气液两相流中液滴识别及体积计算
2023-12-06苏明裴世红
苏明,裴世红
(沈阳化工大学 化学工程学院,辽宁 沈阳 110142)
气液两相流研究对多个领域具有重要意义,而液滴识别和体积计算则是气液两相流研究的重要问题。液滴体积是液滴的重要物理属性之一,在数值模拟中具有重要意义。它可以帮助研究人员更准确地预测液滴的行为,包括液滴的形态、运动、分离和融合等。通过计算液滴体积,还可以了解液滴的大小、形状、表面张力和内部流体压力等参数,以便更好地设计和优化液滴相关的工艺和应用。因此,在液滴相关研究和应用中,计算液滴体积是不可或缺的一部分,具有重要意义。
液滴的形态受到多种条件的影响,其中包括两相性质、气流和壁面等,这导致构成液滴的微观离散粒子与液滴之间的关系不清晰,并使得在空间上识别和计算液滴体积变得非常困难。为了解决这些问题,提出一种结合带有噪声的基于密度的空间聚类算法(Density-Based Spatial Clustering of Applications with Noise,简称DBSCAN算法)和光滑粒子流体动力学方法(Smooth Particle Hydrodynamics Method,简称SPH方法)的新方法来解决气液两相流中液滴的识别和体积计算问题,该方法能够应对复杂的液滴分布结构和形态,并具有良好的可行性和较高的准确性。
1 计算方法
1.1 液滴识别
DBSCAN算法是由Ester等[1]开发的聚类算法,Tian等[2]应用该算法于气固两相流中颗粒团簇的识别,并验证了该方法在微小粒子间的识别方面的有效性。该算法通过输入离散粒子的位置信息和指定DBSCAN模型参数来快速准确地识别液滴,其可适用于各种形态的液滴。以下是对该算法相关概念和实现步骤的简要介绍。
1.1.1 相关概论
DBSCAN算法是一种基于密度的可表示聚类识别方法。它将聚类定义为按密度连接的最大点集,该算法可以发现任意形状和大小的聚类。算法有两个关键的输入参数,第一个参数是搜索半径eps,它定义了离散粒子搜索邻域粒子的搜索半径大小,第二个参数是密度阈值MinPts,MinPts是属于所谓核心点的相邻点的最小数量,eps和MinPts通常由人为指定大小。为了准确描述该算法,给出以下定义:
eps邻域:一个样本数据p,p的邻域用Neps(p)来表示,以数据p为中心eps为半径的区域内,即:
Neps(p)={q∈D|dist(p,q)eps}
(1)
其中,D为数据集;dist(p,q)表示D中两个数据对象p和q之间的距离;Neps(p)包含了数据集D中与对象p距离不大于eps的所有对象。
核心点和边界点:若点p的邻域粒子数大于设定的最小点数阈值,则点p为核心点,若小于设定的最小点数阈值且在某个核心点的邻域内,则为边界点。
直接密度可达:给定样本数据p、q,满足p∈Neps(q)且|Neps(q)|≥MinPts,则称对象p是从对象q密度直达的。
密度可达:若数据集D中存在对象p1,p2,…pn,存在0 密度相连:若对象p、q、r同属一个数据集D且对象p和q是通过r密度可达,则称对象p和q密度相连。该过程是对称的。 聚类和噪声:由任意一个核心点对象开始,从该对象密度可达的所有对象构成一个聚类,如果p的阈值密度小于MinPts,并且p的eps邻域中的所有点都是边界点,则点p是噪声点。 DBSCAN算法根据以下内容建立聚类:首先,如果|Neps(p)|≥MinPts,则点p将作为核心点,并将创建一个新的集群。接下来,新的聚类被从p密度可达的点不断展开。重复此过程直到找不到新的聚类。另一方面,如果|Neps(p)|≤MinPts,则点p将是一个噪声,但是如果这个离散点从某个核心点密度可达,则它可以包含在另一个聚类中。如图1所示,给定距离eps和参数MinPts=3,红色点表示核心粒子,因为在尺寸为eps的壳层内至少存在3个相邻粒子。红色点由双向箭头连接,表示它们是相互连接的核心粒子。红点构成了聚类的核心。点B、C和D不是核心粒子,但可以从至少一个红点直接到达(如单向箭头所示)。它们形成了团聚的边界。红圈所覆盖的区域被视为一个簇,因为其中的粒子要么属于簇核,要么可以从簇核直接到达。点N是一个异常值,即噪声点。 图1 DBSCAN方法的示意图[2] 1.1.2 实现过程 对于三维空间中的离散粒子,本文使用欧几里得距离作为距离度量标准,对于给定的数据库中的数据集,任意两个离散粒子之间距离的大小,反映了其是否可以被识别到同一个液滴中。本文使用DBSCAN算法识别液滴的步骤如下: 1) 解析样本数据文件; 2) 计算每个粒子与其邻域27个网格内所有粒子之间的欧几里得距离; 3) 计算每个粒子的k-距离值,并对所有粒子的k-距离集合进行升序排序,输出排序后的k-距离值; 4) 根据给定的MinPts、eps,计算得到所有核心粒子,并建立核心粒子与到核心粒子距离小于半径eps的点的映射; 5) 根据得到的核心粒子集合,以及半径eps的值,计算能够连通的核心粒子,并得到离群粒子; 6) 将能够连通的每一组核心粒子以及到核心粒子距离小于半径eps的粒子,都放到一起形成一个液滴。 由离散粒子构成的液滴在三维空间中的大小无法估计,表面形状更是复杂,这就导致使用一般方法计算液滴体积异常困难。为了解决该问题,在此引入SPH方法[3],该方法是一种基于粒子的模拟方法,与传统的模拟方法不同,它无需网格计算空间导数。相反,它基于分析插值微分公式的原理,能够解析地表达空间导数项,从而将动量方程和能量方程转化为一系列常微分方程。由于SPH方法不依赖网格,因此可以避免在处理具有大变形自由表面的问题中出现的网格缠结和扭曲问题。理论上可以处理任意边界大变形问题,因此非常适合用于液滴体积问题的计算。 在SPH方法中,位置为xi的物理量Ai可以根据其邻域粒子进行核插值得到,即 (2) 其中,N是支持域内邻域粒子数,xij=xi-xj,mj为粒子质量,W为紧支域半径为h的光滑核函数。 所以根据式(2),可得粒子i的密度为: (3) SPH离散方程严格满足质量守恒定律,则由式(3)可进一步推导出粒子i的体积为: (4) 式(2)中光滑核函数W(xij,h)的选取非常重要,它与粒子的支持域尺寸和函数近似息息相关,还决定了核近似和粒子近似的一致性和精确性。许多科研人员对光滑核进行了研究,并提出光滑核函数应满足如下要求[4-7]: 1)在支持域时进行积分时满足正则化条件(归一性): (5) 2)紧致性。SPH方法中通常认为只有支持域内的粒子对给定粒子有影响因此核函数必须具备紧支性条件,即: W(x-x′)=0,|x-x′|>κh (6) 式中,κ为比例因子,h为光滑长度。 3)非负性: W(x-x′)0 (7) 4)狄拉克函数条件: limW(x-x′)=δ(x-x′) (8) 5)偶函数、递减性及充分光滑性质。 理论上,同时具备上述5个条件的函数都可以被用来当做SPH方法的光滑核函数。目前常见的核函数有以下几种:高斯型核函数、钟型核函数、三次样条核函数、二次核函数及五次样条核函数[8],其中三次样条核函数[9-10]是现有SPH文献中应用最为广泛的光滑函数。因此选取三次样条核函数作为光滑函数计算液滴体积,其形式如下: (9) 其中s=|x-x'|/h,αd是与维度d相关的归一化因子,在三维中αd=15/62πh3。 2.1.1 算例设计 为了验证结合方法的正确性,使用具有不同数量粒子的三个不同离散体来进行实例计算。这些离散体包括粒子数为29 147个的椭球体(参见图2a)、粒子数为17 093个的环面体(参见图2b)和粒子数为104 630个的圆锥半球体(参见图2c)。椭球体、环面体及圆锥半球体的方程和体积计算公式如下: (a)椭球体;(b)环面体;(c)圆锥半球体。 2.1.1.1 椭球体 曲面方程: (10) 体积计算公式: (11) 其中a=20,b=15,c=10。 2.1.1.2 环面体 曲面方程: (12) 体积计算公式: V=2π2Rr2 (13) 其中R=15,r=5。 2.1.1.3 圆锥半球体 曲面方程: (14) 体积计算公式: (15) 上述离散粒子集中,粒子粒径dp=0.85,因此在结合算法中设置eps=2dp,MinPts=1,光滑长度h=0.85。 2.1.2 验证结果与分析 在使用结合方法计算2.1.1中生成的离散粒子集后,经识别得出空间中存在3种液滴。液滴数量以及每个液滴的粒子数与2.1.1中的初始设置完全一致:第一种液滴包含29 147个粒子,第二种液滴包含17093个粒子,而第三种液滴包含104 630个粒子。 为了验证使用SPH方法计算液滴体积的准确性,这里使用公式法和体素计算法做对比验证。如下是体素方法计算液滴体积的简单流程: 1)首先需要将待计算的液滴数据集置于一个最大包围盒中; 2)将该包围盒分割成若干个体素,体素的大小要与液滴粒子直径相同(即体素边长e=dp=0.85); 3)遍历所有体素,若该体素内有粒子,则将该体素的体积加和,最终得到液滴的体积。 使用2.1.1中公式、SPH方法及体素计算法分别对识别的椭球体、环面体和圆锥半球体计算体积,计算统计结果如表1所示: 表1 三种方法体积计算对比表 通过公式法计算得到的体积为标准体积。表1表明SPH方法与公式法关于三种形体体积计算的相对误差分别为椭球体2.1%、环面体1.5%和圆锥半球体2.1%,而体素方法与公式法在三种形体体积计算的相对误差分别为20.3%,23.1%和21.3%。通过对比,可以发现相较于体素方法而言,SPH方法计算得到的体积与标准体积的相对误差仅在2%左右,并且对计算形体不敏感。因此,SPH方法不仅精度高,而且更具有普适性。 航空发动机加力燃烧室、冲压发动机燃烧室和超燃冲压发动机燃烧室,通常使用射流将液态燃料喷入横向气流中实现掺混过程。这种方式会使得液态燃料发生破碎雾化,从而获得小尺寸的液滴并大幅增加液体燃料的表面积。这些效应可以显著提高点火能力、拓展燃烧范围,并减少废气排放与污染物。 液体从横向射流出口喷出到完全雾化需要经历两个过程:液柱变成大液滴为一次雾化,接着大液滴进一步破碎变成小液滴为二次雾化。图3展示了这一过程。下面使用液滴识别及体积计算方法对液体横向射流雾化结果进行计算,得到雾化后液滴群的粒径分布,并分析液体破碎的雾化程度和雾化效果,展示其应用场景。 图3 横向气流中射流破碎雾化过程[11] 2.2.1 计算设置 图4展示的为横向射流雾化结果图,计算区域的范围是850×500×150(无量纲)的长方体,粒子总数为N=332 674,粒子粒径dp=0.85。因此本次计算的参数设置如表2所示: 表2 计算参数设置 图4 横向射流雾化结果图 2.2.2 计算结果与分析 雾化的目的是使液体破碎成多而小且滴径均匀的小液滴,但是现实中液滴的大小并不相同,为了方便研究问题,这里使用假想的均匀尺寸液滴来代替现实中不均匀尺寸的液滴。因此引入索特尔平均直径(Sauter Mean Diameter,简称SMD)[12]来表示液滴的平均直径,表达式为: (16) 其中,di为液滴的等体积直径,ni为粒径是di的液滴数。 在横向气流速度下,计算得到沿X轴方向的液体破碎后液滴群的SMD变化如图5所示: 图5 液滴平均SMD沿X方向的变化 由图5可以发现,喷口后的一小段距离内,在横向气流的作用下液滴群的SMD减小较为迅速,此时液柱破碎为大液滴,随着气流的进一步冲击,液滴群的SMD也随着向前推进而逐渐变小,说明雾化程度也在逐步加深,直到SMD维持在5(无量纲)左右,雾化过程完毕。 从上述分析中可知,可以通过液滴群的SMD变化得到液体破碎后的雾化程度,而雾化效果则可通过各粒径液滴数百分比分布得到。如图6所示,液体破碎雾化后极小液滴(粒径在1~2(无量纲)左右)数占液滴群总数的93%左右,小液滴(粒径在2~3(无量纲)左右)数占据液滴群总数的6%左右,说明液体破碎后的液滴主要以极小液滴和小液滴为主,反应总体的雾化效果较好。 图6 各粒径液滴数百分比分布 本文将DBSCAN算法和SPH方法结合,可用于解决气液两相流中液滴识别及体积计算问题。通过实例计算分析可知,即使对不同形体,该结合方法也可正确识别液滴个数及每个液滴的粒子数,并且计算得到的液滴体积与其真实值相近。使用液滴识别及体积计算方法对横向射流雾化结果进行计算,计算结果表明,该方法可得到液体破碎后液滴群的粒径分布,可用于分析液体破碎的雾化程度和雾化效果。综上所述,本文的结合方法可以用于气液两相流中液滴识别及体积计算。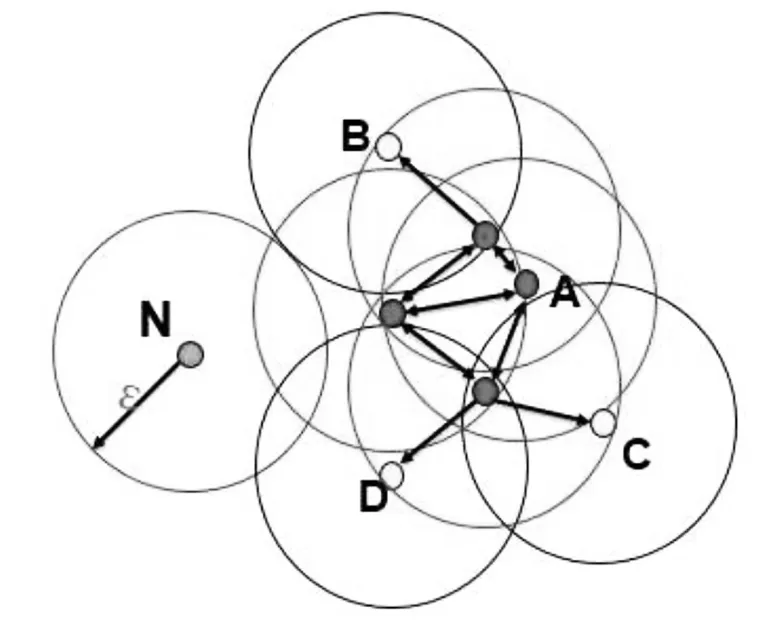
1.2 液滴体积计算
2 结果与分析
2.1 计算方法验证



2.2 横向射流雾化过程液滴识别及体积计算





3 结论
