利用韦尔伯福斯摆测量弹簧材料的泊松比
2023-11-03蓝亦青李滨旭张天旭张廷德王晓峰何春清刘海林
蓝亦青,李滨旭,张天旭,张廷德,龙 象,王晓峰,何春清,刘海林
(武汉大学 物理科学与技术学院,湖北 武汉 430072)
泊松比是指材料在单向受拉或受压时,横向正应变与轴向正应变的比值,也叫横向变形系数. 泊松比是反映材料横向变形的弹性常量. 测量固体材料泊松比的方法主要为直接测出微小的横向正应变与轴向正应变进而得到泊松比,包括声测法[1]、光测法[2]、电测法[3]等,上述方法的本质是使用传感器高精度测量微小形变. 如果将材料制成弹簧,通过分析弹簧的相关参量可以测得弹簧材料的泊松比. 由于弹簧材料泊松比的测定较为复杂,很难精确测量所需参量,因此在实验中,尝试通过临界条件将难以准确测量的弹簧材料参量转化为容易测量的韦尔伯福斯摆(简称韦氏摆)的运动参量[4].
1 实验装置
实验器材:弹簧(内直径d1=1.748 cm,外直径d2=1.912 cm)、韦氏摆摆锤、螺母若干(厚度d=0.300 cm,质量m0=0.700 g)、光学面包板、超声波距离传感器、光电门、PASCO-850通用接口、电磁铁、直流电源、PASCO Capstone软件.
1.1 韦氏摆
韦氏摆的摆锤以3D打印的PLA塑料为主体,与横向、纵向2个金属螺柱组装而成,如图1所示. 在竖直方向增减螺母的数量可以改变摆锤的质量,沿水平方向螺柱移动螺母可以改变摆锤的转动惯量,且可通过标尺读出螺母的位置,计算转动惯量.

图1 韦氏摆
1.2 超声波距离传感器
由PASCO-850通用接口连接超声波距离传感器和电脑. 利用Capstone程序,实时测出摆锤底端与传感器的距离,并且自动在Capstone界面中作出z-t曲线.
1.3 光电门
由PASCO-850通用接口连接光电门和电脑. 利用Capstone程序,实时测出横向螺柱经过光电门时的速度,并作出v-t曲线.
1.4 仪器组装与软件初始化
实验装置如图2所示.

图2 实验装置图
1)连接弹簧与摆锤,分别将2个螺母对称旋入水平螺柱的两端.
2)连接电磁铁与直流电源,断开开关.
3)通过PASCO-850通用接口连接光电门、超声波距离传感器与电脑.
4)打开Capstone软件,设置距离传感器为近距离模式,设置采样频率为50 Hz.
5)将韦氏摆、光电门、电磁铁固定到铁架台上,并将引导杆固定到电磁铁的铁架台旁边.
为了保证在运动过程中韦氏摆时刻满足运动方程,在摆放时应注意:
1)尽量由静止竖直释放韦氏摆. 将超声波距离传感器放置在电磁铁正下方.
2)放置光电门时,要尽量保证摆在平衡位置时水平螺柱、转轴与光电门共平面(光电门的指示灯常亮).
3)使用超声波传感器测距离时,传感器和摆的距离保持在40 cm左右.
2 实验原理
将韦氏摆的摆锤提升或者拉离平衡位置后,由静止释放,摆锤沿垂直线上下振荡,并且将竖直振动模式的部分动能缓慢地转换为水平扭转模式的动能,当水平的摆动幅度达到最大值后,这部分能量又由水平扭转模式转换回竖直振动模式. 如果将横向螺柱上的螺母调整到适当位置,使竖直振动模式和水平扭转模式的频率相同时,则动能在这2种振荡模式之间完全来回传递,即竖直方向的振动会出现停止的情况,反之,当竖直方向振子振动最强时其水平扭转运动也几乎停止.
2.1 韦氏摆的一般运动规律
对于一般的螺旋弹簧,弹簧在竖直伸缩过程中,可以利用劲度系数k表示弹簧的弹性势能.与此同时,弹簧下端会随着弹簧的拉伸而转动,弹簧下端偏离平衡位置的转角φ与弹簧伸长量z成正比[5],比例系数为C,即
φ(z)=Cz,
(1)
弹簧转动时产生扭矩,势能为
(2)
其中D为弹簧扭转系数.
对系统进行能量分析,拉格朗日函数[6]为
(3)

(4)
因DC2≪k,以下讨论与计算均令k′≈k.通解为
z=A1eiω1t+A2e-iω1t+A3eiω2t+A4e-iω2t,
(5)
其中
(6)
(7)
(8)
(9)
2.2 韦氏摆的共振机理
(10)
(11)
此时水平和竖直方向的振动都可以降为0,出现明显的能量转换现象,或者说“完全”共振现象,即水平扭转运动最强时竖直振动几乎停止;反之,当竖直方向振子振动最强时其水平扭转运动几乎停止.
接下来分析耦合运动的周期.实验共有3个周期量,分别为竖直方向小幅振动周期、水平方向小幅转动周期以及二者都表现的拍周期[7].拍的周期为
(12)
式(6)~(7)变换为
(13)
实验中唯一改变的量是转动惯量,因此将(ω1-ω2)2看作转动惯量I的单变量函数,寻找极值条件.
(14)
进而得到
(15)
此时
拍周期T达到最大值,同时摆也达到完全共振的状态.由式(6)、式(7)以及式(3),利用Matlab进行数值计算,可以得到给定的摆锤振子具有不同转动惯量情况时拍周期的变化曲线,如图3所示.
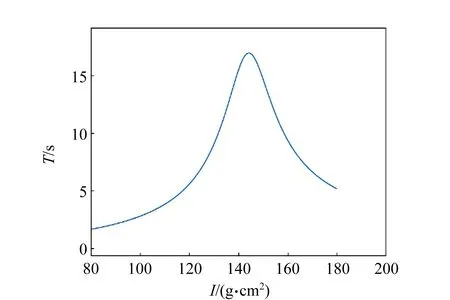
图3 Matlab计算的T-I关系
在振子的转动惯量由80.000 g·cm2增加到约143.000 g·cm2的过程中,拍周期T增加并达到最大值,当转动惯量继续增大则T减小,模拟结果与理论预测一致.
2.3 测量弹簧材料的泊松比
对于一般的螺旋弹簧,其参量满足[8-9]
D=kR2(1+σcos2α),
(16)
其中,k为弹簧的劲度系数,R为弹簧的半径,σ为金属的泊松比,α为弹簧的螺旋角.
由于实验使用的弹簧为拉簧,即使在悬挂伸长后,α≪1,故cos2α≈1,式(16)可以变为
D=kR2(1+σ).
(17)
因此,当拍周期达到最大时即摆达到完全共振时,将式(17)代入式(15),得到金属的泊松比为
(18)
其中,I为系统的有效转动惯量,由平行轴定理可以得到
(19)
其中r为螺母距离转轴的位置.等式右边的第2项为螺母对中心轴的额外转动惯量.
调节摆的转动惯量并释放摆,观察摆接近完全共振的现象,之后在其对应的螺母位置处附近选若干点,改变位置进行实验测量,得出拍周期最大时对应的转动惯量,利用式(18)即可测出弹簧材料的泊松比.
2.4 韦氏摆的阻尼研究
实际实验存在阻尼,因此可以在方程(4)中加入阻尼项,
(20)
其中,β1和β2为韦氏摆在竖直、水平方向运动的阻尼系数.
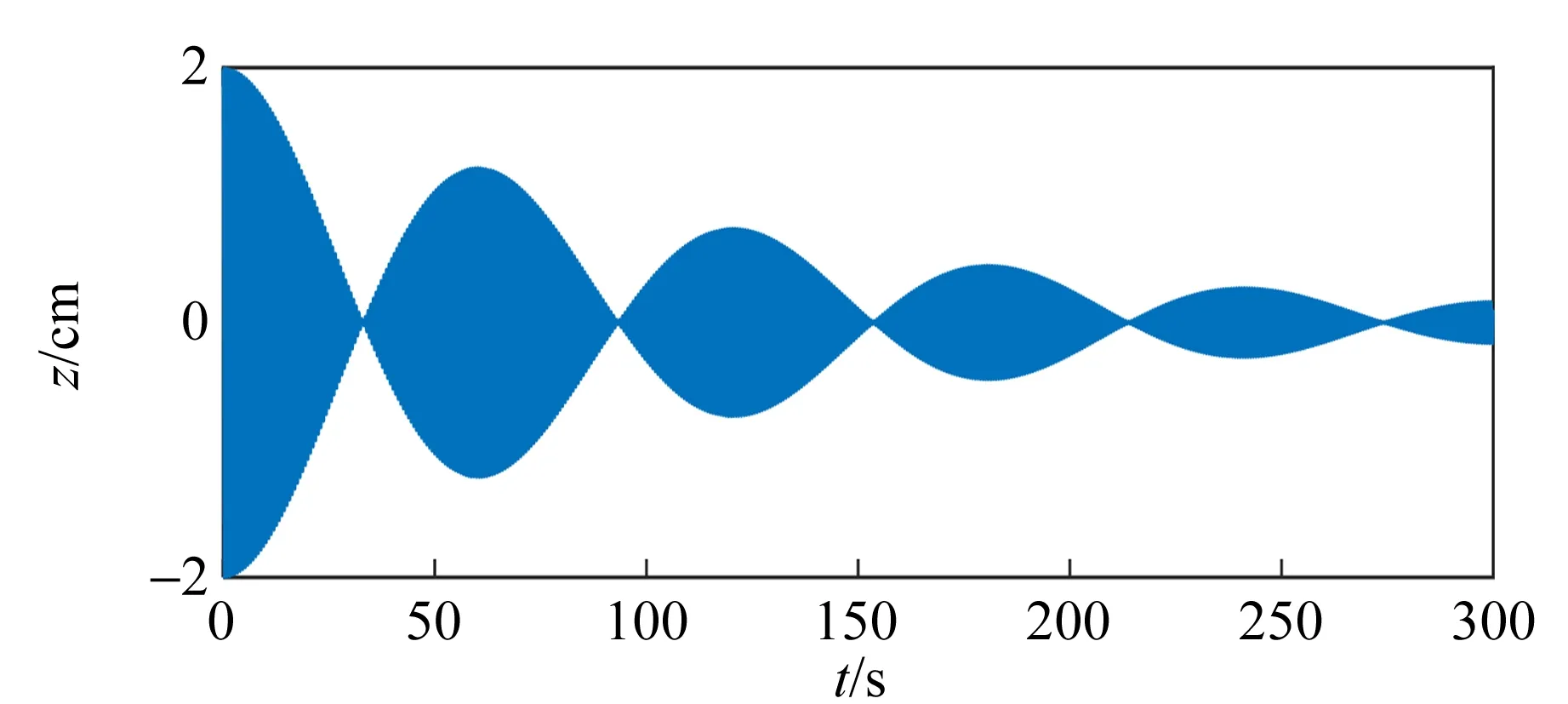
无法求得方程(20)的解析解,使用Matlab对方程进行数值求解,可以得到有、无阻尼时,摆锤高度随时间的变化规律,如图4所示.
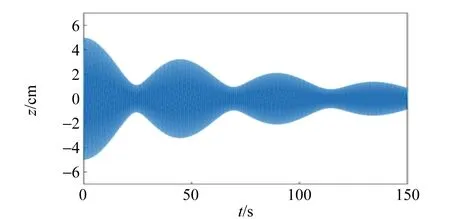
(a)有阻尼
由图4可知:当存在阻尼时摆振子的振幅随时间衰减,但拍周期与是否存在阻尼无关.
3 实验方法及结果
3.1 初步调节韦氏摆并观察摆的耦合特点
1)将韦氏摆静置,上移电磁铁使其紧贴摆下端但不与摆相碰. 闭合电路开关,电磁铁吸住韦氏摆,利用引导柱下拉电磁铁至适当位置,调整韦氏摆的摆角位置,使其与平衡位置时的摆角方向相同,撤去引导柱.
2)打开距离传感器,断开电磁铁开关,在释放弹簧后,固定转动电磁铁(防止电磁铁影响距离传感器的测量结果). 观察韦氏摆的运动模式,可以看到摆锤逐渐出现水平转动现象.
3)固定1对螺母,对称调节另1对螺母的位置,重复步骤1)和2),直至竖直方向振动出现基本停止.
4)再次通过电脑记录数据,实时观测韦氏摆竖直方向振动距离随时间的变化曲线,以及水平旋转速度随时间的变化曲线. 观察竖直、水平方向振动的拍现象.
将螺母与转轴的距离x1和x2作为可调参量,改变摆体的转动惯量,见表1. 不改变其他参量,系统总转动惯量在141.000~147.000 g·cm2的区间内逐步改变,并测量摆上2个固定点的水平转动线速度和竖直位置,如图5所示. 容易观察到如上所述“共振”,水平转动和竖直振动都出现了拍现象. 如图6所示,在有阻尼情形韦氏摆竖直位置随时间变化的Matlab模拟结果和实验结果一致.

表1 转动惯量I、水平转动停止时间间隔Ti及拍周期T
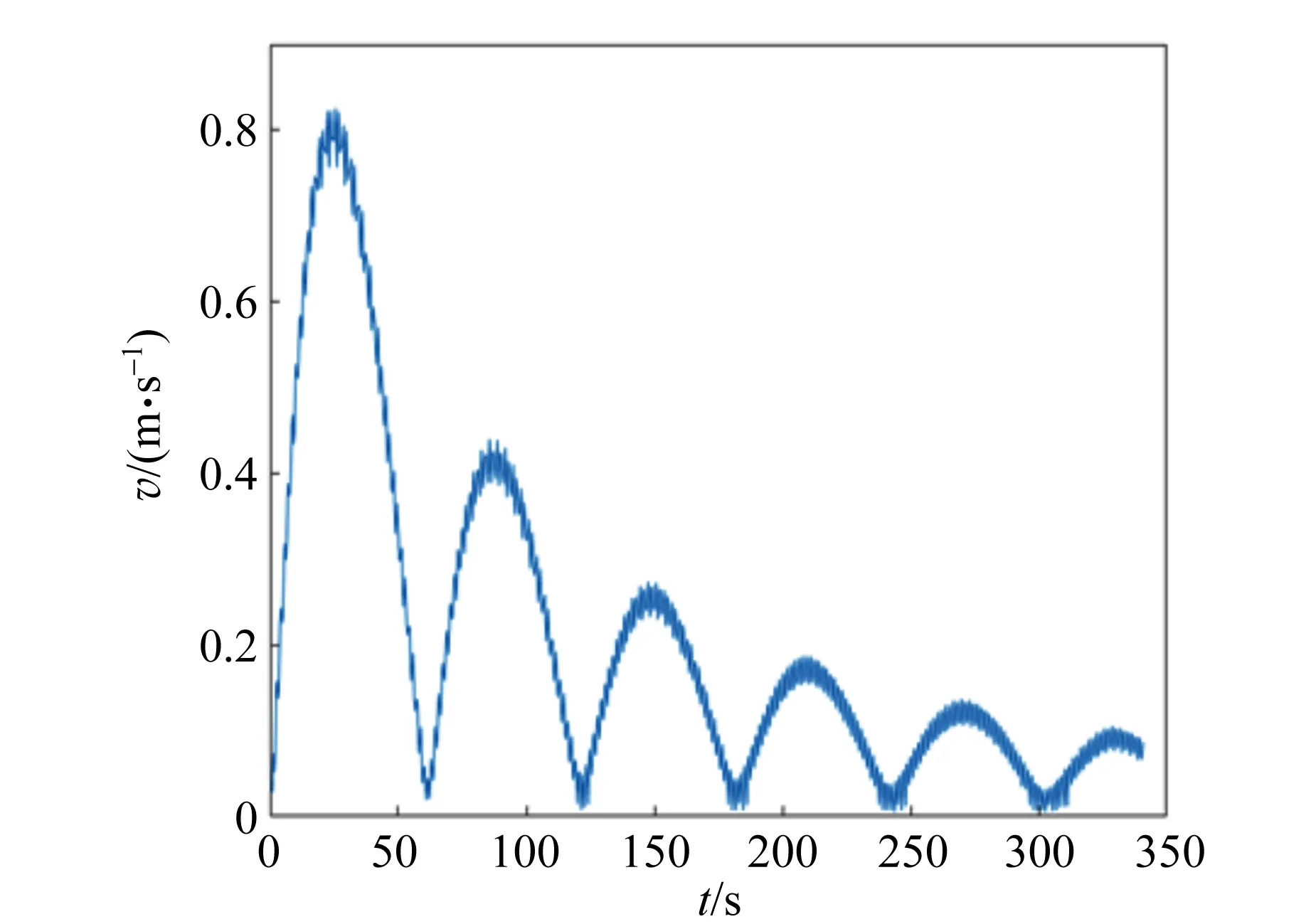
(a)水平线速度
(a)模拟
3.2 微调韦氏摆并测定弹簧材料的泊松比
1)在粗调韦氏摆的基础上,对称改变两螺母位置并记录外侧位置,使螺母位置在共振位置附近取值,并进行3.1的步骤1)和2),根据数据得到连续5个拍的开始、结束时间T1,T2,T3,T4,T5和T6.
2)通过微调自制韦氏摆螺母位置改变其转动惯量.由式(19)计算螺母处于不同位置时的转动惯量I,实验上获得不同转动惯量韦氏摆对应的共振曲线.从共振曲线中顺序读出第i个最小位移出现的时刻Ti,直线拟合时间Ti与顺序i之间的关系,即可得到不同转动惯量对应的拍周期T.最后,作出拍周期T与转动惯量I的关系曲线,如图7所示.
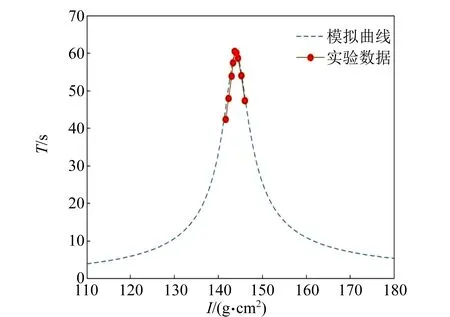
图7 韦氏摆的T-I曲线
由拟合结果易知,当拍周期T达到最大时,对应的转动惯量I=143.850 g·cm2. 利用式(18)计算金属弹簧的泊松比σ=0.274 5,不确定度uσ=0.01,则σ=0.27±0.01.
另外,当弹簧参量取值为C=0.85 m-1,D=1.744×10-3N·m时,拍周期随转动惯量变化的数值模拟与实验结果一致(见图7). 由T-I模拟曲线得出拍周期T达到最大时,对应的转动惯量I=143.900 g·cm2,计算结果与实验测量一致.
4 结束语
耦合现象是力学中的独特现象,展现了结构力学的内在机理. 本次实验,实验仪器简单,利用摆锤可以灵活地调节转动惯量,方便实验操作. 由于其独特的耦合振动现象,在了解单个方向的运动状态后可以得到整体系统的拍周期,在实验仪器缺失的情况下,可以测量单方向运动达到实验目的. 该实验可以作为普通物理实验,不仅能够观察到耦合振动现象,又能借助韦氏摆巧妙设计泊松比的力学测量方法.
