以列车为中心自主控制系统研究
2023-12-27冯浩楠
冯浩楠
(中国铁道科学研究院集团有限公司 通信信号研究所,北京 100081)
0 引言
为了不断提升运营效率,轨道交通的列控系统经历了4 个发展阶段:第一代列控系统是基于时间维度的列车间隔;第二代列控系统是依靠轨旁的(电子)机械信号,实现空间维度的列车间隔,即固定闭塞;第三代列控系统是基于移动通信技术,打破固定闭塞限制,车地协同控制列车前进,实现列车逻辑区间间隔,以城轨领域的基于通信的列车控制系统(CBTC)和国家铁路干线的CTCS3 系统为应用代表;第四代列控系统是基于车车通信技术和环境感知技术,进一步提高列车自主性,缩短列车运行间隔。
在第三代列控系统中,以城市轨道交通领域应用的CBTC系统为例,其具备精准列车控制、连续列车间隔控制和超速防护等特点,成为国内外城市轨道交通系统的首选[1-2]。但是作为以地面为中心的控制系统,CBTC 系统存在系统复杂、信息链过长等缺点,列车运行的效率和规模受限[3-5]。CBTC系统中的联锁系统(CI)、区域控制系统(ZC)、车载控制系统(VOBC)等子系统各自有一套复杂的控制逻辑,协同控制列车的安全运行,碎片化的控制方式存在重复计算、协调费时等缺陷[6-7]。
为了克服上述缺陷,以列车为中心的自主控制系统通过列车之间的直接通信和协调控制,实现以列车为中心和车地功能一体化,进而减少轨旁控制系统数量,实现降低信号系统投资成本和便利后期维护的目的[8-9]。以城市轨道交通领域的CBTC为比较对象,在介绍以列车为中心自主控制系统架构基础上,对以列车为中心的自主控制系统的特点进行分析,为其应用推广提供借鉴。
1 以列车为中心自主控制系统架构
1.1 系统架构
以列车为中心自主控制系统包括车载系统和地面系统。车载系统包括支持T2T 的车载通信设备、自动列车运行(ATO)、自动列车防护(ATP)、用于位置校准的应答器天线;地面系统由列车自动监督(ATS)、资源管理器(RM)和对象控制器(OC)组成。以列车为中心自主控制系统架构如图1所示。

图1 以列车为中心自主控制系统架构Fig.1 Architecture diagram of train centric autonomous control system
与CBTC 中ZC 计算移动授权(MA),CI 控制道岔并建立进路核心控制逻辑不同,以列车为中心自主控制系统的车载系统ATP生成移动权限,通过与前列列车直接通信接收位置和速度信息,同时结合来自RM的资源占用情况,计算出速度曲线,确定列车的运行权限,并控制与前车的安全距离。ATO实现列车自动驾驶、精准停车、无人折返等功能。ATS系统实现监控路线上所有列车的状态,提供列车运行时刻表。RM 管理共享资源,即轨旁设备:轨道、道岔和屏蔽门,OC接收车载或ATS的指令,控制轨旁设备。
1.2 差异分析
与CBTC系统相比,以列车为中心的自主控制系统系统架构的改变引起了控制逻辑、功能、设备、接口的转变,以列车为中心的自主控制系统和CBTC系统对比如表1所示。

表1 CBTC系统控制信息含义Tab.1 Control meaning of CBTC system

表1 以列车为中心的自主控制系统和CBTC系统对比Tab.1 Comparison of train-centric autonomous control system and CBTC system
2 以列车为中心自主控制系统的新增功能
目前,以CBTC为代表的以地面为中心的铁路信号系统中列车智能化水平不高,智能化主要集中在地面控制系统中,列车由地面系统指挥控制,不能自主决策,自动化水平受限。为了克服上述缺陷,以列车为中心的自主控制系统在架构上进行了以下改变。①列车自主计算和控制运行过程所需的资源,实现列车自主安全运行。②列车之间根据列车间协议和轨道资源的优先级约定,解决列车冲突资源锁死的情况;实时交换列车状态,可实现自组织虚拟编队。③列车具有预测资源竞争、处理事故/故障情况的能力。④在以列车为中心的自主控制系统中,操作员从干预者转换为监督者,更有效地响应系统事故或者故障情况,提高安全性。系统新增功能具体包括车车通信和控制、列车对资源管理、环境状态感知等。
2.1 车车通信和控制
车车通信作为以列车为中心自主控制系统中列车间通信的主要方式,须满足相邻范围内列车协作控制的安全通信需求,完成列车识别、通信管理和移动授权计算等功能。①识别前车。每列车载自身有轨道数据库。列车根据计划进路中轨道资源状态和自身位置确定须通信的前方列车。在通信距离允许的情况下,可通过设备到设备(D2D)通信技术直接通信,在距离较远或者信道质量不好情况下,可通过基站中转方式间接车车通信[10-11]。②通信管理。在接收前方列车的运动信息后,相邻列车建立追踪关系,列车之间保持定期通信,对追踪状态进行周期检测,当不满足追踪关系时,断开通信连接。③列车自主计算移动授权。在以列车为中心自主控制系统中,列车通过应答器进行定位,结合轨道数据库和相邻列车运动信息,自主计算移动授权,实现列车的安全运行。与CBTC系统或者CTCS相比的“硬撞墙”控制方式不同,以列车为中心的列控系统采用“软撞墙”控制算法,考虑前车速度、加速度信息,不断缩短列车运行间隔。
2.2 资源管理
以列车为中心的自主列控系统的资源包括轨道区段、道岔和屏蔽门(PSD)。所有共享资源都由RM进行管理。列车通过RM对资源进行预留、释放和控制操作。能够占用和控制资源的对象包括ATS和列车。ATS 有权控制和恢复列车占用的共享资源。但是,列控系统只有在安全释放共享资源状态时,才可将其共享资源转移给ATS。列控系统只有在安全占用资源后才可进行控制。在临时限速的特殊情况下,列控系统可立即对共享资源进行控制。
2.3 环境状态感知
列车环境状态感知包括列车对内部和周围环境状态的感知,处理运行过程中的紧急状况。
(1)列车上的紧急情况。在列车发生故障的情况下,列车将以降级模式减速运行或停止运行。在必须停止操作的情况下,尝试进入最近的站台让乘客下车。列车故障因素包括:车厢故障、列车低速运行的条件(如列车推进装置的故障等)、列车停止条件(行驶到最近的站台并打开车门)以及必要时的紧急停止条件(列车无线电设备故障等)。在识别列车故障后,采取措施包括:列车临时限速、列车运行路线修改、列车紧急制动。当列车发生火灾事故时,根据火灾的严重程度,列车直接停在轨道上或进入最近的站台让乘客下车。如果车内发生紧急的事故,列车会通知ATS控制并停在最近的站台。
(2)轨道上的紧急情况。轨道上的紧急情况包括人或障碍物在轨道上的存在或碰撞、轨道缺陷、道岔故障、PSD故障、隧道或站台起火等。当发现区域有人或障碍物出现在轨道上时,则封锁该区间禁止列车进入。RM 实时监控轨旁设备状态,列控系统通过RM获得轨旁状态,根据其判断检测区间是否需要设置为临时限速或禁止进入的保护区间。如果需要,列控系统通过RM将区段设置为临时限速区段或保护区段。
3 以列车为中心自主控制系统关键技术
3.1 车车通信和控制
以列车为中心自主控制系统的列车车车通信和控制步骤如下。
(1)运行区间的物体识别。列车移动授权的最大距离为r。在以列车为中心自主控制系统中,列车与半径为2r的固定区域内所有物体(列车、道岔和PSD)进行通信。
(2)选择前车。列车的车载系统具有全局基础设施数据库,根据自己位置和运行方向选择前车,在接收区域内列车位置后,选择前车并定期交互列车的运动信息、状态和移动授权等信息。
(3)自主计算列车移动授权。以列车为中心的自主控制系统中,列车运行基准都由应答器标签(TAG)标定。列车根据安装在轨道上的TAG搜索前方列车,移动授权的计算与现有CBTC 系统中的ZC 的移动授权计算方法类似。如果前车不存在,列车的移动权限为最大移动权限距离r,如果前车位于本车的最大移动权限距离内,则列车的移动授权确定到前车的最小安全车头处。在CBTC 系统中,列车的移动授权由地面ZC计算并发送给列车,而在以列车为中心的自主控制系统中,移动授权由列车根据周边环境和自身状态自主动态计算。
(4)共享资源初始值的安全设置。与CBTC 系统中进路理念的联锁逻辑不同,以列车为中心自主控制系统的车载系统基于全局基础设施数据库,通过与RM信息交互,接收前方线路的道岔的状态并通过OC进行控制,实现列车的运行。
3.2 资源管理
在以列车为中心的自主控制系统中,轨道资源包括轨道区段、道岔和PSD。资源控制实体是列车和ATS。以列车为中心的自主控制系统将资源的所有权和控制权进行区分。
RM 管理资源的完整性和所有权状态。资源的完整性意味着其处于可以将轨道资源分配给所有者的安全状态。如果轨道区段、道岔或PSD故障,或者被设置了保护段,则不会将资源分配给列车。轨道资源的所有权指RM提供计算列车运行所需距离限制所需的资源信息和资源权限(RA)。列车除了通过列车间通信接收前车的运行状态信息外,还需通过RM获取所需的RA。RM 根据每个请求授予一个新的RA。授予资源所有者的RA须为唯一不重复使用的数值,具有足够长的码位。RM 在收到资源释放请求时,应检查与赋予资源的RA 值是否匹配,只有匹配时才将资源转为未占用状态。
3.3 环境状态感知
列车的紧急情况运行场景可分为3 类:列车状态异常或脱轨、线路或车站状态异常及自然灾害等紧急情况。
在轨道交通系统地面和车上安装传感器来收集周围环境状态数据,包括降雪/降雨、线路洪水、障碍物/坠落物体、风速、入侵和轨道温度。地面传感器将采集数据进行处理后调整采集周期存储在数据处理模块中,并传输到车载感知模块。地面环境状态数据具体包括线路缺陷、电源故障、平台火灾、PSD故障等数据。车载环境状态数据包括车载牵引制动系统状态、车门是否异常、烟感状态、火灾情况、脱轨等数据。车载感知模块通过接收地面环境数据、车载传感器获取的环境数据和车载地图的路线数据,计算每个路线的限速,输出包括各路段的限速、可否行驶、可否停车等信息。
4 以列车为中心自主控制系统特点
4.1 系统控制信息流
4.1.1 CBTC系统控制信息流
一条线路通常由多个控区组成,每个控区内包括一个ZC和一个CI,构成地面安全控制系统核心,为列车安全运行提供所需的区段信息,防止2 列或多列列车同时占用同一区段[12]。CBTC 系统控制信息流程如图2所示,CBTC系统控制信息含义如表1所示。
4.1.2 以列车为中心自主控制系统控制信息流
在以列车为中心自主控制系统中,将CI 和ZC的功能集成到车载系统中,实现灵活的列车运行。列车无需与地面控制系统同步信息,直接控制列车行驶所需的安全距离和进路中的道岔方向。在列车运营计划改变时,只需更改控制ATS 的任务信息,即可更改列车运行计划。列车可根据运行情况灵活地控制道岔方向,保持与前车安全距离任意停靠站台,以列车为中心自主控制系统的控制流程如图3所示,以列车为中心自主控制系统的控制信息含义如表2所示。
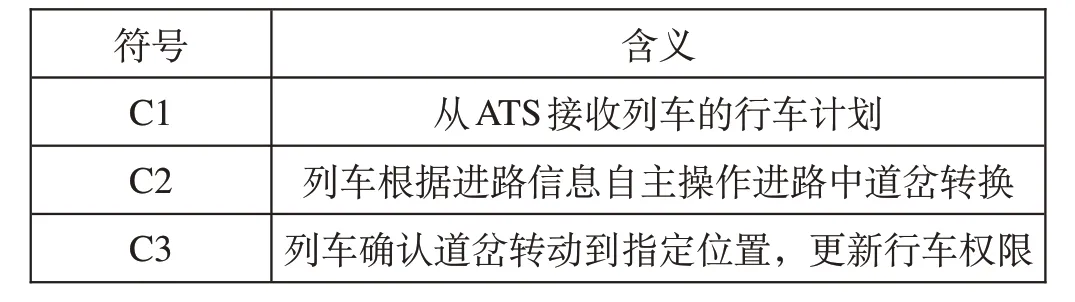
表2 以列车为中心自主控制系统的控制信息含义Tab.2 Control meaning of train-centric autonomous control system

图3 以列车为中心自主控制系统的控制流程Fig.3 Control flow of train-centric autonomous control system
4.2 道岔区间控制逻辑
4.2.1 CBTC系统道岔区间控制逻辑
CBTC 系统中,列车2 将移动授权到从X 延伸到Y,须经过区段A,C和道岔区段B,CBTC道岔区段控制如图4所示,控制流程步骤如下。

图4 CBTC道岔区段控制Fig.4 Switch section control of CBTC system
(1)列车将位置传送到ZC。
(2)ZC向CI提供包括列车位置在内的信息。
(3)CI在确认道岔区段B无列车后,发送道岔转换命令给道岔(P1,P2),改变道岔方向。
(4)CI确认进路内的道岔转换到位。
(5)CI向ZC提供列车进路信息。
(6)列车从ZC收到新的移动授权(Y)。
CBTC中的CI仍采取固定闭塞的联锁逻辑,即如果列车1 占用道岔区段B,CI 无法为列车2 创建进路,只有当列车1 的后部完全出清道岔区段B时,CI才能创建进路和更新移动权限。锁闭范围较大,降低了道岔区段的通过效率。
4.2.2 以列车为中心自主控制系统的道岔区间控制逻辑
以列车为中心自主控制系统取消地面CI 和ZC系统,将CI 进路排列、区间控制和轨旁设备控制的逻辑与ZC 的行车授权计算功能和列车车载的保护功能融合,车载系统将现有轨道区段转换为最小信号量区域,在最小信号量区域内必须只有一列列车,进路的控制转换为最小信号量区域的资源分配。与CBTC系统相比,以列车为中心自主控制系统的检查道岔区段范围缩减,新的移动授权可延伸至Y,列车快速通过。以列车为中心自主控制系统的道岔控制如图5所示。

图5 以列车为中心自主控制系统的道岔控制Fig.5 Switch control of train-centric autonomous control system
4.3 运行性能
4.3.1 CBTC运行性能
在CBTC系统中,前车报告自身位置状态给地面控制系统(ZC和CI),后车再从地面系统(ZC)接收移动授权信息,在制动速度曲线实现安全运行,CBTC 的列车间隔控制流程如图6 所示。列车区间运行中控制引入了时延Ti(i=1,2,…,7)和列车运行间隔Lj(j=1,2,…,5)。CBTC 控制流程中的时延和安全距离如表3 所示。列车间隔分为2 部分:前车信息到达后车时延产生的前车运行距离的列车运行间隔I 段、后车识别前车制动停车的距离和安全裕度组成的列车运行间隔II段。

表3 CBTC控制流程中的时延和安全距离Tab.3 Time delay and safety distance in the control flow of CBTC system
4.3.2 以列车为中心自主控制系统运行性能
以列车为中心自主控制系统通过车车直接通信和系统处理流程优化,缩减了系统信息时延和列车运行间隔,提升运行效能。
针对列车运行间隔I段,在CBTC系统中,车地控制流程的时间链为T1→T2→T3→T4→T5→T6→T3→T7→T8;在以列车为中心自主控制系统中,通过T2T直接通信缩短系统处理周期,缩短为T1→T2T→T3,以列车为中心自主控制系统的I 段列车间隔压缩如图7所示。第I段的列车间距提升效率rI计算如公式⑴所示。

图7 以列车为中心自主控制系统的I段列车间隔压缩Fig.7 Decrease in gap I by train-centric autonomous control system
针对列车运行间隔II段,以列车为中心自主控制系统采用相对制动模式,通过前车和后车交换列车的位置、速度、加速度等运行状态信息,对列车间隔进行缩短。车1将计算的ATO速度曲线制动距离D7和紧急制动减速曲线的制动距离(D6+D7)传输到车2。车2所需的制动距离(D1+D2)和安全裕量D3可减去ATO 速度曲线制动距离(D6),以列车为中心自主控制系统的II 段列车间隔压缩如图8 所示,第II段的列车间距提升效率rII计算如公式⑵所示。
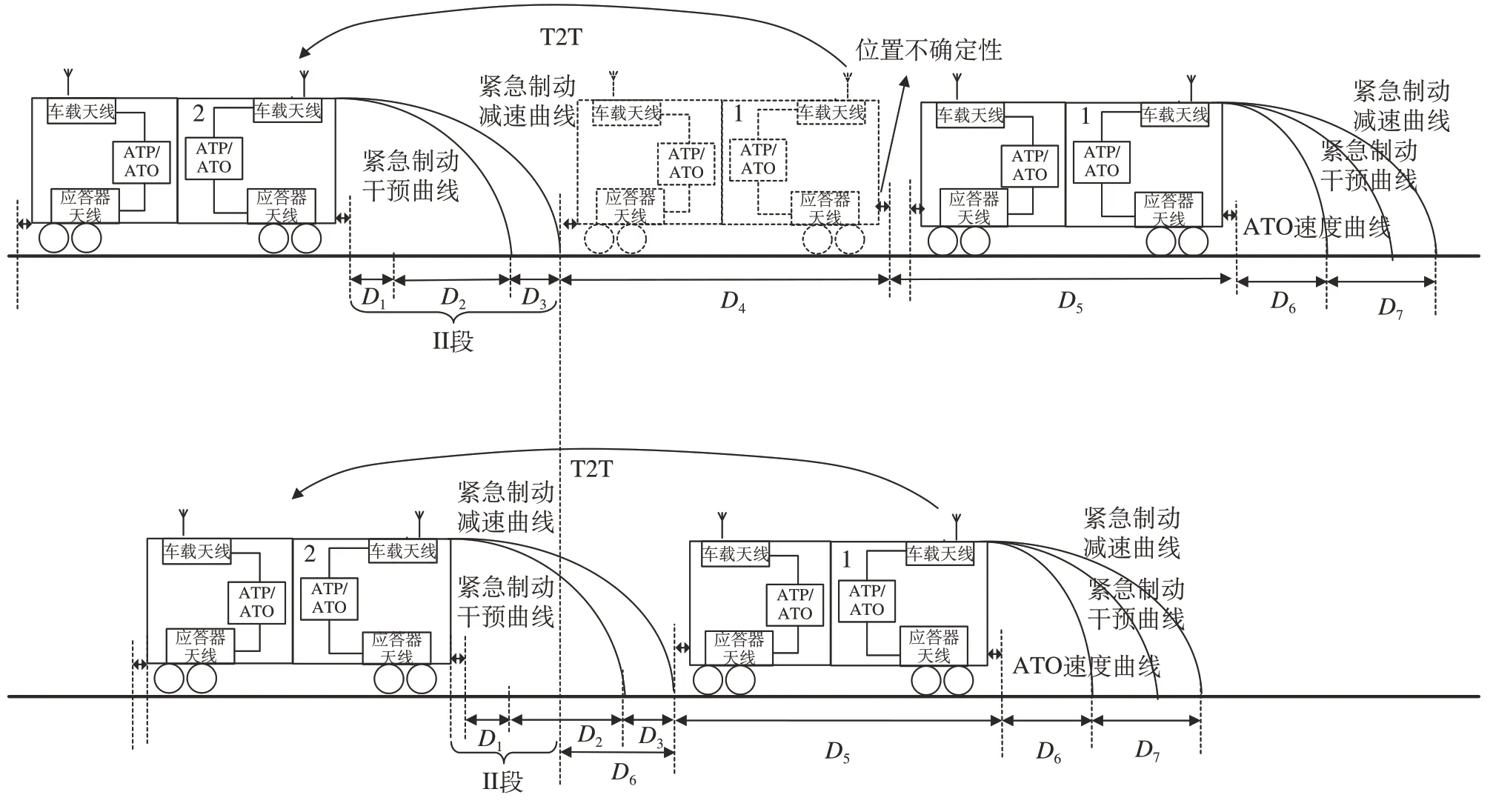
图8 以列车为中心自主控制系统的II段列车间隔压缩Fig.8 Decrease in gap II by train-centric autonomous control system
式中:D1=L1;D2=L2;D3为安全裕量;D6为ATO速度曲线制动距离。
4.4 系统控制规模
在CBTC 中,ZC,CI 等地面控制系统为控区内的所有列车提供安全进路。在IEEE 1474-1 标准参数中,ZC 的处理能力为10~40 个编队,如果超过40列车编队上限,需增加地面ATP控制系统。
在以列车为中心自主控制中,去掉地面控制系统,克服了系统处理能力的限制。地面取消ZC 和CI系统,列车执行ZC和CI功能,与周边列车进行通信协同,在保障进路所需必要轨道资源条件下,根据其他列车的信息自主提供进路和移动授权。当线路需扩展或变更时,无需改变地面控制系统,仅通过ATS系统改变给列车的任务即可,突破系统列车编队限制。
4.5 操作灵活性
在CBTC系统中,列车间的物理连挂可能被信号系统识别为碰撞,需提前封锁列车的进出进路防护。列车的物理连挂和解挂须通过操作人员的语音和手势人工指挥进行,没有信号系统保护。物理连挂和解挂场景只能在直向线路,前方列车停稳后才可进行操作。
以列车为中心的自主控制系统提出虚拟连挂和解挂,利用先进的无线通信技术和列车运行时的控制技术,在行车过程中,通过虚拟连接器实现列车的自由连挂和解挂,增强了列车操作的灵活性。信号系统全程监控和执行虚拟连挂编队,突破CBTC系统物理连挂和解挂的时间和空间的限制,同时预防意外情况出现,快速安全实现列车的虚拟连挂和解挂。
4.6 可靠性
系统的可靠性由系统失效率确定。与CBTC系统中每个控区有地面控制系统(ZC,CI)情况不同,以列车为中心的自主控制系统取消了地面控制系统。定义CBTC 的故障平均时间MTTFCBTC和以列车为中心的自主控制系统的故障平均时间MTTFTCACS比例rMTTF评估可靠性提升效率[13],如公式⑶所示。
式中:λ为系统故障率,假设每个设备的故障率相同;系统的控区数为n;列车数量为k。由于n≥1,k≥1,与CBTC 系统相比,以列车为中心的自主控制系统可靠性提高倍,CBTC系统和以列车中心自主控制系统MTTF提升比例如图9所示。
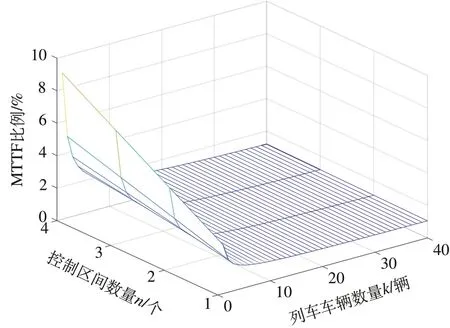
图9 CBTC系统和以列车中心自主控制系统MTTF提升比例Fig.9 MTTF increased ratio between CBTC system and train-centric autonomous control system
4.7 拓展性
以地面为中心的信号系统架构复杂,列控系统自动化等级升级或者变更时,特别是在城市轨道交通、城际铁路、市域铁路、国铁干线铁路四网融合场景应用时,地面和车载系统须进行同时修改和大量测试,系统间互联互通工作会遇到众多瓶颈[14-15]。
以列车为中心的自主控制系统主要集中在列控系统,在城市轨道交通、普通铁路和高速铁路多个场景进行列控系统的GoA4 级无人驾驶适应扩展,系统修改量相对较小,扩展性适应性强。
5 以列车为中心自主控制系统运行场景
CBTC 系统在列车运行过程中发生系统错误时,需要人工介入,列车自身无法恢复,而以列车为中心的自主控制系统智能化水平不断提升。以列车为中心的自主列控系统的运行场景可分为以下3 种情况。
5.1 列车自主运行场景
在正常运行模式下,根据列车时刻表在站台到达、停止和离开。运营开始前在列车段进行准备工作,运营结束后进行清理工作。列车运行期间在检查站进行检查,维修人员以人工操作方式对列车进行检查。正常运行场景如下。
(1)开始运营:从系统启动到开始运营所有任务。
(2)运营结束:从运营业务结束到系统关闭的任务。
(3)正常情况:按计划在正线正常运行。
(4)特殊情况:超出正常情况的情况,如轻微延误、限速等情况。
5.2 列车降级运行场景
降级的运行场景通常是由于系统故障引起,此外还和操作优化、系统故障管理和维护等活动相关。在降级运行场景中,列车不遵循ATS的列车时间表。列车按照自己的子时刻表自行运行,但需在ATS的监督和控制下运行。列车子时刻表基于各种策略,尽量减少因列车故障和地面设施故障造成的停运时间。
5.3 列车应急运行场景
在火灾、停电等紧急事故的应急运行场景下,列车选择相应的运行策略。如果系统出现临时故障,列车在判断自身状态和周边感知的基础上,在满足安全条件情况下,无需人工干预,可自行安全地初始化其位置和行驶方向,返回之前的行驶状态。当运行过程中出现严重系统故障,操作人员在遥控检查列车前方安全的基础上,可远程系统重启或远程控制操作列车,实现远距离无人自动化。当紧急状态的列车无法自动运行,必须使用救援车将其拖至疏散线。为确保拖曳空间,须将相关区间与运行区间分开,禁止列车进入拖曳作业区间,将故障列车先牵引至疏散线,在运营结束后移至停车场。
6 结束语
与现有的以地面为中心的列车控制系统相比,以列车为中心的自主控制系统增强列车运行和控制的灵活性、克服以地面为中心控制系统架构的运输能力限制、增强系统的可靠性、提升了系统的扩展性,便于线路拓展和升级、增加系统的故障处理能力,减少人工维护操作、提升系统自主化和智能化,通过简化轨旁控制设备,确立以列车为中心的控制范式,带来系统效率的总体提升,成为下一代轨道交通列车控制系统重要发展方向。
