无感无刷直流风机控制器的设计
2023-10-12唐贤传
胡 飞, 唐贤传, 李 敏
(芜湖职业技术学院,安徽 芜湖 241006)
风机作为日常生活中的必备产品,常见用于通风、散热等场合,原有风机大多采用交流电机,但转换效率偏低,而无刷直流电机(Brushless DC Motor,简称BLDC)具有效率高、噪音小、调速性能优良等优点。国外在各个领域广泛采用无刷直流电机,其控制器也由分离式发展为集成一体式,国内无刷直流电机还主要应用于家电领域中,对可靠性和安全性要求更高的工业及汽车应用领域中仍然处于测试与验证环节。
一般风机对转速精度和响应时间要求较弱,出于成本的考虑,无刷直流风机普遍采用无位置传感器的控制方式。常见的无刷直流风机控制方案采用“MCU(DSP)+预驱芯片+MOS(或IGBT)”结构,由于各个模块分离,在成本方面不占优势,且会造成较高的故障率。
1 系统的总体设计
风机是典型的恒功率负载,一般采用外转子结构,既可以将扇叶和转子同时设计,又可以使用风机为自身定子散热;控制对象是一款额定电压24 V、额定功率240 W的无感无刷直流风机,其定子绕组采用星形连接,转子采用4对极永磁体对称结构,主要用于配电箱或控制柜的散热,经LCR测试仪测量电机参数为:相电阻Rs =0.032 2 Ω(50 Hz),相电感Ls =114.38 μH(1 kHz)。
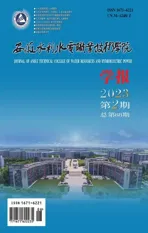
设计采用“STM8S+PT2522”结构实现低成本、大功率的风机控制器,其系统结构如图1所示。其中意法半导体的STM8S单片机价格低廉、性能稳定、外设丰富,被广泛应用在各种工业应用领域中;PT2522是针对无感无刷直流电机的控制驱动芯片,基于测量电机的反电动势(BEMF)过零点来实现换相,具有稳定的控制效果,不易受到电机的差异性影响;其软切换技术可达到梯型波或类弦波电流波形,进一步降低电磁噪声。
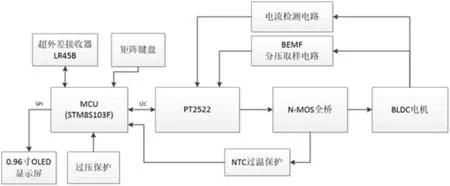
图1 控制器系统组成结构图
2 硬件设计
2.1 三相全桥电路
直流无刷风机控制器的原理是将直流电经电子换相结构变换为三相交变信号,由三相交变信号形成旋转磁场,与永磁体的转子相互作用,让转子实现跟随转动,电子换相结构主要由6只场效应管(MOS)构成三相全桥电路;NMOS具有内阻小、工作速度高等优点,单桥臂上下功率元件一般均为NMOS,采用6块NCE4060K构成如图2所示的全桥电路。
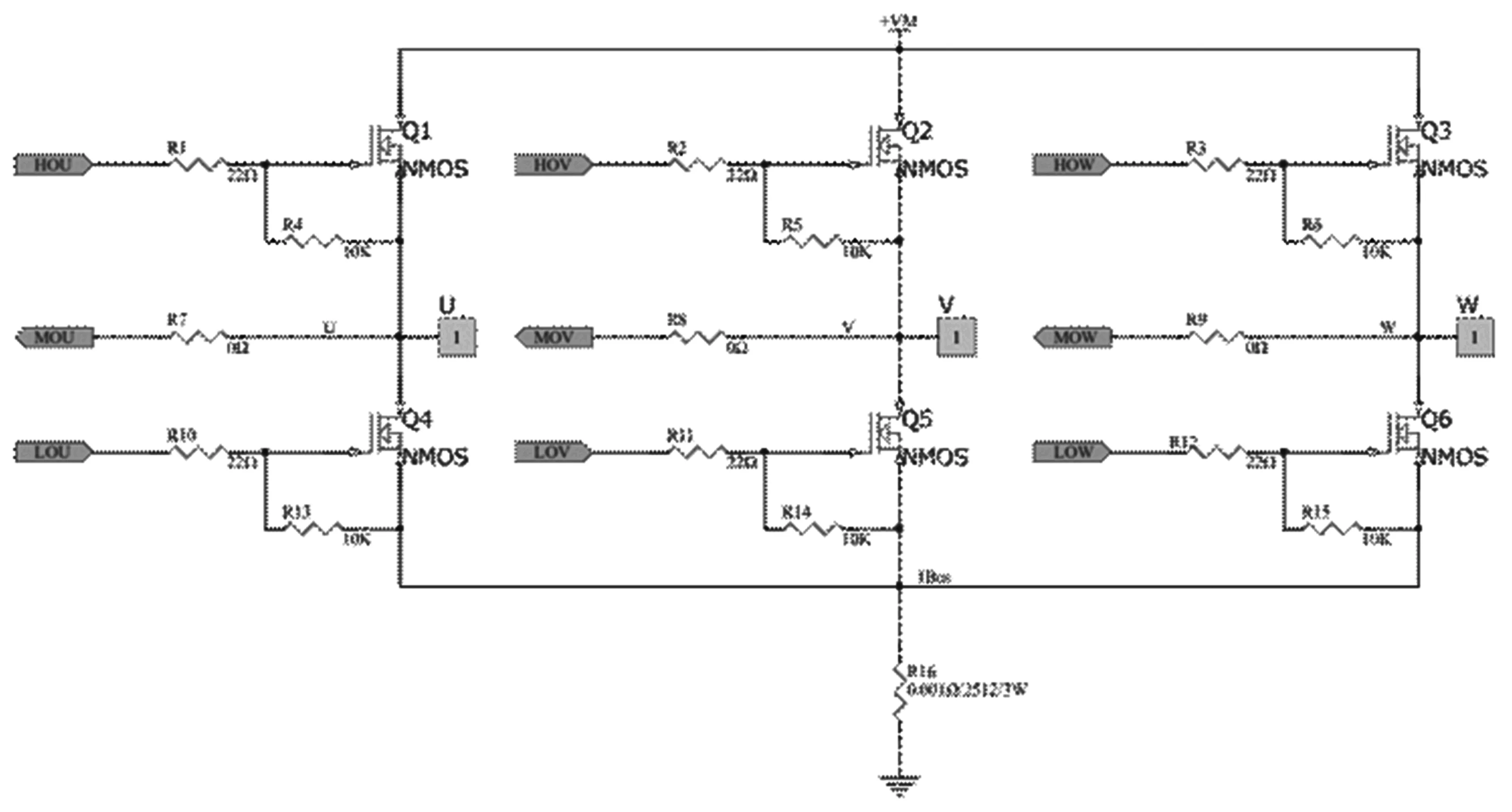
图2 三相全桥电路
场效应管驱动电路设计的原则是减少开关损耗、驱动波形振荡小、过冲小;PT2522内部集成有栅极驱动电路,为避免栅极驱动在脉冲激励下产生振荡,通过接入小阻值驱动电阻使振荡迅速衰减,同时能调节功率器件的开关速度,经试验确定为22 Ω;为减少栅极回路电感值,将驱动电阻尽可能靠近对应驱动的MOS管;为改善MOS管的米勒效应,在MOS管的栅极和源极接入10 kΩ电阻;采用高精度低阻值的合金采样电阻R16来实现母线电流采样;其封装为2512,阻值0.001 Ω(精度±1%),可通过对采样电阻的端电压放大平滑后得到母线平均电流值IBus。
2.2 PT2522应用电路
PT2522应用电路原理如图3所示,其内部集成有栅极驱动电路,其栅极驱动的自举二极管和自举电容需外置,自举二极管应选择快恢复二极管并有较高的反向击穿电压,系统采用DHE1J超快恢复二极管作为自举二极管,根据经验自举电容为4.7 μF,经实验验证2.2 μF~10 μF的自举电容均可以让自举升压电路正常工作。
图3 PT2522应用电路图
PT2522通过反电动势过零信号实现换相,但系统噪声或反电动势信号太弱都会影响过零信号判断的准确性,可调整外部滤波电容和内置数字滤波器参数的方法来调整换相时间,进而实现120°~150°的换相角度;其中FLT引脚外接滤波电容(作调整换相时间用),根据风机特性调整对应滤波电容的大小。
2.3 母线电流与电压采样
为实现恒流控制及过流保护,需实时感知电机的工作电流,通过采集图2中IBus点对应的电压值可计算得出电机工作电流,但由于采样电阻阻值小,对应压降易受噪声影响,采用单电源运放TLV316构成信号放大电路,同时前置滤波电路和伪差分调理电路;风机运行过程中相电流存在波动,对测量数值作软件滤波处理,得到其平均工作电流值;通过对电压+VM按照10∶1的比例经模数转换器(ADC)采集,计算出工作电压值,用于欠压和过压保护,当电压低于12 V或高于26 V时,风机不启动。
2.4 硬件布线
在风机控制器的实际布线中,指导思想是大电流和小电流分开设计、减小大电流回路面积使电磁干扰减小、电流采样采用开尔文接法减小共模干扰等,线路板采用4层结构,板厚1.6 mm,外层1 oz,芯层0.5 oz;大电流优先走线,并尽可能使回路面积较小,减小因换相造成电磁干扰;母线回路放置大容量铝电解电容(采用2颗1 000 μF/35 V)去耦以减小换相过程中造成的电压波动;为增强其工作的适应性,加入TVS二极管(SMBJ30CA)应对可能出现的瞬态电压,作为测量温度的NTC热敏电阻,需靠近贴放NMOS附近。
3 软件设计
3.1 电机功能调试
PT2522内置无刷直流电机的梯形波算法,但需根据风机特性调整参数,使用PTC BLDC UI Kit通过USB接口与电脑相连,其功能类似于仿真器,在电脑端使用可视化图形调试界面。涉及主要参数有初始化、启动参数、转速稳定到停止相关的设定、保护参数以及芯片本身的时钟校准等,通过软件修改电机不同运行阶段的参数设置,使其达到预期的控制效果。
无感无刷直流风机的运行过程主要分为启动、加速以及减速环节,其中启动过程最为复杂,由于启动初始阶段的电机转速较低,反电动势过小,无法提供可靠的过零信号用于稳定换相;系统中使用三段式启动法,通过给定幅值、恒定不变的脉冲组合形成恒定磁通将转子预定位到固定位置,继而通过升频升压的方法使电机加速,以形成稳定的反电动势过零信号用于换相。
风机应用需考虑顺逆风工况,在启动前应判断顺逆风状态,相应会延长加速到最高速的时间,特别是逆风工况,首先要刹停风机后再提供更大的启动转矩;调试中通过电流钳获得稳定转速下的相电流波形,调整提前换相角度以及对应死区时间,使得相电流波形尽可能对称;对称的相电流波形反映出参数设置是适宜的;其中保护参数主要涉及过流、过压以及堵转保护,根据外置电路参数设置对应值。
通过可视化界面,调整各项参数,使无刷直流风机的控制达到预期目标,并通过OTP烧录方式将相应参数固化至PT2522内部ROM中。
3.2 STM8S编程
微控制器可通过模拟电压、脉冲宽度调制(PWM)及I2C通信三种方式经PT2522控制无刷直流风机,STM8S微控制器内部无DAC功能,因此选择“脉冲宽度调制(PWM)+I2C通信”相结合的方式实现转速控制;使用定时器2实现频率固定(1 kHz),占空比可变的脉冲,STM8S通过I2C接口与PT2522通信,可得到电机转速、工作状态;可视化界面调整的参数均可以通过I2C接口实时在线修改;为实时获取电机运行参数,通过0.96寸OLED显示屏显示当前的电机运行参数。
常见风机的控制方式为本地控制以及遥控控制,采用矩阵键盘来实现本地控制,按键功能分别为开关机、加减速以及参数设置,采用超外差接收器LR45B实现遥控控制,微控制器的工作流程如图4所示。
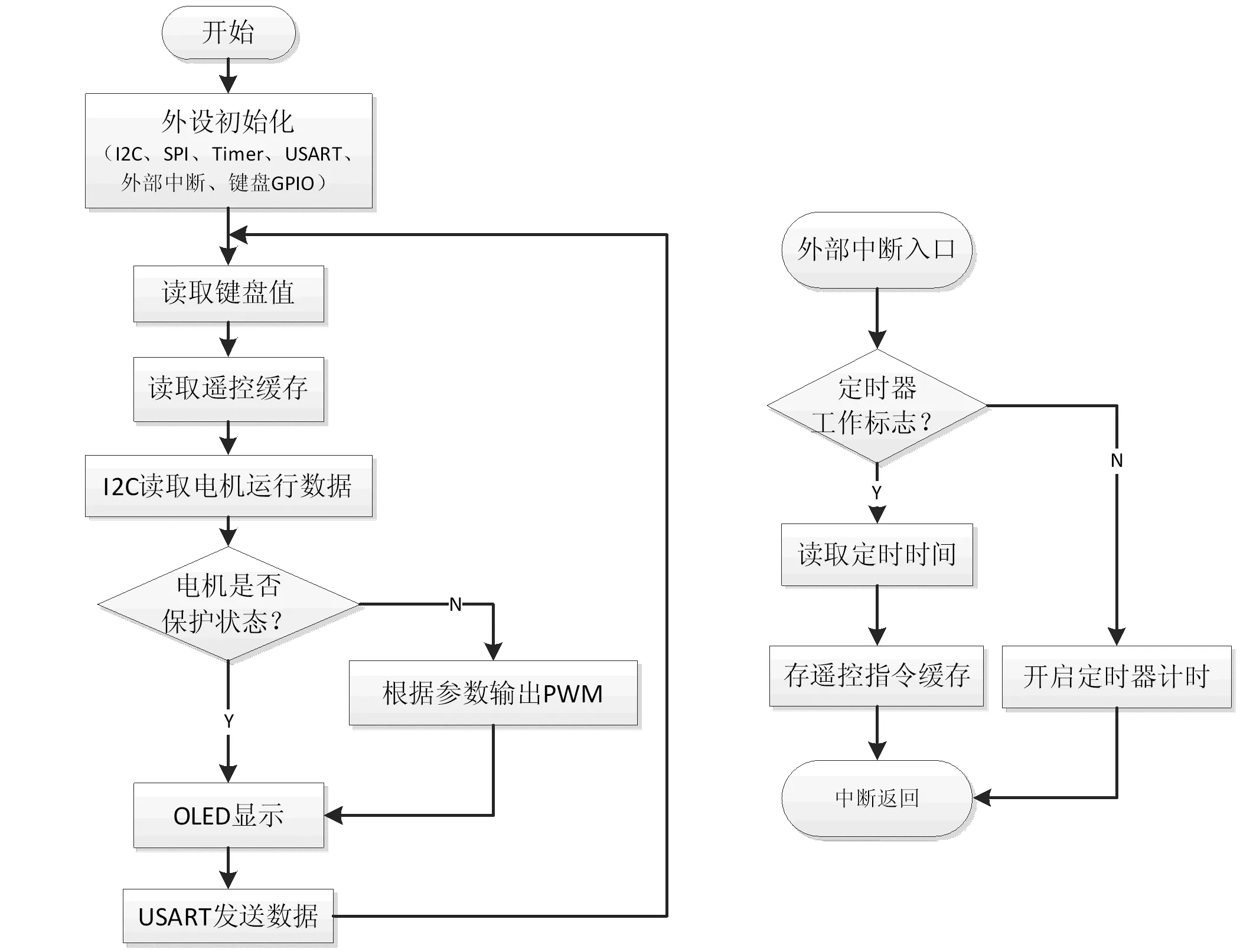
图4 微控制器中软件工作流程图
4 数据采集
实验测试平台包括基于“STM8S+PT2522”的实验DEMO板、无刷直流风机、SPI接口OLED显示屏、矩阵键盘、LR45B接收器等;数据采集有示波器、电流钳和PTC BLDC UI Kit模块。
由于风机较长时间会工作在低速段,极限情况下才会全时段工作在高速段,因此低速档位设置需密集,可通过键盘或遥控器切换不同档位;通过对启动时间测量,在设置有顺逆风判断条件下,从静止加速到最高速约9 s,满足风机应用场合的需求。
如图5所示,记录了不同转速下的相电流波形,控制器在高转速下已实现了梯形波换相,达到了类弦波的控制效果,很好地达到了设计目标。
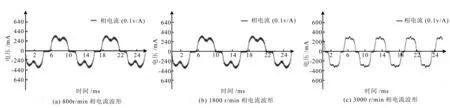
图5 不同速度段对应的相电流波形
5 结 论
无感无刷直流风机相较原有有刷风机在噪音、节能方面均更具优势,由场效应管构成的电子换相结构延长了其使用寿命。基于“STM8S+PT2522”的架构设计的无感无刷直流风机控制器,较原有分离元件组成的风机控制器集成度更高、故障率更低,在风机的低速段容易启动、高速段能够提供更大风量,同时实现了风机工作数据的可视化。经过各个速度段的实验验证,在启动时间、运行电流、加速响应、保护机制等性能指标均符合风机使用需求,且成本低廉适合大规模推广应用。