垂直起降无人机涵道螺旋桨地面效应研究
2024-01-13陈伟政
周 煜 ,陈伟政
(1.中国船舶科学研究中心,江苏 无锡,214082;2.深海技术科学太湖实验室,江苏 无锡,214082)
0 引言
近年来,无人机在各种军事和民用领域中得到广泛使用。传统的四旋翼无人机虽具有良好的操纵性,但大都续航性能较差,不能执行大范围任务。传统固定翼无人机虽然在执行大范围任务时效率较高,但由于起飞要求高,机动性差,小范围精准作业难度较大。涵道风扇型无人机作为一种新型无人机,具有垂直起降功能,机动性能独特、推进效率高、噪声低且具有较好的隐蔽性[1-2]。美国Sikorsky 公司研制的Cypher 型无人机(见图1)可以执行前缘侦察、边界巡逻、通信中继、远程核生化检测和关键物品的后勤支援等任务。联合宇航公司设计的ISTAR 型涵道风扇无人机(见图2)能执行情报、监视、侦察和辨标获取等任务。

图1 Cypher I 与Cypher II 系列无人机Fig.1 Cypher I and Cypher II series UAVs

图2 ISTAR 无人机Fig.2 ISTAR UAV
涵道风扇型无人机的推进装置为涵道螺旋桨,是一种将孤立螺旋桨放置于圆环涵道中以产生更大气动力的推进装置。最早对涵道螺旋桨展开研究的是美国国家航空航天局(National Aeronautics and Space Administration,NASA)。早 在20 世 纪60 年代,NASA 就针对涵道螺旋桨进行了一系列的风洞试验并得到了一些实验数据[3-7]。之后,Black 等[8]就涵道入口形状、涵道出口扩张角、旋翼位置和桨叶数量等因素对涵道风扇进行了深入研究,结果显示涵道出口扩张比是影响气动性能的最重要因素。
近年来,随着计算机技术的飞速发展,计算流体动力学(computational fluid dynamics,CFD)技术已经广泛应用于航空、航天、气象及船舶等领域[9]。将CFD 数值仿真应用于涵道螺旋桨的研究成果越来越多。芦志明[10]、宋文瑞[11]等研究了悬停、轴流及斜流3 种情况下涵道螺旋桨的拉力和升力变化规律;苏雷[12]对涵道螺旋桨进行了优化设计,总结了涵道出口扩张角、出口长度及桨尖-涵道间隙等参数对涵道螺旋桨性能的影响。
地面效应对飞行器起飞和着陆有着重要影响,而且地面效应对气动性能的影响呈现高度的非线性特性[13]。涵道螺旋桨广泛应用于垂直起降飞行器,在起飞和降落靠近地面时,地面效应对其气动性能的影响同样不可忽视。目前对开放式旋翼在近地悬停时地面效应的研究已较为成熟[14],但关于涵道式螺旋桨地面效应的研究还比较匮乏。Lee 等[15]使用格子莫尔兹曼方法对比了开发的螺旋桨和涵道螺旋桨,认为涵道有减弱地面效应的作用。Jardin 等[16]通过实验和数值仿真研究了涵道螺旋桨在靠近地面、墙壁及天花板时气动性能的变化,发现靠近地面时产生的湍流涡流和脉动速度会影响涵道螺旋桨的稳定性。Bai[17]用CFD方法研究了涵道螺旋桨在靠近地面、静水和波浪时产生的不同效应,发现虽然近水时对涵道螺旋桨的影响不如地面强,但升力和扭矩的变化趋势几乎一样。邓阳平等[18]研究发现涵道螺旋桨的升力和功率随着桨距角的增大而增大。但上述研究更多是定性研究,关于不同离地高度的影响工况研究较少。文中以使用多种不同垂直起降无人机的涵道螺旋桨为研究对象,通过数值仿真方法详细研究了地面效应对涵道螺旋桨的影响,得到了地面效应对涵道螺旋桨气动特性影响的初步结论。
1 计算模型
文中使用的涵道螺旋桨气动模型如图3 所示。3 种计算模型除了桨叶数外,其余部分的结构均相同,涵道皆由NACA 0018 翼型旋转1 周生成,使用的螺旋桨为T-motor G27*8.8 型。因为桨毂的存在对气动性能影响较小,为了简化模型删除了桨毂。模型的主要参数见表1。涵道螺旋桨的气动性能主要由2 个参数决定: 一是影响气流扩散作用的指标面积比,即涵道出口面积SD与桨盘面积Sd的比值 σd=SD/Sd,面积比一般取1.0~1.25 之间,文中取1.05;二是展弦比,涵道展弦比是指桨盘处涵道内径D=d+2δ(d为桨叶直径,δ为桨壁间隙)与涵道高度c的比值。研究表明,当展弦比为1.5 时,涵道所提供的拉力最大。文中取涵道的展弦比为 1.52 。

表1 涵道螺旋桨主要参数Table 1 Main parameters of ducted fan

图3 涵道螺旋桨模型示意图Fig.3 Ducted fans model
2 数值仿真与验证
利用数值仿真的方法,通过求解流动控制方程来模拟流场的流动情况,避免了具体的模型实验,既降低了实验成本,还可观察流场的具体流动情况并作出实时分析。处理多体相对运动问题一般需要使用动网格模型,常用的动网格技术包括结构网格超限插值技术、非结构动态网格重构技术、重叠网格技术以及滑移网格技术。文中使用基于多重坐标参考系(multiple reference frame,MRF) 的滑移网格方法对涵道螺旋桨进行研究。
涵道和桨叶之间存在严重的气动干扰,呈现出高度的非定常特性。文中使用的MRF 方法是在螺旋桨周围建立1 个封闭的圆柱体区域用来仿真螺旋桨的旋转(如图4 所示),这个区域称为旋转域。其他部件所处的区域称为静止域。旋转域有与螺旋桨相匹配的旋转坐标系,静止域指相对静止不变的坐标系。这样将瞬态问题近似看成稳态问题,在两坐标系中分别求解流动控制方程,2 个区域之间流场的信息交换通过交接面将相对速度转换成绝对速度来实现。
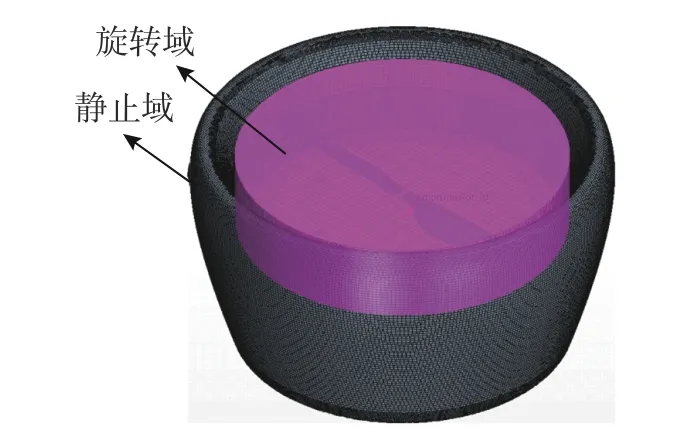
图4 MRF 方法示意图Fig.4 Schematic diagram of MRF method
数值仿真求解的过程中为了使控制方程得以封闭,计算结果接近实际情况,引入湍流量,文中选用 Realizable K-epsilon 湍流模型进行求解,该模型可更精准的仿真涵道螺旋桨的旋转情况。其湍流动能k和耗散率 ε由以下输运方程得到
式中: µt为涡黏性系数;σk、σε分别为k和 ε的湍流普朗特数,σk=1.0,σε=1.3;Gk、Gb分别为平均速度梯度湍动能生成项和浮力产生的紊流动能;G1ε、C3ε和c2ε为常数,G1ε=1.44,c2ε=1.92,C3ε=1;Sk和Sε是用户定义的源项。
湍流粘度
式中,Cµ=0.09 为常数。
采用孤立螺旋桨T-motor G27*8.8 在自由空间内的悬停实验验证文中数值仿真方法的求解精度,如图5 所示。
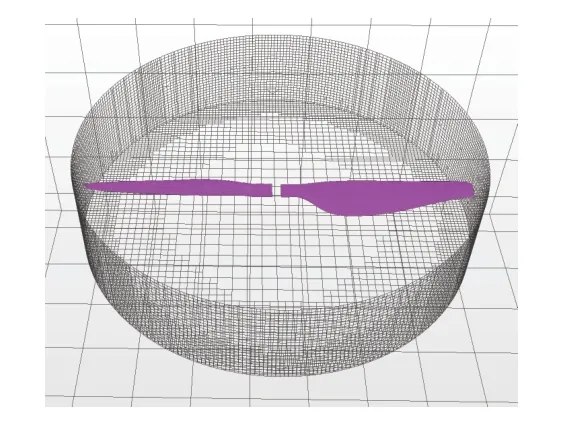
图5 孤立螺旋桨旋转域Fig.5 Isolated propeller rotation domain
使用MRF 方法,在孤立螺旋桨周围用1 个圆柱形区域将螺旋桨包裹,并将其设置为旋转域,其余空间均设置为静止域。分别计算不同转速下螺旋桨所产生的升力。将计算结果与T-motor 官网给出的参考值进行对比,结果见表2。可知,不同转速下得到升力的误差基本都小于5%,为可接受范围,故使用的计算方法具有较高可行度。

表2 不同转速下实验所得升力值与参考值对比Table 2 Comparsion of the experimental lift value and reference value at different rotational speeds
3 计算网格及求解器设置
首先进行网格无关性检验,探究网格数量对计算结果的影响。针对使用的计算模型,选取3 种不同密度的网格,采用相同的计算方法和相同的边界条件进行计算,对比不同计算网格得到的升力和反扭矩值如表3 所示。结果显示低密度网格误差相对较大,高密度网格虽然更精确但计算时间较长,文中选择中密度的网格计算。
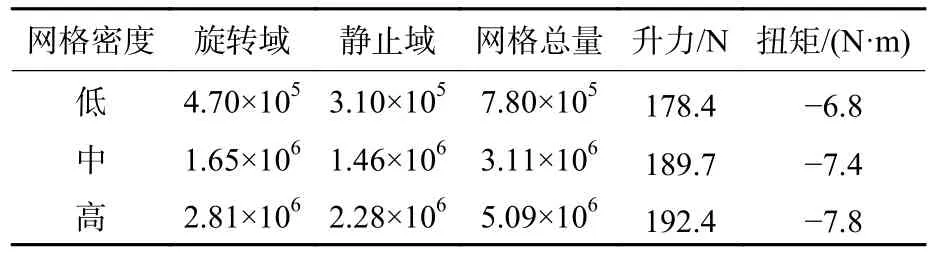
表3 3 种不同网格密度及实验结果对比Table 3 Comparison of three different mesh densities and experimental results
对涵道出入口、桨尖处对网格进行局部加密,最终形成的网格如图6 所示。理论上外流场的计算域应取无穷大,基于计算资源考虑,文中选取正方体计算域,正方体边长取20 倍涵道入口直径。改变离地高度时保持涵道螺旋桨模型气动中心与正方体中心始终位于一条轴线上。实验使用的求解器为Ansys-Fluent,边界条件设置如图7 所示。四周边界采用压力出口的边界条件,涵道螺旋桨和地面使用固定壁面的边界条件。
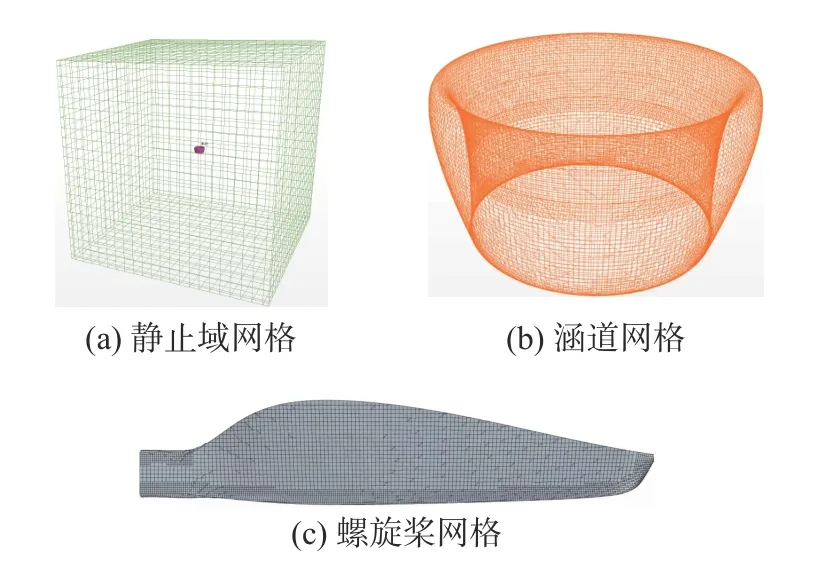
图6 计算网格Fig.6 Compute mesh
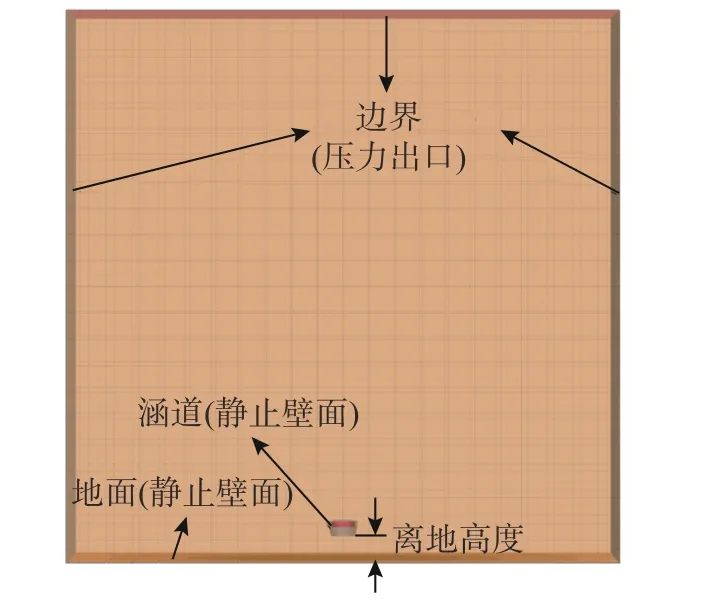
图7 边界条件设置Fig.7 Boundary condition setting
图8 为外流场网格分布情况,为了在捕捉涵道附近精密流场信息时减少全局网格量,由外至内将网格逐级加密。静止域与旋转域交界处网格如图9 所示,为使网格过渡更加平滑,在涵道尾部尖端与螺旋桨旋转域内进行局部加密。同时在生成网格时使用额外体控制保持交界面两侧网格尺度大致相同,以确保交界面间插值计算的准确性。
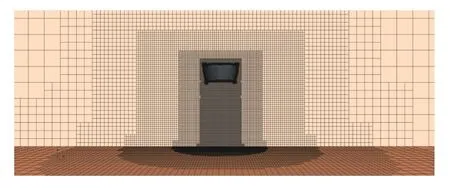
图8 外流场网格分布情况Fig.8 Grid distribution of outflow field
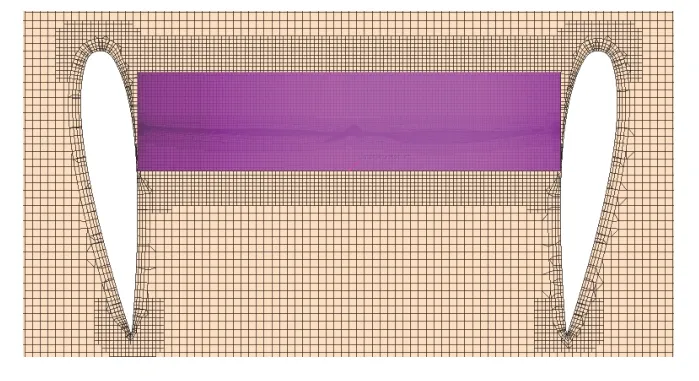
图9 静止域与旋转域交界处网格Fig.9 Grid at the junction of stationary and rotating domains
4 仿真结果分析
以涵道出口与地面的距离H与桨盘处涵道内径D的比值为指标,计算不同近地高度涵道螺旋桨的气动性能。对两叶、三叶和四叶3 种型号涵道螺旋桨分别取H/D=0.2、0.4、0.6、0.8、1.0、1.2、1.5、2.0、3.0 和4.5 等10 种工况进行计算。当H/D=4.5 时,可看做涵道螺旋桨在自由空间内悬停。螺旋桨转速取4 000 r/min,马赫数为0.42,因为所取高度不大,大气参数近似海平面,密度取ρ=1.225 kg/m3。
图10 分别显示了悬停在6 个不同离地高度的平均压力场。可以明显看出,随着涵道螺旋桨离地距离的减小,螺旋桨下方静压增加,但上方压力变化不大。所以越接近地面,螺旋桨升力也逐渐增加。另一方面从流线图可看出,当H/D≥2.0时,涵道出口的尾流还较稳定。随着高度的不断降低,尾流与撞击地面后的反射气流相互影响形成涡环[18],使得通过螺旋桨的流量有所增加,扩大了螺旋桨上下方的压力差,从而使螺旋桨的升力增加。但是因为反弹的气流被吸入涵道内部,增大了涵道螺旋桨的反扭矩,使得螺旋桨需要更多的驱动功率来克服反弹气流做功。同时,越接近地面,壁面射流的厚度逐渐下降,流速加快,涵道扩散口的有效流通面积Ae降低,导致质量流率下降。

图10 不同离地高度下涵道对称面处的流线和压力云图Fig.10 Streamlines and pressure nephograms at the surface of symmetry of culverts at different elevations
下面通过数值仿真的结果详细说明3 种涵道风扇各部件受力变化。首先,分别计算不同工况下涵道螺旋桨各部件的升力T和扭矩M。结果如图11 和图12 所示,当H/D>2时,各部件升力变化不大;当H/D<2时,随着离地高度的减少,螺旋桨升力值开始逐渐增大,涵道的升力逐渐减少。两叶桨、三叶桨和四叶桨涵道风扇螺旋桨部分升力分别提升了32.6%、46.1%和56.7%;涵道部分升力分别减少了80.2%、71.9%和70.3%。可以看出,在不同桨叶的涵道风扇系统中,地面效应对涵道部分的升力降低影响较为一致,但对于系统中螺旋桨部分的升力提升效果却各不相同。
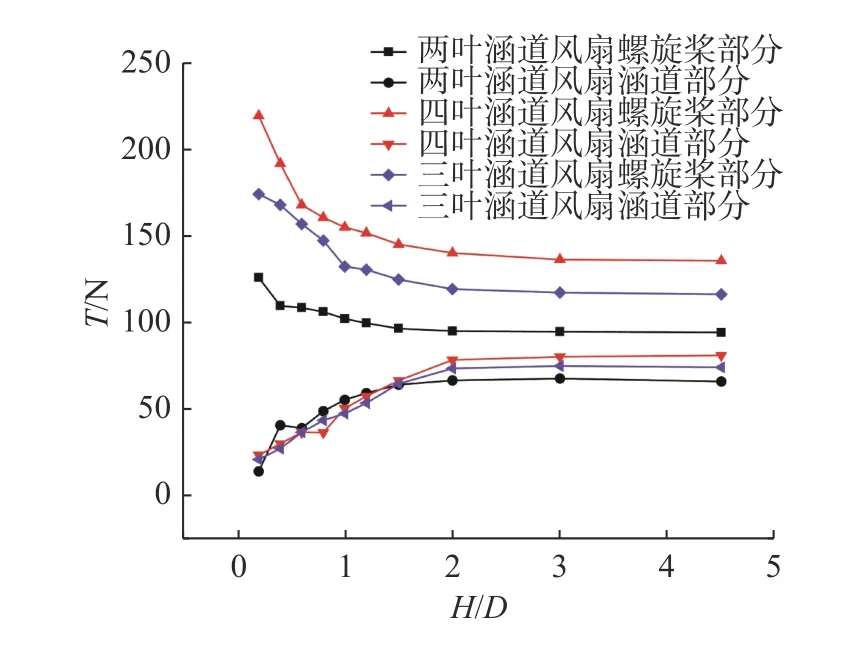
图11 各部件升力随高度变化曲线Fig.11 The lift of each component varies with height

图12 涵道螺旋桨反扭矩随高度变化曲线Fig.12 The reverse torque of the ducted fan varies with height
将涵道螺旋桨系统升力及驱动功率按下式无因次化处理为升力系数CT和功率系数CP,且
式中:T和P分别为升力和驱动功率;ρ为空气密度;n为旋转速度;D为涵道直径。
图13 为不同离地高度下,涵道螺旋桨升力系数和功率系数变化曲线。可以看出,当H/D≥2.0时,涵道风扇系统受到的总升力基本不变,3 种涵道风扇系统的升力系数都变化不大。当H/D≤2.0时,两叶涵道风扇升力系数逐渐降低,三叶涵道风扇和四叶涵道风扇升力系数先减少后增大。在H/D由2.0 降低到0.2 的过程中,两叶涵道风扇升力系数下降了13.4%,三叶涵道风扇升力系数基本不变,四叶涵道风扇升力系数提升了11.2%。
随着离地高度的减少,涵道风扇系统的功率系数逐渐增大。在H/D由2.0 降低到0.2 的过程中,两叶涵道风扇功率系数增大了9.48%,三叶涵道风扇功率系数增大了19.08%,四叶涵道风扇功率系数增大了12.78%。
计算涵道风扇品质因子随离地高度的变化。品质因子是衡量飞行器悬停效率的指标,即
可得3 种涵道风扇随离地高度减少,品质因子变化如图14 所示。可以看出,在H/D由2.0 降低到0.2 的过程中,两叶涵道风扇品质因子下降了26.4%,三叶涵道风扇的品质因子下降了14.6%,四叶涵道风扇品质因子提升了4%。
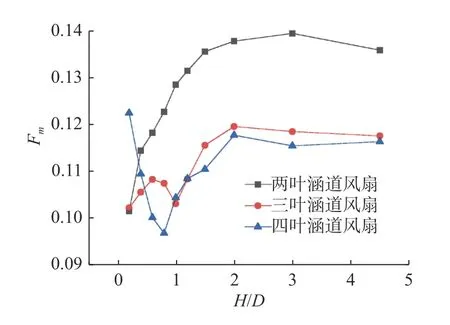
图14 不同离地高度下涵道螺旋桨品质因子变化曲线Fig.14 Changes of ducted fan quality factor at different elevations
5 结论
文中基于RANS(Reynolds averaged Navier-Stokes)方程和MRF 方法对涵道螺旋桨进行了气动特性研究,探究了不同离地高度对涵道螺旋桨气动特性的影响和流动机理,得出了以下结论。
1) 当H/D≤2 时,涵道螺旋桨的气动特性开始发生变化,并随着该值的降低变化逐渐明显。此时螺旋桨部分升力增大,涵道部分升力减小,系统整体的升力变化与螺旋桨的选取有关;同时地面效应使得涵道螺旋桨所受反扭矩增加。
2) 地面的存在改变了涵道风扇下洗流的速度和质量流率。涵道扩散口的有效流通面积降低,导致质量流率下降,严重影响了推进单元的气动稳定性。
3) 地面效应使得涵道下方产生高压区,这是螺旋桨部分升力增大的主要原因。从地面反弹的气流与尾流相遇产生的“涡环”消耗了系统的能量,使得涵道螺旋桨整体升力减小;同时因为反弹的气流被吸入涵道内部,使得螺旋桨需要更多的驱动功率来克服反弹气流做功。
4) 将地面效应对气动特性的影响量化成品质因子的变化,经过计算发现在H/D由2.0 降低到0.2 的过程中,两叶涵道风扇品质因子下降了26.4%,三叶涵道风扇的品质因子下降了14.6%,四叶涵道风扇品质因子提升了4%。
由于使用的涵道螺旋桨模型与真实的涵道螺旋桨存在差异,文中仅初步探究了地面效应对涵道螺旋桨气动特性的影响作用,后续还需要进行更多的数值仿真和试验验证对比工作,对地面效应的影响进行更深入的分析。
