硬岩隧道掘进多臂协同钻孔技术研究
2023-10-21崔孟豪姬会福惠延波张中伟崔玉明
崔孟豪 ,姬会福 ,惠延波 ,张中伟 ,崔玉明 ,宋 丹
(1.河南工业大学 机电工程学院, 河南 郑州 450001;2.江苏师范大学 机电工程学院, 江苏 徐州 221116;3.中铁工程装备集团有限公司专用设备研究院, 河南 郑州 450001)
0 引 言
目前,铁路、公路隧道、煤矿巷道等地下工程施工方法主要有钻爆法[1]、部分断面掘进机法[2]、全断面硬岩隧道掘进机法(TBM)[3-4]。部分断面掘进机法主要用于煤矿巷道等小型地下工程,且当岩石硬度超过100 MPa 时,无法有效掘进[5]。TBM 施工前准备周期较长,掘进设备依据施工地质条件专门定制,设备制造价格昂贵[6-7]。钻爆法对不同地质条件及施工环境均具有较好的适应性和通用性,且当待掘进隧道相对较短时,采用掘进机施工时经济成本高,故而钻爆法被广泛应用于隧道地下工程中[8-9]。然而,传统钻爆法需要储存和填充炸药,存在较高的安全隐患,爆破后形成的隧道断面易出现超欠挖,且施工掘进效率低,因此国内外学者对无炮掘进方法进行了研究,提出了水射流、粒子冲击破岩、钻涨法等新型破岩方式[10-13],当开挖岩石硬度大于100 MPa 的隧道时,水射流辅助机械破岩时需要上百兆帕甚至更高的压力,对设备要求及使用环境要求较高,且需要配备专用水泵用来供水,对设备密封性要求高、能耗利用率低[14]。钻涨法[15]通过凿岩台车在隧道断面预先钻孔,然后利用涨裂器作用于所钻孔位,使岩石沿自由面涨裂,所形成的隧道断面具有质量好、不易超欠挖、安全性好等优点。
凿岩台车作为钻涨法破岩的关键机械设备之一,通过凿岩台车钻臂在隧道掘进工作面钻孔,而后采用涨裂器涨裂岩石断面。三臂凿岩台车由于施工效率高、工作范围大等优点,被广泛应用于隧道涨裂破岩。但是在钻孔过程中,仍普遍采用人工经验确定钻孔顺序,导致钻孔时间长、孔位定位精度差、容易出现交叉路径等问题。因此,开展多臂协同布孔的研究,以解决上述问题。国内外现有研究多以单臂和两臂凿岩台车为主。ANDERSSON[16]以Atlas Copco 公司双臂凿岩台车为对象,对隧道掘进工作面80 个孔位进行钻孔试验,通过将掘进工作面划分为2 个区域,每个区域内允许1 个钻臂工作,得到双臂的钻孔路径。CUI 等[17]以六自由度单臂凿岩台车样机为对象,对钻臂进行运动学分析得到钻孔定位精度,以末端移动距离最小和关节转角最小作为优化目标,采用蚁群算法得到凿岩台车的钻孔路径,通过试验表明以关节转角之和最小作为路径优化目标,施工时间最短。吴万荣等[18]针对三臂凿岩台车钻孔路径进行研究,依据施工经验将隧道掌子面粗略划分工作区域,以末端移动距离为优化目标,仅以90孔位断面为对象,采用自适应遗传算法得到三臂凿岩台车钻孔路径,但对钻臂工作区域划分没有研究。TANG 等[19]对单臂凿岩台车钻孔路径进行研究,以钻臂末端行驶距离作为Hopfield Network 算法的能量函数,采用Hopfield network 方法得到单臂凿岩台车钻孔顺序。何清华等[20]以各关节运动方向变化趋势为基础,采用遗传算法得到单臂凿岩台车的孔序路径,进一步利用单臂凿岩机器人钻孔路径进行变化得到双臂凿岩机器人钻孔路径。可以看出,现有进行凿岩台车孔序规划的主要方法有遗传算法、蚁群算法等智能优化算法[21-23],但这些算法普遍存在寻找最优路径能力不足的问题,且以三臂凿岩台车为对象进行孔序规划及各钻臂按照工作空间划分协同作业研究较少,钻孔顺序优化目标较为单一,多臂协同作业中容易出现的钻臂碰撞问题也没有涉及。
综上,以三臂凿岩台车多臂协同钻孔为目标,提出一种合理的钻孔路径,实现钻臂协同无碰撞钻孔作业。首先基于D-H 法建立三臂凿岩台车钻臂运动学模型,利用蒙特卡洛法获得三臂凿岩台车有效工作空间,以钻臂之间干涉碰撞及钻孔任务数均衡为判断准则合理划分各钻臂工作空间,采用RBF 神经网络算法实现钻孔定位;其次分别以钻臂运动过程中末端移动距离最短和各关节变量最小作为优化目标,提出一种基于改进遗传算法的三臂凿岩台车孔序规划方法,并依据两种孔序方案和所划分工作空间对多钻臂协同无碰撞钻孔进行仿真模拟验证。
1 运动学及工作空间分析
三臂凿岩台车结构如图1 所示,其3 个钻臂结构相同,当凿岩台车钻孔施工时,钻臂末端需要垂直于隧道掌子面所布孔位进行钻孔作业。运动学研究是三臂凿岩台车钻孔定位的基础,基于D-H 法推导出钻臂运动学方程,利用蒙特卡洛法获得钻臂工作空间,搭建RBF 神经网络算法求解钻臂逆运动学,实现三臂凿岩台车钻孔定位。

图1 三臂凿岩台车Fig.1 Three-boom rock drilling jumbo
1.1 三臂凿岩台车钻臂运动学模型
所研究的三臂凿岩台车3 个钻臂结构相同,均具有7 个自由度,包括5 个转动关节和2 个移动关节,驱动力由液压系统提供,其钻臂结构如图2所示。

图2 七自由度钻臂结构模型Fig.2 Structure model of drill boom with 7-DOF
根据D-H 法[24]建立三臂凿岩台车钻臂各关节坐标系,将基坐标系建立在基座上,如图3 所示。
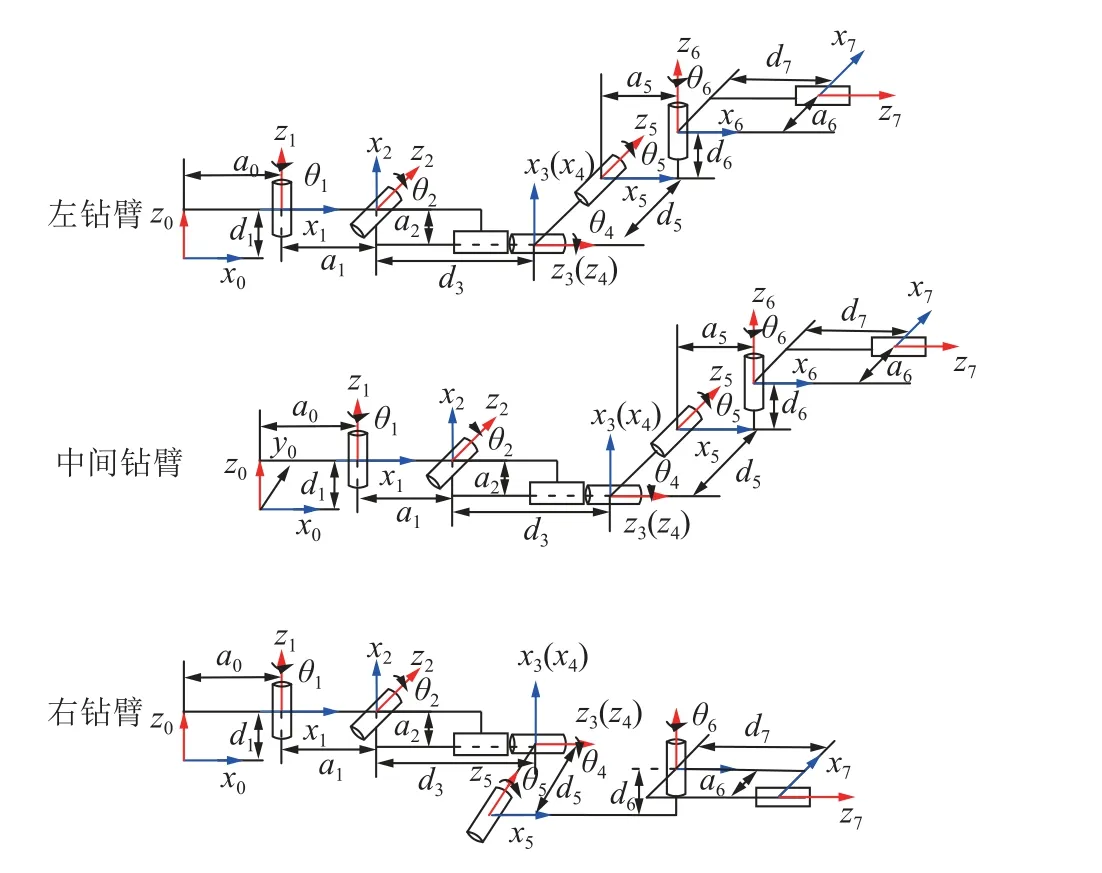
图3 三臂凿岩台车钻臂关节坐标系Fig.3 Boom joint coordinate system of three-boom rock drilling jumbo
依据图3 及钻臂结构参数,且所研究3 个钻臂结构相同,以中间钻臂为例建立钻臂D-H 参数,见表1。
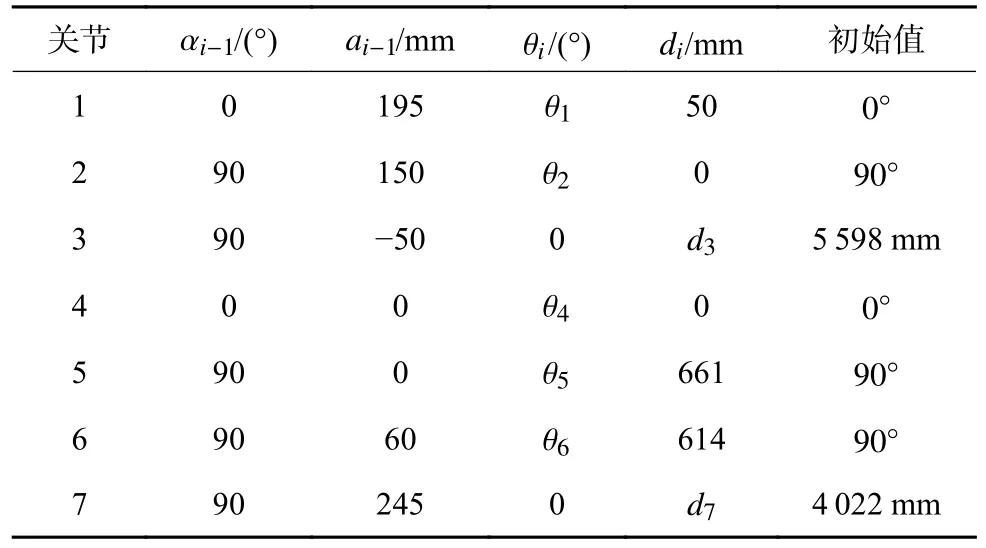
表1 中间钻臂D-H 参数Table 1 D-H parameters of intermediate boom

表2 钻臂各关节变量范围Table 2 Variable range of each joint of the drill boom
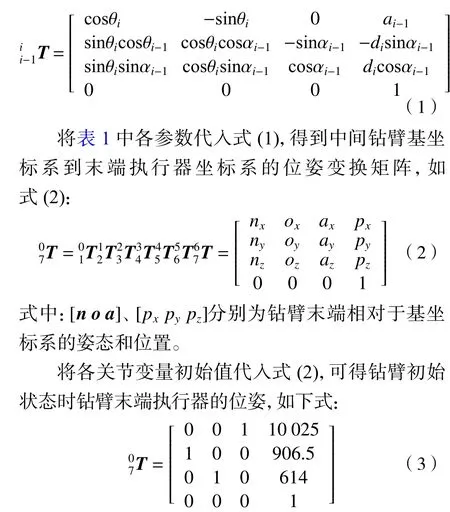
根据D-H 参数表及关节坐标系,得到中间钻臂任意相邻关节之间变换矩阵,如式(1):
1.2 三臂凿岩台车钻臂工作空间
三臂凿岩台车施工前,首先需要求出其工作空间,且需要考虑隧道掘进工作面所布孔位的姿态,其工作空间需要包含所有待钻孔位,该工作空间称为三臂凿岩台车的有效工作空间,而钻臂是三臂凿岩台车钻孔的关键部件,其有效工作空间即为3 个钻臂末端执行器所能覆盖的空间。本文基于蒙特卡洛法求解三臂凿岩台车有效工作空间,通过MATLAB 生成伪随机数,函数调用如式(4)所示:

根据式(4)获得钻臂运动样本数据,将其代入钻臂运动学矩阵,即式(2),可得到钻臂末端执行器在笛卡尔坐标系下的位置坐标 (px,py,pz),该坐标的集合即为钻臂工作空间。
所研究三臂凿岩台车结构,中间钻臂的底座固定在凿岩台车车体上,而左右2 个钻臂通过鹰式臂结构与凿岩台车车体相连接,鹰式臂结构原理如图4所示。a为810 mm,b为1 750 mm,收起状态下(对应钻臂的零位) θ 为 25°, θ最大为145°,左右钻臂的安装底座在YOZ平面内运动。
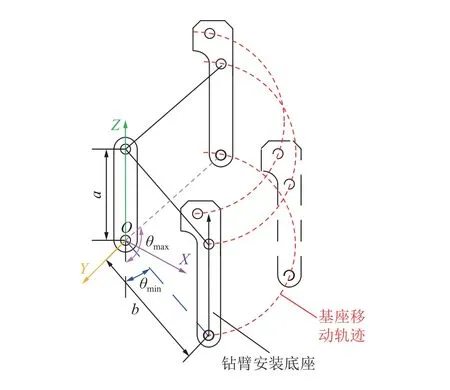
图4 鹰式臂活动底座运动简图Fig.4 Schematic diagram of the movement of the eagle boom movable base
通过图4 可知鹰式臂活动底座运行轨迹呈圆弧形,仅在YOZ平面内运动,以三臂凿岩台车钻臂底座运动轨迹圆心作为基坐标系原点,根据D-H 法建立左右钻臂连杆坐标系,则左右2 个钻臂钻杆末端位置矢量为
故三臂凿岩台车工作空间为3 个钻臂末端位置矢量的集合,通过Matlab 将3 个钻臂末端执行器的位置坐标绘制成三维散点图,即为三臂凿岩台车的有效工作空间,如图5 所示。

图5 三臂凿岩台车有效工作空间Fig.5 Effective working space of three-boom rock drilling jumbo
其中图5a 为三臂凿岩台车的有效工作空间,图5b为各钻臂所能到达的工作区域,从中可以发现三臂凿岩台车有效工作空间可覆盖高15 m、宽17 m 隧道掌子面,而3 个钻臂的工作空间有重叠,在重叠工作空间内,3 个钻臂协同钻孔时钻臂之间可能发生干涉碰撞,故为避免钻孔施工时钻臂之间发生干涉碰撞,同时考虑工作空间划分不合理引起3 个钻臂协同作业效果差,以及均衡各钻臂钻孔任务数,因此结合文献[25],将隧道断面划分为3 个区域,每个区域内只有一个钻臂工作,如图6 所示,隧道掌子面共布置188 个孔位,所布孔位均为直孔,每个孔位的位姿均已知,且所布孔位关于隧道中线左右对称,左右钻臂工作空间关于隧道轴线对称,中间钻臂工作空间所布孔位关于隧道中线对称,其中左钻臂工作区域内钻孔任务数量为64;中间钻臂工作区域内钻孔任务数量为63;右钻臂工作区域内钻孔任务数量为61。

图6 工作区域划分Fig.6 Work area division
1.3 钻孔定位分析
在钻孔作业时,首先需要实现钻孔精确定位,隧道掌子面所布孔位位姿均已知,根据孔位位姿反解求出钻臂对应的各关节变量值,该过程即为钻臂逆运动学求解过程。采用RBF 神经网络算法求解三臂凿岩台车钻臂逆运动学[26]。
钻臂逆运动学求解是非线性的过程,而RBF 神经网络可将低维空间非线性不可分问题转换成高维空间线性可分问题,所搭建RBF 神经网络有3 层:输入层、隐藏层、输出层。
RBF 神经网络的隐藏层使用高斯函数作为核函数,表达式如下:

其中,P为输入样本数据;T为输出样本数据;spread为径向基函数的分布系数。通过多次仿真,确定spread=1。
采用RBF 神经网络对钻臂进行钻孔定位前,需要对神经网络进行训练,使所设计的网络结构预测精度能够满足要求。
对神经网路训练时,首先需要获取样本数据。本文采用伪随机数的方式,在钻臂各关节变量范围内,随机生产一定数量的各关节变量值,将生成的关节变量值代入式(2),将其作为RBF 训练样本的输入层。但该方法所得输入样本中有16 个数据,而其中只有12 个有效数据表示钻臂末端的姿态和位置,故为提高预测速度,并保证各数据之间相互正交,采用RPY 欧拉变换对输入样本进行处理,变换后输入样本如下:
式中, α ,β,λ 为钻臂末端姿态矢量;px,py,pz为钻臂末端位置矢量。
RPY 角欧拉变换方式如式(9)所示:

为避免所生成的样本数据中存在奇异值,采用最大-最小标准化的归一化方法对输入样本数据进行归一化处理,方法如下:
式中:Xmax为样本数据中最大值;Xmin为样本数据中最小值。
由此,所设计的求解钻臂逆运动学的RBF 神经网络结构如图7 所示。
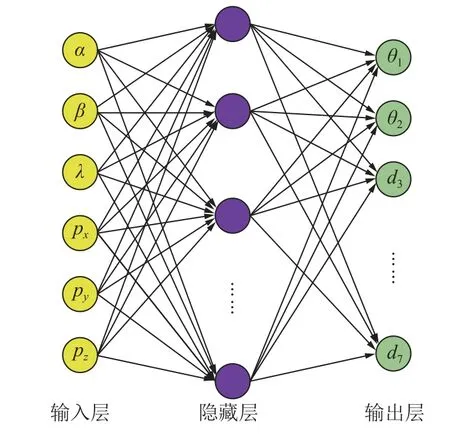
图7 RBF 神经网络结构Fig.7 RBF neural network structure
对RBF 神经网络进行训练使其达到所需预测精度,随后将隧道掌子面所布孔位的位姿作为输入层,输出层仍为钻臂各关节变量,即式(10),由此采用RBF 神经网络对钻臂钻孔进行定位预测。
2 基于改进遗传算法的孔序优化
为提高三臂凿岩台车的钻孔施工工作效率,节约施工成本,需对每个钻臂的钻孔顺序进行合理规划。
2.1 孔序规划数学模型
钻孔时,为避免交叉路径,每个孔位只经历一次,考虑钻臂末端移动行驶距离最短及钻臂运动过程中能耗最低。基于此,以钻臂末端行驶距离最短和钻臂各关节变量最小为优化目标建立孔序规划数学模型。
式中:R为钻臂运动过程中各关节变量总和,rad; θ为钻臂关节变量,rad。
以前文188 孔位隧道断面为例,以钻臂运动过程中末端移动距离最短和各关节变量之和最小作为优化目标,提出一种改进遗传算法对三臂凿岩台车进行孔序规划。算法设计中,选择策略采用锦标赛的方法,采用一种基于贪心思想的启发式交叉方法对所选个体进行交叉操作,变异策略融合交换、逆转、插入3 种方式,新种群进化过程中加入模拟退火和基于大规模邻域搜索的局部搜索策略,以提高算法的局部寻优能力,避免在求解过程中陷入局部最优,同时提高算法整体搜索能力。基于改进遗传算法的三臂凿岩台车孔序规划流程如图8 所示。
2.2 编码方案选择
孔序规划问题所求解的是遍历每个钻臂对应的所有孔位,找到一条最优钻孔路径,因此把隧道断面所有孔位的编号作为问题参数进行编码,采用常规不重复整数的方式对每个孔位进行染色体编码[27],故每一个种群个体的编码方式如下:
2.3 适应度函数设计
适应度函数是评价种群个体优劣的重要指标,个体适应度值越高其存活下去的概率就越大。适应度函数设计为2 个孔位 (i,j)之间距离或各关节变量之和的倒数,如式(16):
2.4 遗传算法改进策略
2.4.1 交叉策略
交叉算子对种群的进化速度和后代质量有重要影响,结合文献[28]引入一种基于贪心思想的启发式交叉策略,该交叉策略能够提升算法的全局搜索效率,获得较优的进化后代,同时提升算法寻优速度。本文交叉过程生成两个子代,生成子代C1 操作过程如图9 所示,而生成子代C2 时寻找起始孔位左侧的孔并比较孔位之间的距离大小,其余操作同生成子代C1 的过程。
2.4.2 新种群进化策略
局部搜索策略采用大规模邻域搜索算法,通过交替使用破坏解和修复解的方式逐步改善当前所得钻孔路径,找出个体在当前环境下局部最优解,改善种群总体性能,提升算法的局部寻优能力,具体操作过程如图10 所示。

图10 局部搜索Fig.10 Local search
模拟退火策略核心思想是在对种群搜索过程中,选择合适的概率接受比当前最优解较差的解,然后采用所选解对种群进行搜索,从而使算法达到避免陷入局部最优的目的。
3 仿真模拟分析
3.1 钻孔定位仿真模拟分析
采用RBF 神经网络算法获得钻臂到达对应孔位时各关节变量值,将所得变量值代入钻臂正运动学矩阵式(2),计算出钻臂末端位置,将该位置坐标值与隧道掌子面孔位理论坐标值进行对比,获得3 个钻臂孔位定位误差,如图11 所示。由于孔位之间误差差距较大,部分孔位的定位误差较小,在图中不明显。从图11 中可知,3 个钻臂的水平方向定位误差高于竖直方向误差,由图11a 可知,中间钻臂X方向最大误差为2.59 mm,Y方向最大误差2.34 mm;由图11b可知,左钻臂X方向最大定位误差为3 mm,Y方向最大误差为1.73 mm;由图11c 可知,右钻臂X方向最大定位误差为2.63 mm,Y方向最大误差为0.49 mm。因此,3 个钻臂的钻孔定位精度能够满足三臂凿岩台车钻孔施工要求。3 个钻臂中钻孔定位误差最大为3 mm,误差在3%以内,该误差能够避免由于钻孔定位不准确引起的隧道超欠挖问题,故能够满足三臂凿岩台车钻孔施工要求。

模拟退火策略伪代码如下:
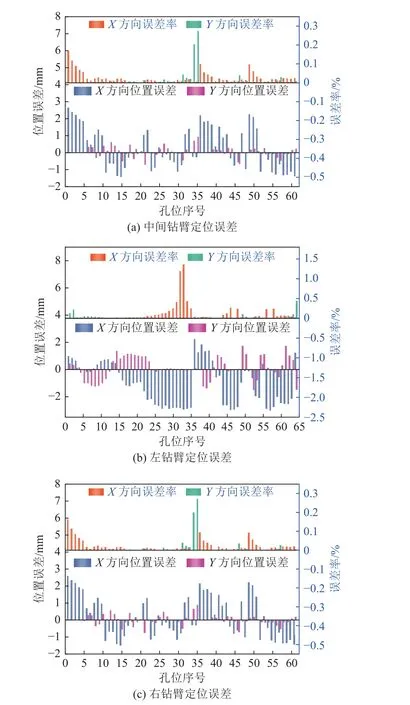
图11 三臂凿岩台车钻孔定位误差Fig.11 Drilling positioning error of the three-boom rock drilling jumbo
为验证所提出钻孔定位应用于三臂凿岩台车的可行性,由于3 个钻臂结构完全相同,因此为更加接近钻臂实际钻孔作业环境,以中间钻臂为例,基于ADAMS-AMESim 对钻孔定位进行虚拟样机联合仿真。限于篇幅,取部分孔位进行验证。钻臂定位虚拟样机联合仿真如图12 所示。

图12 虚拟联合仿真模型Fig.12 Virtual co-simulation model
图12 所示为钻臂钻孔定位联合仿真模型,由于钻臂移动补偿关节主要作用根据实际钻孔需求在其轴线上进行移动,故在仿真时不考虑移动补偿关节。将钻臂模型导入ADAMS,根据逆解结果及钻臂施工特点添加约束和驱动,在AMESim 中搭建钻臂各关节液压系统,将钻臂ADAMS 模型通过FMU 模块导入AMESim,实现机液模型之间数据传递,由此进行联合仿真试验。
通过在ADAMS 钻臂模型末端建立Mark 点,测量其相对于基坐标系的位置坐标,仿真结果见表3。

表3 联合仿真结果对比Table 3 Comparison of co-simulation results
通过表3 可以看出联合仿真所得孔位与RBF 预测孔位之间存在误差,这是由于ADAMS 为钻臂实物模拟仿真,仿真环境中添加有重力等因素,且ADAMS-AMESim 联合仿真时,数据之间交换传递也会造成一定误差,从而使得仿真结果与理论求解值存在一定误差,但钻臂末端依然垂直于隧道断面,且此误差在钻孔施工允许的范围内,由此可知RBF神经网络算法可以实现三臂凿岩台车钻孔精确定位。
3.2 孔序规划仿真模拟分析
以钻臂末端行驶距离最短和钻臂各关节变量之和最小作为优化目标,采用改进遗传算法(Improved Genetic Algorithm, IGA)、自适应遗传算法(Adaptive Genetic Algorithm , AGA)、蚁 群 优 化 算 法(Ant Colony Optimization Algorithm, ACOA)分别对三臂凿岩台车进行孔序优化分析,根据所求解问题,经过5 次仿真模拟选取合适的算法参数,改进遗传算法与自适应遗传算法的主要参数设置见表4,蚁群优化算法主要参数如下:

表4 算法主要参数设置Table 4 Algorithm main parameter settings
其中改进遗传算法中交换变异的概率为pSwap=0.2,逆转变异的概率为pReversion=0.5;插入变异概率为pInsertion=1-pSwap-pRever-pReversion,冷却因子为α=0.99。对3 种算法进行5 次仿真试验,选取每种算法所得最优的孔序结果。
1)以钻臂末端行驶距离最短作为优化目标。如图13 所示为三臂凿岩台车以钻臂末端行驶距离最短所得孔序规划结果。从图13a 可知,采用改进遗传算法进行孔序规划时,3 个钻臂的钻孔路径均未出现交叉的情况;采用蚁群优化算法时,由图13b 中左、右钻臂均出现了1 处路径交叉的情况,中间钻臂出现了2 处交叉路径;采用自适应遗传算法时,由图13c 可知左右两钻臂均出现1 处交叉路径。由于隧道掌子面所布孔位关于隧道中线左右对称,故其最优钻孔顺序趋势也应一致。从图13a 可以发现除左钻臂钻孔任务数比右钻臂多1 个之外,左右钻臂所得钻孔路径趋势一致,中间钻臂工作空间内,隧道中线左右两侧钻孔顺序趋势一致,所用改进遗传算法所得钻孔最优路径符合要求,同时采用改进遗传算法进行孔序规划时,能够有效避免交叉路径,得到钻孔路径的解较优,更符合三臂凿岩台车隧道掘进的施工要求。
综合对比3 种算法的孔序规划仿真结果,不同算法所得钻臂末端行驶对比如图14 所示,与蚁群优化算法和自适应遗传算法相比,3 个钻臂末端行驶的总距离分别减少了5.39 m 和10.84 m。其中,与蚁群优化算法相比,采用改进遗传算法时,所得左钻臂、中间钻臂、右钻臂末端行驶距离分别从48.36、66.79、45.88 m 减小为46.94、64.09、44.61 m,减小了3.03%、4.21%、2.85%;与自适应遗传算法相比,采用改进遗传算法时,所得左钻臂、中间钻臂、右钻臂末端行驶距离分别从50.29、68.57、47.62 m 减小为46.94、64.09、44.61 m,分别减小了7.14%、6.99%、6.75%。由此可知,与常规的路径规划方法相比,采用提出的改进遗传算法进行孔序规划能够找到一条较优的钻孔路径,在避免交叉路径和寻找最短路径方面具有显著优势。
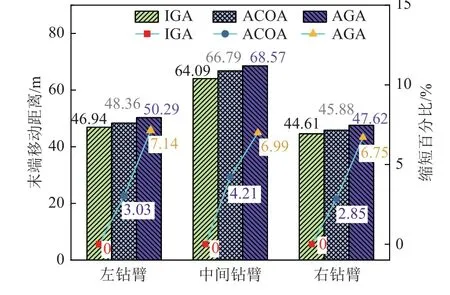
图14 不同算法下钻臂末端行驶距离变化Fig.14 Comparison of end driving distances of different algorithms
2)以钻臂各关节变量之和最小作为优化目标。如图15 所示为钻臂各关节变量之和最小作为优化目标时3 种算法所得孔序规划结果,各关节变量最小即钻臂运动过程中所消耗能耗最小。从图15a 可知,采用改进遗传算法进行孔序规划时,3 个钻臂的钻孔路径均未出现交叉情况;采用蚁群优化算法时,由图15b 可知,左钻臂出现一处交叉路径,右钻臂处出现2 处交叉路径,中间钻臂出现了4 处交叉路径;采用自适应遗传算法时,由图15c 可知,3 个钻臂的钻孔路径规划中均出现一处交叉路径。与以末端移动行驶距离作为优化目标所得钻孔路径不同的是,基于关节变量之和最小作为优化目标所得的钻孔路径趋势没有呈现左右对称现象,这是由于钻臂到达每个孔位时对应的关节变量不同。采用改进遗传算法,以能耗最小即各关节变量之和最小作为优化目标进行孔序规划时,同样能够有效避免交叉路径,避免重复钻孔的发生。
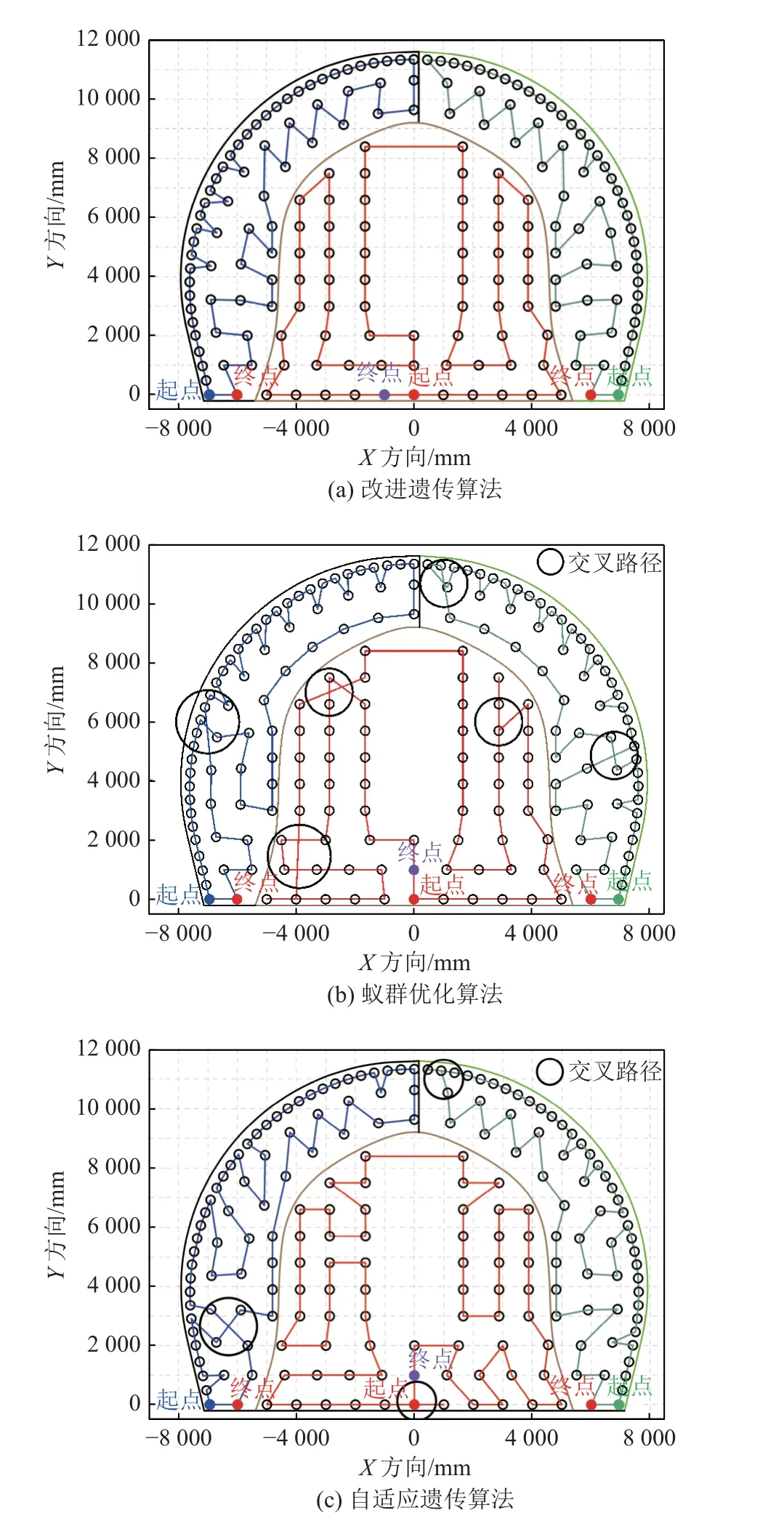
图15 基于关节变量最小孔序规划结果Fig.15 Minimum hole order planning results based on joint variables
进一步,对3 种算法孔序规划结果进行定量分析,结果如图16 所示,与蚁群优化算法和自适应遗传算法相比,3 个钻臂各关节变量的总和分别减少了2.76 rad 和5.34 rad。与蚁群优化算法相比,采用改进遗传算法时,所得左钻臂、中间钻臂、右钻臂各关节变量之和分别从12.86、21.71、11.58 rad 减小为12.13、20.24、11.05 rad,减少百分比为6.33%、7.26%、4.81%;与自适应遗传算法相比,采用改进遗传算法时,所得左钻臂、中间钻臂、右钻臂各关节变量之和分别从12.86、23.58、12.32 rad 减小为12.13、20.24、11.05 rad,减少了5.98%、16.49%、11.49%。
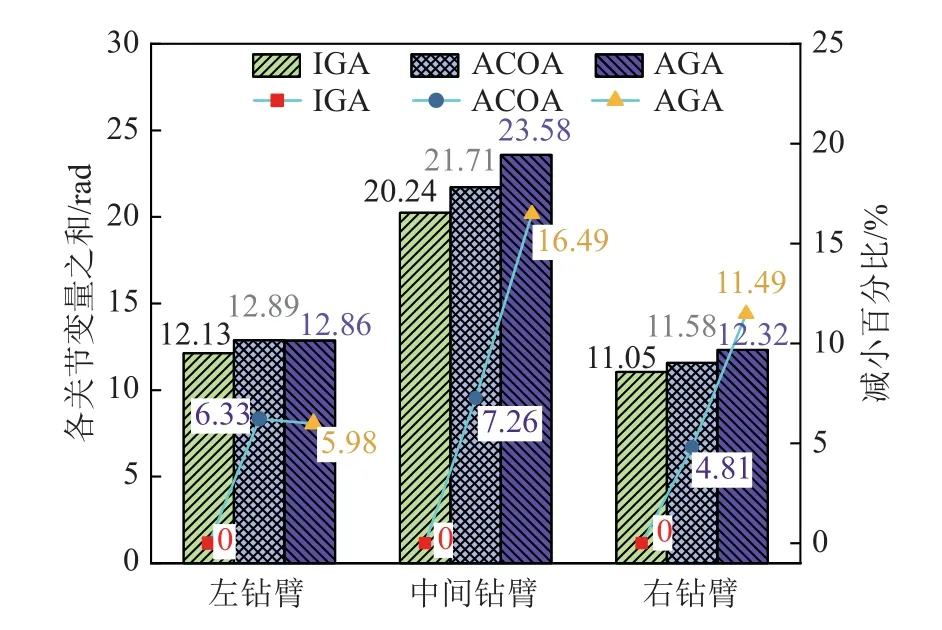
图16 不同算法下钻臂关节变量最小变化Fig.16 Minimum comparison of drill boom joint variables in different algorithms
由此可知,以钻臂运动过程中能耗最小作为优化目标时,采用改进遗传算法确定钻孔路径优于自适应遗传算法和蚁群优化算法。
3.3 多钻臂协同钻孔仿真模拟
三臂凿岩台车3 个钻臂钻臂协同无碰撞钻孔是其钻孔作业效率高的重要原因,由各钻臂的工作空间可知钻臂之间碰撞干涉仅可能发生在中间钻臂与左右钻臂之间,基于前文所得各钻臂工作空间和2种不同优化目标所得孔序规划方案,分别对中间钻臂与左右钻臂进行协同钻孔碰撞干涉检测仿真验证,以MATLAB Robotic Toolbox 为平台进行仿真。仿真时假设钻臂钻每个孔的时间相同,2 种孔序规划方案所得中间钻臂与左右钻臂之间最短距离如图17、18 所示。
通过图17、图18 可知,以钻臂末端移动距离最短所得钻孔顺序进行仿真时,中间钻臂与左右钻臂之间的最短距离分别为984.6、580.8 mm,中间钻臂与左右钻臂之间没有发生碰撞干涉,可以实现多臂协同钻孔作业;而以钻臂各关节变量最小所得钻孔顺序进行仿真时,中间钻臂与左右钻臂之间最短距离分别为193.5、580.8 mm,综合考虑钻臂各关节结构尺寸,中间钻臂与左钻臂之间最短距离为193.54 mm,此时两钻臂之间可能发生碰撞干涉。
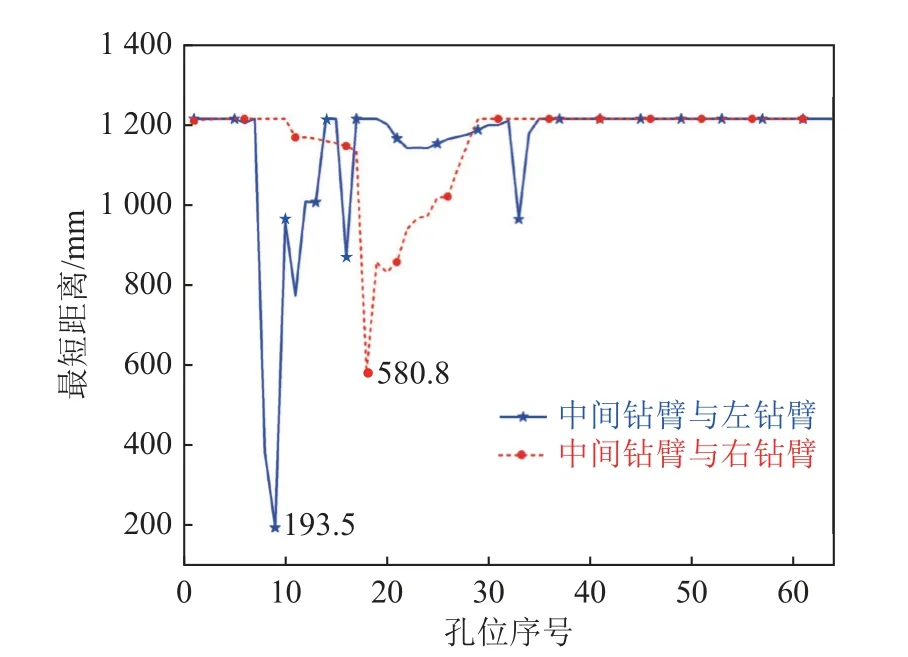
图18 关节变量最小孔序方案钻臂之间最短距离Fig.18 Shortest distance between the drill booms of the joint variable minimum hole sequence scheme
综合安全性、施工效率等因素,以钻臂末端移动距离最短为优化目标所得孔序规划,即图13a 所示3 个钻臂的钻孔顺序方案最为合理,可以实现多臂协同无碰撞钻孔,提高三臂凿岩台车施工效率。
4 结 论
1) 采用D-H 法建立三臂凿岩台车钻臂运动学模型,基于蒙特卡洛法得到三臂凿岩台车有效工作空间,以避免各钻臂之间碰撞干涉和均匀分配各个钻臂的钻孔任务为目标,对每个钻臂工作空间进行合理划分。基于RBF 神经网络算法对钻孔定位进行研究分析,仿真结果表明最大定位为2.94 mm,误差控制在3%以内,可以实现钻孔精确定位。
2) 以钻臂末端移动行驶距离最短和各关节变量之和最小作为优化目标,提出一种改进遗传算法对三臂凿岩台车进行孔序规划研究,并与蚁群优化算法和自适应遗传算法2 种现有孔序规划算法对比,以钻臂末端行驶距离为优化目标时,3 个钻臂末端行驶的总距离分别缩短了5.39 m 和10.84 m,以钻臂各关节变量之和最小作为优化目标时,3 个钻臂各关节变量之和分别减少了2.76 rad 和5.34 rad。
3) 基于各钻臂工作空间和2 种方案所得钻孔顺序,对多钻臂协同钻孔时钻臂之间碰撞干涉进行仿真验证,结果表明以关节变量最小孔序方案钻孔作业时中间钻臂与左钻臂之间最短距离为193.5 mm,综合考虑钻臂外观结构尺寸,此时可能发生碰撞,而以距离最短顺序方案进行钻孔时,中间钻臂与左右钻臂之间最短距离分别为984.6、580.8 mm,可以有效避免各钻臂之间碰撞,实现3 个钻臂协同无碰撞钻孔,故以距离最短作为优化目标的孔序规划方案最为合理,可以有提高钻孔施工效率。