显微镜测得的表面粗糙度的PV 值、RMS 值和算术平均粗糙度(Ra)值分别为302.9 nm、21.0 nm、15.2 nm 和938.5 nm、24.7 nm、14.8 nm。图8(c)和图8(d)为wyko 干涉仪和多波长Mirau 干涉仪在x与y两个方向上的线轮廓比对结果,可知两种测量系统测得的轮廓曲线高度吻合,验证了所提出的测量系统可实现高精度的大动态范围测量。

表2 金刚石车削凸面反射镜表面粗糙度检测结果Table 2 The surface roughness measurement results of diamond turning convex mirrors
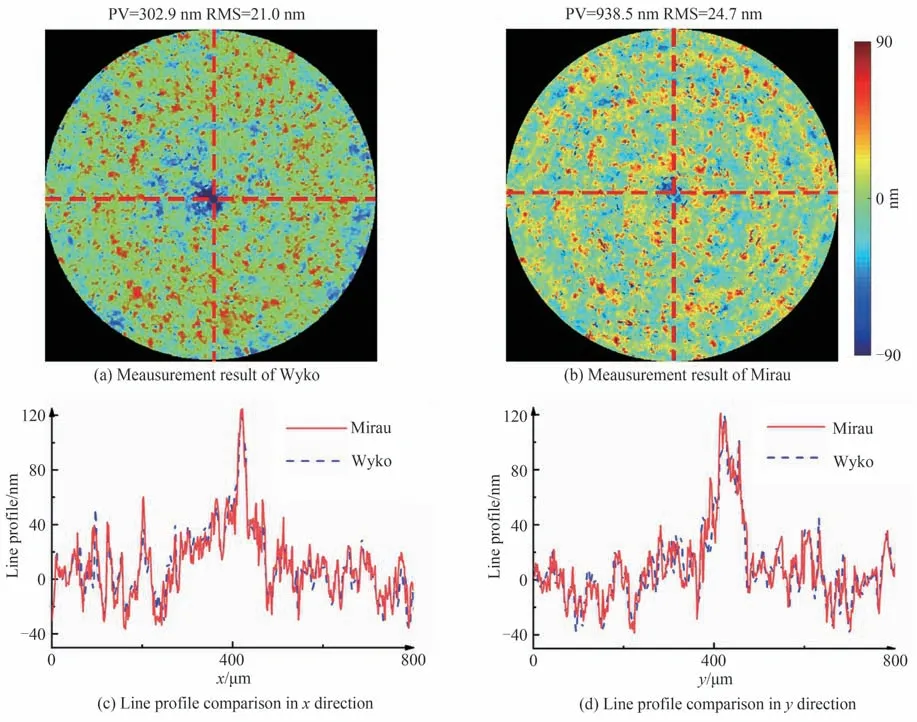
图8 表面粗糙度测量结果Fig.8 Surface roughness measurement results
4 结论
针对单波长干涉显微镜存在的测量动态范围小和2π 模糊等问题,提出了多波长Mirau 偏振干涉显微镜,以实现微观轮廓的大动态范围测量的和表面粗糙度等显微结构的瞬态检测。利用偏振相机瞬时获取四幅偏振相移干涉图,可有效降低传统PZT 移相采样时间间隔长、易受外界环境扰动的影响。对于多波长干涉会产生的误差放大效应和偏振相机的瞬态视场误差,对其影响进行分析,并给出了相应的校正方法。利用多波长Mirau 干涉显微镜对微米台阶进行了测量,证明其可实现高精度的表面测量。将该系统对金刚石车削凸面镜表面微观轮廓的单波长和多波长测量结果与Wyko NT9100 干涉仪的测量结果进行对比,经多波长干涉技术校正后的检测结果与Wyko 干涉仪的检测结果的表面微观轮廓分布十分接近,表明本微观轮廓瞬态测量系统具有实际可行性。对金刚石车削凸面镜表面粗糙度的测量结果进行对比,结果表明基于多波长干涉技术的微观轮廓瞬态测量方法相对于Wyko 干涉仪测量结果的均方根值偏差为3.7 nm,两种测量系统测得的轮廓曲线高度吻合,验证该系统可实现高精度的大动态范围测量。