受白噪声干扰的多智能体系统稳定性分析
2023-10-17高会昌潘维运
高会昌,潘维运
受白噪声干扰的多智能体系统稳定性分析
高会昌,潘维运
(沈阳工业大学 理学院,辽宁 沈阳 110870)
为分析在二次型环境中受到噪声干扰的非线性多智能体系统的集群行为,引用了白噪声干扰因素,运用矩阵、图论和李雅普诺夫稳定性判别等方法,证明了在满足一定条件下,多智能体系统的个体会聚集在一起,进入到一个有界的区域.通过数值仿真,对比了在二次型环境下有无白噪声干扰的多智能体系统成员的表现,验证了结论的合理性.
多智能体系统;聚集性;稳定性;白噪声
自然界中,经常能够看到各种生物群体的团队合作现象,如鸟类迁徙、蜂群采蜜等.受到这种集群行为的启发,众多研究者将智能体模拟成生物群体中的每一个个体,开始了对多智能体系统动力学行为的研究工作.目前,多智能体系统在无人机集群[1]、智能车辆公路系统[2]、多机器人团队协作[3]等领域得到广泛应用.Reynolds[4]等较早地对集群运动进行了定义,并且提出了3个集群运动标准.Vicsek[5]等提出了一种非平衡多智能体系统模型,仿真发现系统中的个体在一定条件下可以按照同样的方向飞行,说明系统具有集群性.Gazi[6]等讨论了一类生物群体模型,模型中的个体之间具有吸引或者排斥的作用力,研究了系统模型的稳定性,并在文献[7]中讨论了带有外源的生物群体模型稳定性问题.文献[8]研究了一类躲避相撞的觅食群体的稳定性问题.潘维运[9]等研究了带有领航者的多智能体系统的稳定性,得出在领航者导航作用下,追随者在没有环境信息的情况下也能到达目标.
在实际应用中,系统的动态性能不可避免地会受到各种环境因素的干扰,这些干扰会使系统的稳定性受到影响,比较常见的是噪声干扰.Djaidja[10]等研究了具有白噪声和时滞的多智能体系统在定向固定拓扑下的一致性问题.王参军[11]等在Levins模型基础上研究了噪声对集合种群的稳定性影响.文献[12]引入了一般噪声(可能是有色噪声和白噪声的混合)来建模MAS的扰动,证明了MAS在噪声状态下是稳定的,并且MAS的状态在均方中具有渐近增益.文献[13]研究了当领导者受到白噪声干扰时,多主体系统的有限时间一致性优化问题.
本文在文献[9]中的非线性多智能体系统模型基础上,引入白噪声这一干扰项,研究了在二次型外源环境中多智能体系统受到白噪声干扰下的稳定性,并且通过模拟仿真分析结果的合理性.
1 问题描述
1.1 图论

1.2 模型描述




2 多智能体系统稳定性分析


状态中心的动力学方程为

由式(4)可知,多智能体系统状态中心的运动受外源和高斯白噪声的影响.


令



3 数值模拟
考察无白噪声干扰及受到标准白噪声干扰情况下多智能体系统聚集行为,Matlab软件仿真结果见图1.
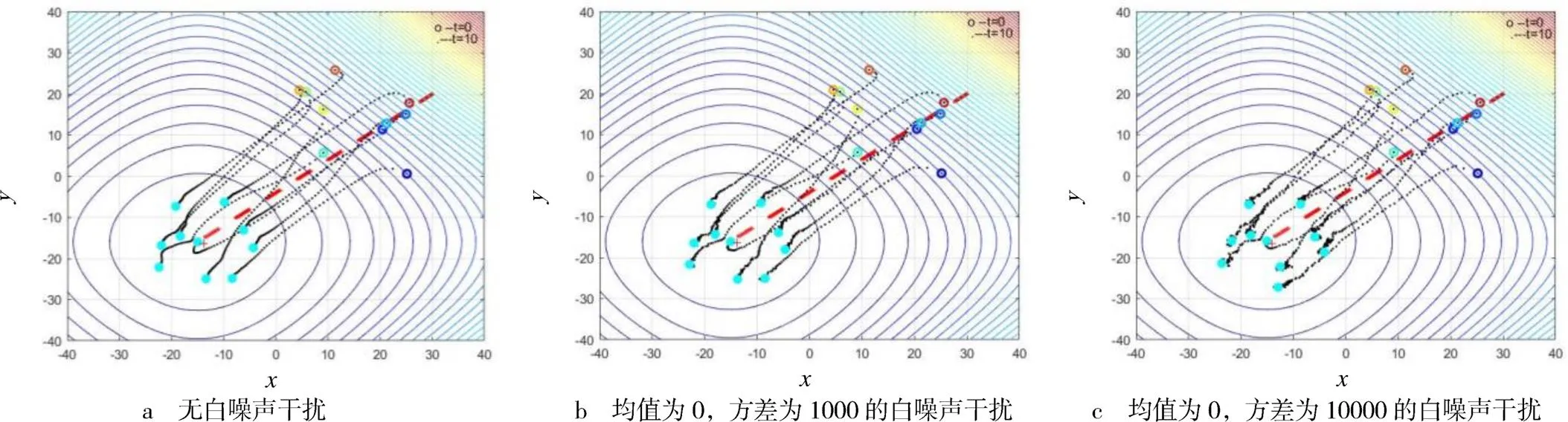
图1 多智能体系统聚集仿真
图1a~c中智能体初始位置相同,蓝色实圈是多智能体系统成员的最终位置,黑色小点是多智能体系统成员的运动轨迹.在多智能体系统没有受到白噪声干扰的情况下,智能体成员逐渐聚集到系统状态中心区域,系统成员运动到稳定区域的过程是平滑的;在多智能体系统受到均值为0,方差为1 000的白噪声干扰时,系统成员依然会聚集到中心区域,系统成员运动到稳定区域的过程有一定的波动;在多智能体系统受到均值为0,方差为10 000的白噪声干扰时,系统成员运动到稳定区域的过程波动较大.
4 结语
本文给出了在二次型环境中受白噪声干扰的多智能体系统的稳定性分析,在适当条件下多智能体系统中的智能体会沿着系统状态中心聚集到一个有界区域.数值模拟表明,白噪声方差越大,对多智能体系统的聚集行为影响越大.
[1] 张婷婷,蓝羽石,宋爱国.无人集群系统自主协同技术综述[J].指挥与控制学报,2021,7(2):127-136.
[2] 谢光强,赵俊伟,李杨,等.基于多集群系统的车辆协同换道控制[J].广东工业大学学报,2021,38(5):1-9.
[3] Xu W Y,Cao J D,Yu W,et al.Leader-following consensus of non-linear multi-agent systems with jointly connected topology[J].IET control theory and applications,2014,8(6):432-440.
[4] Reynolds C W.Flocks,herds and schools:A distributed behavioral model[J].SIGGRAPH Comput Graph,1987,21(4): 25-34.
[5] Vicsek T,Czirok A,Ben-Jacob E,et al.Novel type of phase transition in a system of self-driven particles[J].Phys Rev Lett, 1995,75(6):1226-1229.
[6] Gazi V,Passino K M.Stability analysis of swarms[J].IEEE Transactions on Automatic Control,2003,48(4):692-699.
[7] Gazi V,Passino K M.Stability analysis of social foraging swarms[J].IEEE Trans Syst Man Cybern B Cybern,2004,34(1): 539-571.
[8] Liu Q,Wang L,Liao X.Stability analysis of swarms with interaction time delays[J].Information Sciences,2012,192:244-254.
[9] 潘维运,郑毓蕃.有领航者的多智能体系统的稳定性分析[J].控制理论与应用,2016,33(3):398-405.
[10] Djaidja S,Wu Q.Consensus seeking in multi-agent systems with noisy and delayed communication in digraphs having spanning tree[J].International Journal of Systems Science,2015,47(12):2975-3058.
[11] 王参军,李江城,梅冬成.噪声对集合种群稳定性的影响[J].物理学报,2012,61(12):105-114.
[12] Shan Q H,Yan J Y,Li T S,et al.Containment Control of Multi-Agent Systems With General Noise Based on Hierarchical Topology Reconfiguration[J].IEEE ACCESS,2019,7:56826-56863.
[13] Xu S S,Cao J D,Liu Q S,et al.Optimal Control on Finite-Time Consensus of the Leader-Following Stochastic Multiagent System With Heuristic Method[J].IEEE Transactions on Systems Man Cybernetics:Systems,2021,51(6):3617-3644.
[14] 薛志斌.智能群体系统集群行为的动力学建模与分析及其仿真研究[D].兰州:兰州理工大学,2012.
Stability analysis of multi-agent system disturbed by white noise
GAO Huichang,PAN Weiyun
(School of Science,Shenyang University of Technology,Shenyang 110870,China)
To analyze the swarm behavior of a nonlinear multi-agent system disrupted by noise in a quadratic environment,the white noise interference factors was referenced.By using of matrix,graph theory and Lyapunov stability discrimination techniques,it was proved that individuals in the multi-agent system will gather together within a bounded area under specific conditions.Additionally,numerical simulations was conducted to compare the performance of multi-agent system members with and without white noise interference in a quadratic environment,thereby validating the conclusion.
multi-agent system;aggregation;stability;white noise
1007-9831(2023)09-0004-05
O23
A
10.3969/j.issn.1007-9831.2023.09.002
2022-11-24
高会昌(1997-),男,山东济宁人,在读硕士研究生,从事多智能体系统研究.E-mail:673867460@qq.com
潘维运(1978-),男,山东日照人,讲师,博士,从事非线性系统、多智能体系统研究.E-mail:275540589@qq.com
