大视场白光干涉测量系统及性能研究
2024-01-29刘涛王智彬胡佳琪何耀楠景炜昌陈恩静周文龙于国明杨宁赵迪张国锋杨树明
刘涛,王智彬,胡佳琪,何耀楠,景炜昌,陈恩静,周文龙,于国明,杨宁,赵迪,张国锋,杨树明
(1 西安交通大学 机械工程学院,西安 710049)
(2 西安恩科微纳光电科技有限公司,西安 710077)
(3 麦克奥迪实业集团有限公司,厦门 361006)
(4 陕西省计量科学研究院 国家市场监管重点实验室(计量光学及应用),西安 710100)
0 引言
普通激光干涉仪是单色激光照明,轴向干涉条纹随测量臂和参考臂之间光程差的改变呈现等幅余弦规律变化,这是造成普通干涉测量无法适用于表面高度半波长跳变检测(即2π 相位不确定性问题)的根本原因[1-2]。共焦干涉显微技术由于引入了共焦针孔的层析作用从而使得余弦干涉条纹被调制,结果轴向干涉响应是幅度衰减的振荡变化,因此干涉共焦显微技术可以克服2π 相位不确定性问题[2],然而干涉共焦依赖三维点扫描制约了其实际应用。另一类基于干涉原理的宽场层析显微测量技术为低相干性干涉显微技术,采用了低相干宽带光源照明。目前最典型的测量手段主要是白光干涉技术(White Light Interferometry,WLI)(1986年由美国KLA 公司的Davidson 申请了专利[3]),WLI 属于光学面层析显微技术,主要应用于表面形貌、粗糙度、膜层形态等的非接触精密测量[4-9]。2015年,美国Zygo 公司的Groot 全面总结了干涉显微技术和白光干涉测量技术的基本原理、进展、应用和标准化问题[10]。白光干涉测量技术是纳米及亚纳米光学精密检测的重要方法,其垂直分辨率与原子力显微镜相当,在超精密加工制造,如半导体晶圆生产质量控制中,发挥着一般3D 检测仪器难以替代的作用[11-12]。
国内在白光干涉测量的理论研究和仪器化方面均晚于国外,近年来通过开展大量研究,也取得了显著进展[13-25],包括理论算法、干涉镜头、系统装置、超分辨和应用等几个方面。在理论算法方面,北京理工大学系统研究了光纤白光干涉测量算法[13],天津大学研究比较了空间域和频率域相干峰值提取算法[14],华中科技大学提出了基于干涉信号包络匹配和相位判别的表面形貌恢复算法[15],广东工业大学研究了基于复合相移的高精度三维重建新算法和基于内群特征点对的多视场三维形貌快速配准方法[16],大连理工大学研究了白光干涉测量蝠翼效应修正算法以及高频形貌误差补偿算法[17]。在干涉镜头研制方面,上海理工大学仿真设计了放大倍数为50 的Mirau 型干涉显微物镜参数[18],南京理工大学设计并研制了一款放大倍数仅为0.5的大视场白光干涉物镜[19],中国电子科技集团公司第十一研究所理论设计了20 倍Mirau 型白光干涉显微物镜[20]。天津大学[21-22]、华中科技大学[23-24]、哈尔滨工业大学[25-26]、大连理工大学[27]、南京理工大学[28]、西安交通大学[29]等在系统装置研制及应用方面进行了深入研究。在横向分辨率提升方面,中科院沈阳自动化研究所提出了近场辅助的高分辨白光干涉显微技术[29],山东大学基于深度学习重构出了超分辨白光干涉图[30-31]。
本文基于国产化的2 倍大视场迈克尔逊型白光干涉物镜,优选配置0.5 倍适配镜,构建了白光干涉成像系统。针对照明光源,进行了滤波参数的理论估计和实验测试,获得了良好的白光干涉轴向响应曲线,为白光干涉三维精密测量提供了基础条件;通过白光干涉轴向响应实验曲线确定中心波长,为精密相移补偿提供了基本参数;研制了大视场白光干涉测量系统,并编写了专用软件系统;进行了系统畸变、分辨率和精度等的测试比较。实测了标准台阶、粗糙度样板等典型样品,验证了所构建的白光干涉测量系统具有大视场、高测量精度的特性,可实际应用于三维表面形貌、微纳米缺陷、粗糙度、薄膜厚度等的光学精密检测。
1 大视场白光干涉光路系统
所设计的大视场白光干涉测量系统光路结构如图1,包括国产化的2 倍迈克尔逊型干涉物镜镜组、0.5 倍适配镜组、焦距为200 mm 的管镜镜组,等。迈克尔逊型干涉物镜镜组采用了不同折射率和阿贝常数的折射球面透镜的组合。0.5 倍适配镜的优选配置目的是在固定探测像面条件下,有效增大物方线视场,实现单镜头下更大视场的三维光学层析测量。图像探测器选用了彩色CCD。

图1 大视场白光干涉系统光路结构示意Fig.1 Schematic of the optical path of large field-of-view WLI system
系统中,干涉物镜设计横向放大倍数Mo=2,适配镜横向放大倍数Ma=0.5,彩色CCD 有效探测靶面像素数2 592×2 048,像元尺寸为4.8 μm,探测靶面实际尺寸为12.442 mm×9.830 mm,对角线长度y′max=15.857 mm,可得理论物方最大视场为
2 照明光源带通滤波及干涉响应
白光LED 体积小、寿命长、成本低,适合作为白光干涉测量系统中低相干宽带白光光源。图2 为所选白光LED 的实测光谱分布,真实的光谱分布曲线一般要通过严格校准的光谱仪才可准确测得。白光LED 光源的光谱分布基本特点是在可见光光谱范围内存在两个波峰段,特别是500 nm 以下存在一个显著的单峰波段。固有的双峰光谱特性会对相应的白光干涉响应信号造成不利影响,一方面导致相移法峰值位置补偿时中心波长难以确定,另一方面轴向干涉响应会发生次级振荡干扰,影响白光干涉薄膜测厚。因此,有必要通过合理选择带通滤波参数来改善白光干涉轴向响应分布。
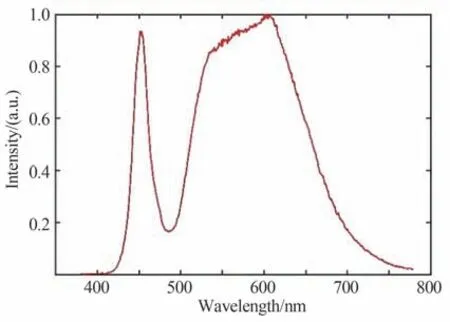
图2 白光LED 光源的光谱实测曲线Fig.2 Measured spectral curve for the white LED source
白光LED 光源的光谱分布可以使用洛伦兹模型进行模拟,该模型在一定程度上可改善各种环境因素如干涉物镜的数值孔径、参考光和测量光的相位偏差等的影响[18,19],一般采用经验公式来仿真白光LED 光源的轴向干涉光强信号分布,表示为[20]
式中,C为常数;α为物镜最大会聚半角,由干涉物镜的数值孔径NA 决定(NA=nsinα,n为干涉物镜所处介质的折射率);k为波数,k=2π/λ,λ为波长;z为轴向(或高度)位置坐标;z0为测量点位置;ϕ为相位偏移;S(k)为光源光谱强度分布曲线。
将实际测量得到的LED 光源光谱曲线(如图2)代入式(2),并取n=1,NA=0.4,得到如图3(a)所示的白光干涉轴向强度响应曲线,可见,使用未经滤波的白光LED 光源将在两侧出现非振荡衰减分布及明显的拖尾,同时有效干涉信号的宽度较窄。接着,将图2所示光源光谱中的主峰(约500 nm 以上)代入式(2),重新计算得到了较为理想的白光干涉信号分布(如图3(b))。仿真结果表明:经过谱峰分离后的白光LED 光源,其双峰特性对干涉信号的不利影响得到了有效抑制。
在仿真计算的基础上,通过实验验证经过光谱滤波后白光干涉响应的实际效果。图4 为所用白光LED光源对应的原始白光干涉实际分布(随机位置采集),从图中可以看出,白光干涉信号不对称,重心发生偏移,这主要是由光源的双峰特性引起,同时受到光路系统、干涉物镜结构、环境噪声等多种因素的共同影响。

图4 某一位置对应的白光LED 光源实际原始干涉信号Fig.4 Actual raw interference signal for the white LED source at a certain position
通过定制不同宽度的带通滤光片来实现光谱滤波,带通滤光片的基本参数如表1,实验得到的白光干涉信号分布如图5(a)~(d)。从图中可以看出,随着滤光片带宽的增加,白光干涉响应曲线变得对称,干涉信号总长度变窄,零级条纹清晰可见。实验结果表明,通过分离LED 光谱的主峰可获得较为理想的白光干涉信号分布,通过合理滤波可以消除由光谱双峰特性造成的固有缺陷,信号主体分布接近对称,干涉信号长度适中。本文采用表1 中第四组带宽为240 nm 的带通滤波片对白光LED 光源进行有效滤波,便于更准确地提取白光干涉零光程差峰值位置,提高测量精度。第四组参数对应的空间相干长度估算为1.5 μm。

表1 定制的带通滤波片基本参数Table 1 Basic parameters of the customized bandpass filters
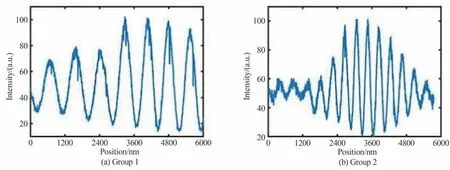
图5 在不同滤光片条件下产生的实际白光干涉信号Fig.5 Actual white light interference signal with different spectral filters
通过随机选择的位置点,提取实测的白光干涉响应信号并进行比较,尽管与理论分布有差异,但仍可以充分说明光谱滤波对白光干涉响应信号的直接影响,从而为高精度白光干涉测量系统中照明光源的选择提供设计依据。
3 系统装置及性能测试
3.1 系统装置
研制的大视场白光干涉测量装置实物如图6(未包括控制系统和计算机),该装置分为测头和底座两部分。底座是三维组合精密位移台,包括自制的样品倾斜调整机构,Z 向扫描利用纳米位移台(闭环和开环最大行程分别为250 μm 和350 μm,闭环和开环分辨率分别为1 nm 和0.5 nm,线性度误差为0.02%,双向重复性为±1 nm)实现,通过纳米位移台等间隔轴向步进扫描并利用CCD 采集干涉图像。X、Y方向运动由二维精密位移台实现,该装置的实际三维最大检测能力为(XYZ)90 mm×90 mm×350 μm。根据图5所示实验测试结果,在照明光路中加入第4 组带通滤光片(表1),以获得较为理想的白光干涉信号。利用C++编写了整套白光干涉测量软件系统。

图6 大视场白光干涉测量系统装置Fig.6 Apparatus of large field-of-view white light interferometer
3.2 畸变、视场和放大倍数测试
利用二维网格板和分辨率板分别对光学系统畸变、物方最大视场及横向放大倍数等进行实验测试。图7 为系统采集的二维网格板,网格板实际大小为10 mm×10 mm,对角线长度为14.14 mm。按照显微镜最大视场的对角线评价方法,物方最大视场达到了14 mm。物方视场的大小取决于适配镜的倍数,通常可以选1 倍、0.65 倍、0.5 倍等参数。

图7 物方视场Fig.7 Field-of-view at the object side
以中心(图7 中红点所示)为原点,以45°方向每一个十字交叉点计算一次横向放大倍数,各位置的计算结果如表2。表2 中各点位置从中心开始算起,方向1 至4 分别是从中心点开始沿四个对角线的方向。最终得到光学成像系统的有效横向放大倍数为M=0.94(表1 中数据的平均值),计算得到像场边缘的相对畸变为1%(将均值M作为参考值)。

表2 有效横向放大倍数测试Table 2 Test of the effective lateral magnification
利用分辨率板(大恒光电,型号:GC020101)对系统的分辨率进行测试,对分辨率分别为80,100,120 lp/mm 的线对成像,结果如图8,提取中心线得到三种线对的对比度V分别为12%、7%、5%。根据5%的对比度结果,系统成像时的水平分辨率达到了120 lp/mm(周期为8.33 μm)。
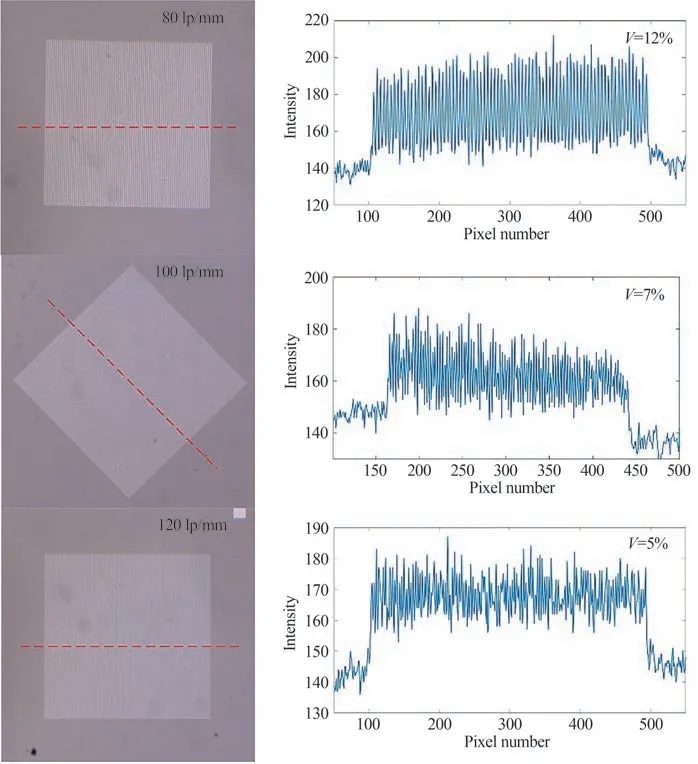
图8 水平分辨率测试Fig.8 Test of the lateral resolution
3.3 实际中心波长确定
实际的白光LED 光谱分布并不是对称的,与高斯分布也存在较大差异,而中心波长参数又直接影响峰值位置的相移补偿结果,也直接影响测量结果。本文根据一系列位置点随机选择的、实测的白光干涉轴向响应曲线,通过数个级次条纹的拟合计算,取均值后得到同一个干涉物镜条件下的中心波长参数。研究发现,中心波长的计算与不同样品、不同位置、拟合方法、条纹选取级次数量等都有关系,因此根据若干组数据取均值,最终确定的中心波长为λc=574 nm。
3.4 标准台阶测试
为了验证系统的测量准确度和精度,选用标定过的高度分别为2.04 μm(台阶1)和20.43 μm(台阶2)的标准台阶样品(日本TOKYO SEMITSU,型号:E-MC-S57A),实物照片如图9,针对该样品开展实验测试。使用重心法结合相移法提取零光程差峰值位置,得到三维形貌分布,对三维形貌数据进行滤波和倾斜校正,结果如图10 和11。针对台阶1,同时给出了原子力显微镜(Atomic Force Microscopy,AFM)测试结果,如图10(e)和10(f),AFM 测量结果为2.04 μm。

图9 标准台阶实物照片Fig.9 Photo of the standard step sample

图10 标准台阶1 的测量结果Fig.10 Measurement result of the standard step 1
图10(a)为实验装置采集过程中的一幅原始干涉信号图,图10(b)是经过了滤波和倾斜校正的三维形貌测量结果,图10(c)和10(d)分别是俯视图和对应红色虚线的线轮廓图,根据图10(d)计算得到台阶高度。图11 为针对台阶2 的测量结果。

图11 标准台阶2 的测量结果Fig.11 Measurement result of the standard step 2
如图10(d)和11(d),台阶上下表面高度值相减得到台阶高度,进行10 次重复测量,结果如表3。台阶1和台阶2 的10 次测量的平均值分别为2.05 μm 和20.47 μm,极差分别为0.03 μm(台阶1)和0.05 μm(台阶2)。以标定值作为真值(参考值),绝对误差分别为0.01 μm(台阶1)和0.04 μm(台阶2),相对误差分别为0.5 %(台阶1)和0.2 %(台阶2),测量重复精度(标准差)分别为12 nm(台阶1)和16 nm(台阶2),验证了所研制测量系统具有高准确度和高精度的特性。

表3 标准台阶的10 次重复测量结果(单位:μm)Table 3 Ten repeated measurement results of the standard step sample(unit:μm)
4 典型样品的实际测量
4.1 粗糙度样板
对粗糙度刻线样块进行表面检测,样块的粗糙度标称值为Ra=0.191,取刻线板中间一条线进行估算,如图12,粗糙度测量结果为Ra=0.193,单位为微米(μm)。图12(a)为实测干涉图,刻线板的三维表形貌如图12(b),二维俯视图和一维线轮廓图(对应红色虚线)分别如图12(c)和(d)。
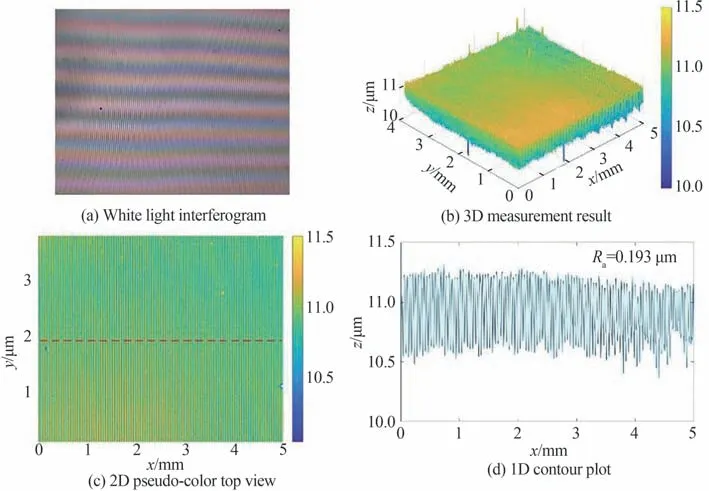
图12 刻线板测试Fig.12 Test of the reticle
4.2 微机电系统结构
选取一块微机电系统(Micro-electromechanical System,MEMS)单元结构,图13(a)为白光干涉图,选取黑色虚线框目标区域进行形貌提取,结果如图13(b)。经提取数据分析,各点的高度在70~100 nm 之间,进一步使用原子力显微镜表征该区域结构,结果表明,局部单元结构的实际高度约为80 nm 左右。由于大视场白光干涉测量系统的水平分辨率较低,因此MEMS 单元结构的三维真实形貌细节未能清晰展示,可采用10 倍或20 倍干涉物镜进行精确测量。
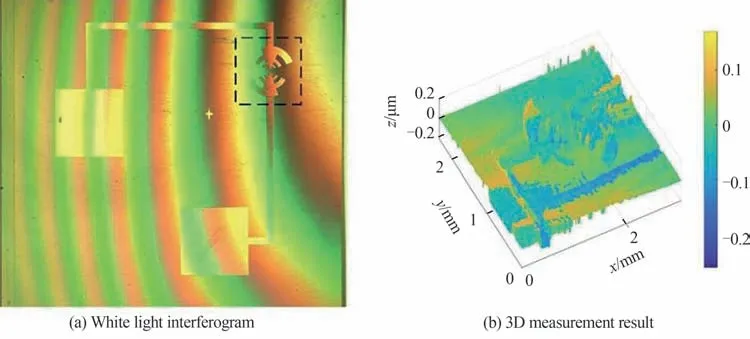
图13 MEMS 结构测试Fig.13 Test of the MEMS structure
4.3 晶圆膜层
利用研制的白光干涉精密测量系统对薄膜进行整个表面形态和厚度的精密测量。选取一半导体Si 晶圆,Si 晶圆表面上有厚度为1 μm 的SiO2薄膜层(折射率取1.45)。图14(a)为整个视场下的白光干涉图,标记圈内选取一方形区域提取三维膜层结果,如图14(b),膜层上下表面的形态分布清晰可见。进一步选取一小区域将各位置点的薄厚数据列入表4,这些膜厚数据的平均值为1.03 μm。

表4 靠近中间区域各位置点的薄厚数据(单位:μm)Table 4 Film thickness measurement results of the central fraction(unit:μm)

图14 Si 晶圆表面SiO2膜层的测试Fig.14 Test of the SiO2 film on a Si wafer
利用所研制的装置对粗糙度刻线板、MEMS 结构、半导体晶圆分别进行了实测,包括三维形貌和膜层形态,展示了白光干涉测量技术在微纳测量方面的重要用途。
5 结论
基于国产化的2 倍白光干涉镜组和0.5 倍适配镜构建了白光干涉光路系统,通过白光干涉光源滤波的理论计算和实验测试确定了带通滤波参数,根据实测白光干涉响应曲线确定了中心波长参数,设计了大视场白光干涉测量装置,并编写了软件系统。对系统的放大倍数标定、畸变和分辨率等进行了实验测试。实验结果表明:系统物方视最大场达到了14 mm;通过对标准台阶的实际测量,验证了测量结果具有高准确度和高精度。对典型样品的实测展示了白光干涉测量技术在微纳结构表面形貌和薄层厚度形态分析等领域的应用前景。
致谢感谢西安工业大学光电工程学院刘丙才副教授为实验提供测试样品。