基于Kane 动力学的十字舵型欠驱动AUV 建模与仿真
2024-01-13杨柯
杨 柯
(中国计量大学 机电工程学院,浙江 杭州,310018)
0 引言
随着国家海洋战略的实施,对海洋装备的需求日益增多。水下机器人作为海洋观测和采样的重要工具,得到了蓬勃发展。自主水下航行器(autonomous undersea vehicle,AUV)由于其自主性强、运动灵活等特点,在海洋观测[1-3]、水下组网[4-5]和水下目标跟踪[6-7]等领域发挥了重要作用。控制系统作为AUV 的重要组成部分,其性能直接影响了AUV 的避障和路径跟踪能力。建立精度高、运算速度快的AUV 动力学模型,对设计和验证控制算法有着重要作用。
机器人动力学建模常用的方法主要有Newton-Euler(N-E)方程、Kane 方程和Lagrange-Euler(L-E)方程。采用N-E 方程建模需要考虑刚体之间的相互作用力,该力属于内力,在建模过程中难以消除。因此,N-E 方程主要用于设计阶段的受力分析或者可以近似为单刚体的系统建模,但解决多刚体建模问题非常困难。例如,尹欣繁等[8]构建了基于N-E 方程的小型旋翼无人机的模型。王林涛等[9]通过N-E 方程研究了四旋翼无人机特种弹药悬停发射时的动力学问题。在建模过程中,将旋翼作为质点,仅提供升力而忽略旋翼自身转动以及旋翼与本体之间的相互作用。L-E 方程从能量的角度解决动力学建模问题。例如,Do 等[10]采用L-E 方程解决了灵活机械手的振动模型线性化难题。Huang 等[11]推导出基于L-E 方程的水下机械手动力学模型。孙志伟等[12]采用L-E 方程对Delta机器人的动力学进行了分析。在建模时,需要计算动能和势能,通过求解2 阶微分方程获得最终的动力学模型,计算机求解效率较低。Kane 方程属于分析力学的分支,引入了广义坐标、广义主动力及广义惯性力等概念,可以分别计算各个模块的广义主动力和广义惯性力,将所有模块的计算结果相加,即可获得最终的动力学模型。因此,该方法非常适合处理多刚体建模问题,并且最终的模型结构简单、运算效率高,满足实时控制的需求。Zhang 等[13]推导出基于Kane 方程的无人自行车动力学模型。Cai 等[14]构建了基于Kane 方程船载Stewart 平台的动力学模型。Caruso 等[15]采用Kane方程的相关知识,分析了太空探测车的动力学问题。Cao 等[16]通过Kane 方程完成了F 直升机吊装系统的动力学建模。Cibicik 等[17]利用Kane 动力学解决了机械手的运动学和动力学建模。
AUV 动力学建模是将舵的作用换算到AUV重心,将整个AUV 近似为1 个刚体处理。这种处理方法无法获得舵与本体之间的相互作用力,不利于舵的设计,在处理更为复杂的AUV 结构时会非常困难。文中基于Kane 方程对十字舵型欠驱动AUV 进行建模,既不需要考虑舵与AUV 本体之间的相互作用力,也不需要计算动能和势能。该方法可以清晰地展示哪些力对AUV 动力学模型有贡献,也可以非常方便地将外界作用力添加到动力学方程中。
1 运动学分析
文中分析了不同坐标系之间的转换问题和广义速度的计算方法,并推导出偏速度和偏角速度的计算公式。
1.1 坐标系
文中采用的坐标系如图1 所示。坐标系之间的转换矩阵为
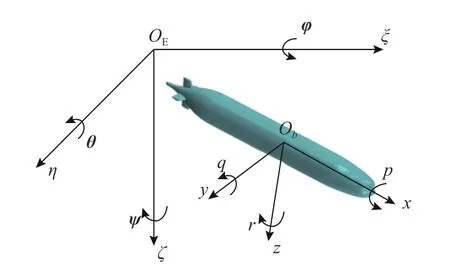
图1 惯性坐标系与载体坐标系Fig.1 The inertia coordinate and body coordinate systems
1.2 广义坐标与广义速度
十字舵型欠驱动AUV 的本体有6 个自由度,十字舵有2 个自由度,因此,广义坐标可以写成
式中:xg,yg,zg为AUV 本体重心相对于惯性坐标系的位置;δs为 水平舵的舵角;δr为垂直舵的舵角。
广义速度为
1.3 角速度与偏角速度
AUV 本体的角速度在载体坐标系 {b}下的矢量形式为
式中:p,q,r为AUV 本体的角速度在载体坐标系{b}下 的表示形式;nx,ny,nz为 与载体坐标系 {b}的3 个坐标轴对应的单位矢量。
同理,水平舵和垂直舵的偏角速度为
1.4 速度与偏速度
AUV 本体重心处的速度在载体坐标系 {b}下的矢量形式为
式中,u,v,w为AUV 本体重心处的速度在载体坐标系 {b}下的表示形式。
AUV 本体浮心处的速度在载体坐标系 {b}下的矢量形式为
式 中:rgc为重心到浮心的位置矢量;xgc,ygc,zgc为rgc在 载体坐标系 {b}下的坐标。
水平舵重心处的偏速度为
式中:xg,s_tail,yg,s_tail,zg,s_tail为AUV 本体重心到水平舵与AUV 本体连接处的矢量在载体坐标系 {b}下的表示形式;xs_tail,sg,ys_tail,sg,zs_tail,sg为水平舵与AUV 本体连接处到水平舵重心处的矢量在载体坐标系{b}下的表示形式。
垂直舵重心处的偏速度为
式中:xg,r_tail,yg,r_tail,zg,r_tail为AUV 本体重心到垂直舵与AUV 本体连接处的矢量在载体坐标系 {b}下的表示形式;xr_tail,rg,yr_tail,rg,zr_tail,rg为垂直舵与AUV 本体连接处到垂直舵重心处的矢量在载体坐标系{b}下的表示形式。
1.5 加速度与角加速度
AUV 本体重心处的加速度的矢量形式为
AUV 本体角加速度的矢量形式为
同理,可以写出水平舵片的加速度asg、角加速度 αs、垂直舵片的加速度arg以 及角加速度 αr在载体坐标系 {b}下的矢量形式。
2 动力学分析
十字舵型欠驱动AUV 由AUV 本体、水平舵和垂直舵组成,可以分别计算每个组成部分的广义主动力和广义惯性力,将各个部分的广义主动力和广义惯性力相加即可获得最终的动力学方程。由于舵和本体相对转动,作用力和反作用力相互抵消。力与第n个偏速度点积即可得到该力对第n个广义主动力的贡献;力矩与第n个偏角速度点积即可得到该力矩对第n个广义主动力的贡献;惯性力和惯性矩分别与对应的偏速度和偏角速度求点积即可得到广义惯性力。
2.1 AUV 本体动力学分析
AUV 本体的质量为mM,惯性张量为IM,受到惯性力、惯性矩、重力G、浮力B、水动力Fh(包括附加质量、科里奥利向心力、粘性类水动力)、水动力矩Th[18]、推进器推力T以及舵对AUV本体的反作用力矩-Tδs(方向为ny)和-Tδr(方向为nz)的影响。
AUV 本体的惯性力和惯性矩公式为
施加在AUV 本体上的Fh、Th、G、B、T、-Tδs和 -Tδr对广义主动力的贡献为
2.2 水平舵动力学分析
水平舵的质量为ms,惯性张量为Is,施加在水平舵上的力主要有惯性力、惯性力矩、重力Gs、浮力Bs、水动力Fs、水动力矩Ts[18]以及舵机施加在水平舵上的扭矩Tδs(方向为ny)。通常情况下,舵片的重心和浮心重合,重力和浮力相等,因此,重力和浮力相互抵消。
水平舵的Fs、Ts和Tδs对广义主动力的贡献为
2.3 垂直舵动力学分析
垂直舵的质量为mr,惯性张量为Ir,施加在垂直舵上的力主要有惯性力、惯性力矩、重力Gr、浮力Br、水动力Fr、水动力矩Tr[18]以及舵机施加在垂直舵上的扭矩Tδr(方向为nz)。通常情况下,垂直舵片的重心和浮心重合,重力和浮力相等,因此,重力和浮力相互抵消,即
垂直舵对广义惯性力的贡献为
垂直舵的Fr、Tr和Tδr对广义主动力的贡献为
2.4 动力学方程
十字舵型欠驱动AUV 的动力学方程为
3 仿真验证
为了验证动力学模型的有效型,在Matlab/Simulink 环境下构建仿真验证平台。以中国海洋大学自主研制的210 型AUV 为仿真对象,其质量63 kg,长度2.1 m,惯性张量Iyy=Izz=17.362 kg·m2,水动力系数分别为:Xu˙=0.000 486 4,Zw˙=0.054,=0.002 443,Xu=0.000 303 4,Zw=0.052 75,Mq=0.004 988,Xu|u|=0.002 408,Zw|w|=0.103,Mq|q|=0.033 5。
动力学模型在S 函数中求解,采用滑模控制器,解决深度控制和水平面的路径跟踪问题。由图2 可知,0~15 s 为AUV 的下潜过程;10~40 s 为AUV 的过渡过程,通过调整水平舵角实现;40 s 后,AUV 稳定在10 m 水深。图3 为下潜过程中纵倾角的变化曲线。图4 描述了AUV 在水平面内的圆周运动,开始阶段AUV 的位置坐标为(20,20),该点并不在期望轨迹上,通过控制算法调整垂直舵角,AUV 最终可以跟踪圆形轨迹。图5 给出了路径跟踪过程中的速度变化曲线,图6 为推力和扭矩的变化曲线。仿真结果符合AUV 的运动规律,进一步验证了文中模型的正确性。
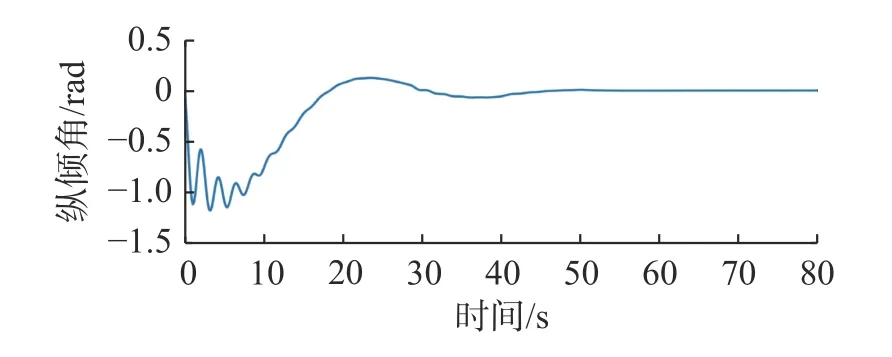
图3 AUV 纵倾角随时间变化曲线Fig.3 Curve of pitch angle of AUV versus time
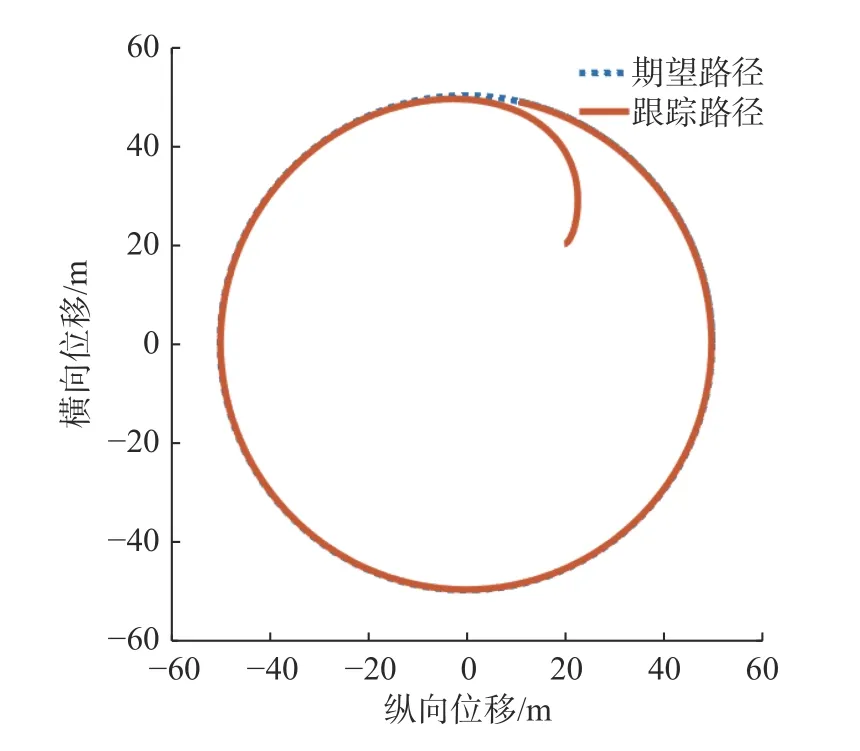
图4 AUV 路径跟踪结果Fig.4 Results of AUV path tracking

图5 路径跟踪速度随时间变化曲线Fig.5 Curves of the speed of path tracking versus time

图6 推力和扭矩随时间变化曲线Fig.6 Curves of thrust and torque versus time
4 结束语
文中详细介绍了基于Kane 动力学的十字舵型欠驱动AUV 的建模方法。该方法可以简化相互作用力或力矩的处理过程,便于施加外界约束,从而非常清晰地展现哪些力对广义主动力或广义惯性力有贡献。最终的动力学模型形式简单,计算机求解效率高,满足实时控制的需求。通过水平面路径跟踪问题和垂直面定深问题的仿真实验,验证了该模型的有效性。
