药用玻璃包装自动装盒系统设计与实现
2023-09-14赵航任亚恒程煜安旸
赵航,任亚恒,程煜,安旸
药用玻璃包装自动装盒系统设计与实现
赵航1,2,任亚恒1,2*,程煜1,2,安旸1
(1.河北省科学院应用数学研究所,石家庄 050081; 2.河北省信息安全认证工程技术研究中心,石家庄 050081)
针对现阶段药用玻璃包装产业升级对数字化、自动化、智能化的设备的迫切需求,提出一种药用玻璃瓶(西林瓶、安瓿瓶、口服液制剂瓶等)自动装盒方法,以降低劳动强度,提高产品质量。以安瓿瓶为例,在充分分析具体需求的基础上,借助计算机辅助设计技术和仿真技术,采用“自顶向下”的设计方法,完成系统三维模型机械设计和运动仿真。利用PLC工业控制技术,建立能够兼容不同规格产品的生产线的控制模型,实现系统智能控制,并完成样机的试制。在国内几家大型药用玻璃包装生产企业成功应用后,所研制的药用玻璃瓶自动装盒系统能够有效减少因传统装盒方法对瓶身造成的划伤和污染,包装人员成本减少了40%,产品合格率提高了5%。所研制的药用玻璃瓶自动装盒系统可显著提高产品的质量、降低劳动成本,加快了行业自动化、智能化进程。
药用玻璃包装;自动装盒;机械设计;智能控制;产业升级
药用玻璃包装装盒工艺是在药用玻璃包装生产线末端,产品成型并经质量检测设备检测完成以后,将合格的玻璃包装产品移入产品包装盒内。传统的装盒工艺主要依靠人工,效率低,费时费力,并且二次接触易对产品瓶身造成划伤[1],随着国家对药包产品安全的严格管控,传统的装盒工艺无法满足当下的生产需求[2]。围绕“中国制造2025”规划,政府工作报告要求加快传统产业转型升级,研发数字化、自动化、智能化的在线装盒设备已成为当下玻璃药包生产企业的共同需求[3]。
本文以传统的卧式安瓿瓶生产线为例进行研究,卧式安瓿瓶生产线装盒要求更为复杂,其具体需求如下:生产线分左、右两路出瓶,要求两路出瓶线独立装盒,便于废品溯源;生产线出瓶速度快,国内生产机速最快达160个/min,装盒速度要满足最快生产速度;由于实际厂房空间的限制,装盒设备设计要紧凑,不宜过大;为最大程度减少人员成本,要求装盒工位越多越好;采用递增错位排列装盒方式;设备稳定性高,能够满足24 h不间断的工作时间要求。该研究成果对实现药用玻璃包装行业自动化、智能化生产有重大意义。自全球新冠疫情蔓延以来,国产疫苗需求日趋强烈。据Airfinity公司预测数据显示,2022年底全球新冠疫苗产量将达到90亿剂[3],相应的疫苗玻璃包装瓶的需求量激增,向国内药包生产企业提出挑战。
目前,国内外卧式安瓿瓶生产线在线装盒设备主要采用单瓶体抓取,左、右两路装入同一盒的方式。这种方式装盒工位少,大多不配备手动备用包装台,尚不能完全匹配全部规格产品的生产线;整机占地面积大,虽结构稳定,但价格昂贵;国内相关产品还不成熟,企业主要依靠进口,设备供货周期长。与国外设备相比,本文提出的药用玻璃安瓿瓶在线自动装盒的方法,采用整排抓取,左右两路独立装盒的工艺,利用PLC工业控制技术,建立控制模型,实现系统智能控制,能够兼容不同规格产品的生产线[4]。系统具有结构紧凑、稳定性高、操作简单、价格便宜等优点。研制的安瓿瓶在线装盒系统的应用,解决了行业内共性难题,同时满足了国内新冠疫苗对药用玻璃包装的迫切需求[5]。
1 整机结构总体设计
安瓿瓶自动装盒系统主要分为三部分,分别是机械系统、控制系统和上位机软件系统。
传统安瓿瓶生产线分为左右两路出瓶线,药瓶生产厂家要求两路出瓶线的产品独立进行装盒。每路装盒机构包括四部分,分别为理瓶机构、抓取机械手、负压吸附箱体组件、多工位盒体循环输送线。在理瓶机末端设有搬运抓取机构,衔接搬运机构设有备用手动包装[6]。
系统工作流程:理瓶机构衔接安瓿瓶生产线,经入瓶传感器,将安瓿瓶依次紧挨码放至理瓶装置支撑单元;待安瓿瓶输送至抓取工位,抓取机械手通过负压吸附箱体组件,将理瓶机构上的安瓿瓶整排抓取,放置到循环线盒体内;搬运抓取装置将理瓶机构上因抓取机械手故障而漏吸的玻璃瓶抓取至料仓,待料仓满后进行人工装盒。系统工作流程见图1。
根据系统工作流程图,借助计算机辅助软件Creo,通过“自顶向下”的设计方法,通过建立骨架模型,利用零部件与骨架模型的数据关系,建立不同的零件与子组件。逐渐细化模型,进行了整机三维实体建模[7],其三维结构见图2。

图1 系统工作流程
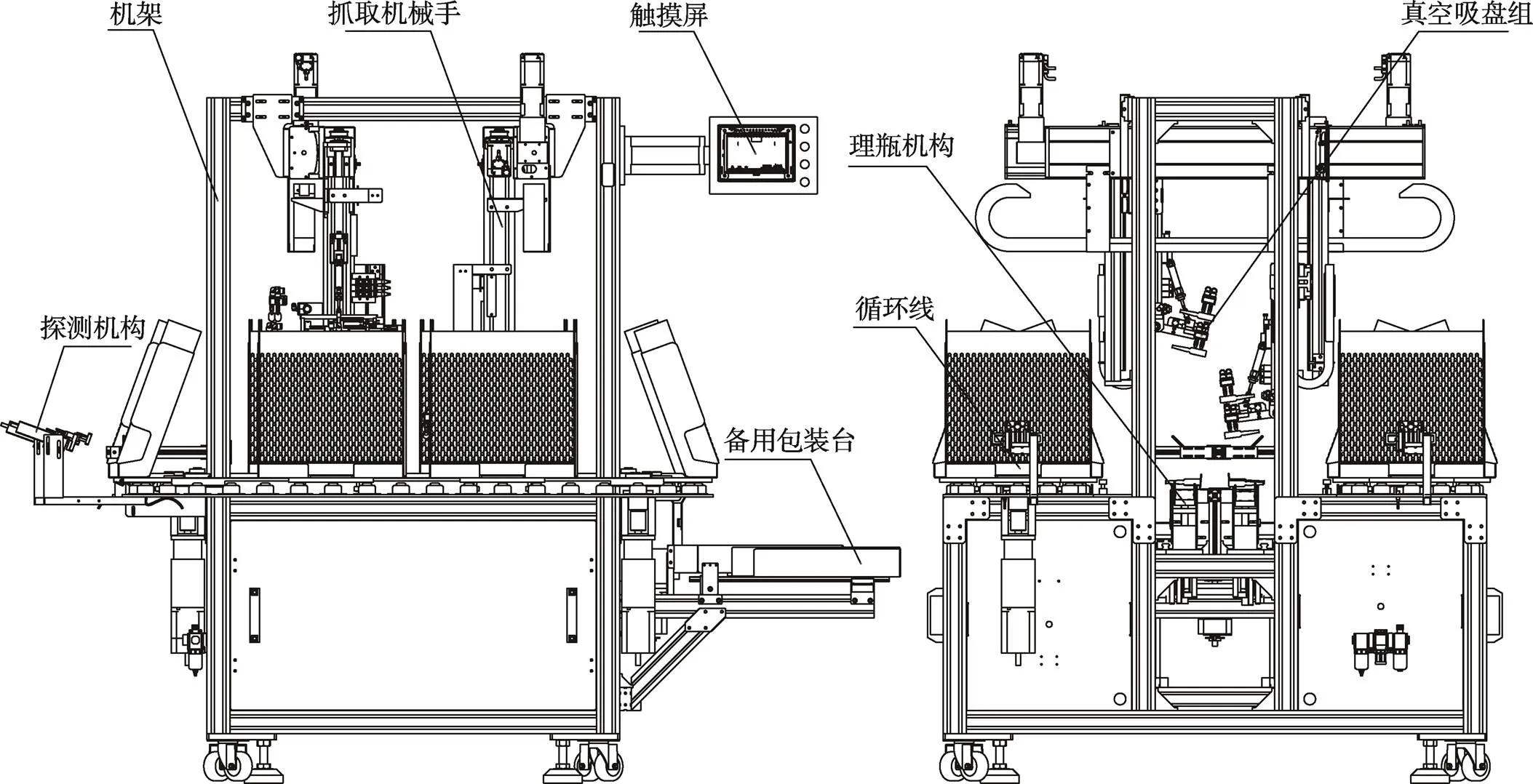
图2 整机三维结构
2 关键机构设计
2.1 抓取机械手机构设计及运动规划
抓取机械手是安瓿瓶自动装盒系统的关键组件。抓取机械手由-轴滑台、气缸、真空吸盘组、真空发生器、电机、同步带轮、直线导轨等组成。通过负压吸附的原理,进行整排安瓿瓶的抓取和放置。传统的安瓿瓶生产线是通过瓶身之间的相互挤压和摩擦,在胶木或尼龙蜗杆的带动下,安瓿瓶进入包装工位,易造成瓶身的划伤和污染。在装盒过程中,为保证瓶身不滑落,要求瓶身与水平面成不小于20°的夹角。在抓取机械手上设有翻转气缸,待整排抓取以后,翻转相应的角度,同时在翻转气缸的固定端设有缓冲装置,防止因吸盘组抓取时过压而损坏吸盘组和瓶身。另外在真空吸盘组上设有摆动气缸,保证在装盒的过程中,奇偶行抓取不同个数的安瓿瓶,抓取机械手见图3a所示。
抓取机械手是一个连续不间断的往复循环过程,并且放置目标点是逐层递增的。为实现在不撞击机架的同时保证抓取机械手的高效率,进行了三维结构的运动仿真。根据多种仿真轨迹的对比,解得最优解,在轴抓取后和轴抓取快退后,设置中间点,每次经过中间点再运动到下一位置[8-9]。抓取机械手在控制系统作用下完成自动装盒过程,抓取机械手路径规划,如图3b所示。
2.2 多工位循环线机构设计
为最大程度地减少人员成本,要求装盒工位越多越好。本文以6工位为例,多工位循环线机构由机架、万向轴承、滑块、链轮、链条、胀紧套、气缸、电机、减速器等组成。装盒工位下方设有定位机构,空盒每次到达装盒工位,待定位机构进行定位后,方可进行装盒,以此消除运动误差;机械手装完一箱后,在循环线的带动下将满盒箱体运送至下一工位,将空盒运送至装盒工位继续装盒。另外,在装盒工位前一个工位设有盒检-探测装置,该装置有2个作用:检测此工位有无盒;探测此工位盒内有无瓶。只有在此工位有盒无瓶的条件下,方可进入装盒工位进行装盒;如不满足有盒无瓶的条件,则继续循环判断。待6个工位满盒之后,报警灯提示工人进行换盒。
传统的循环线由电机通过链条或同步带带动,配合环形导轨-滑块进行定位,其造价高,性价比低。本系统所设计的多工位循环线三视图见图4所示。
2.3 间歇理瓶装置结构设计
理瓶机构由电机、轴承、导轨、滑块、偏心轮、V型槽等组成。V型槽分为动V型槽和定V型槽,分别与驱动装置和机架相连。理瓶机构承接安瓿瓶生产线,当有一个瓶子进入理瓶工位,理瓶装置通过动V型槽带动瓶子前进一个工位,落在定V型槽上。V型槽的槽间距与瓶身外径相同,使进入理瓶机构的瓶子在定V型槽上依次相邻紧挨排列。理瓶机构的驱动方式是由2套凸轮装置组成,驱动动V型槽在-方向作往复运动,2个偏心轮的偏心距离与瓶身半径相等。当电机每旋转一圈,V型槽带动整排瓶子在方向前进一个瓶身距离。
通过运动仿真软件,定义自由度、链接约束和运动副模拟出瓶子在V型槽上的椭圆形运动轨迹[10],间歇理瓶装置见图5。

图3 抓取机械手机构设计

图4 多工位循环线三视图
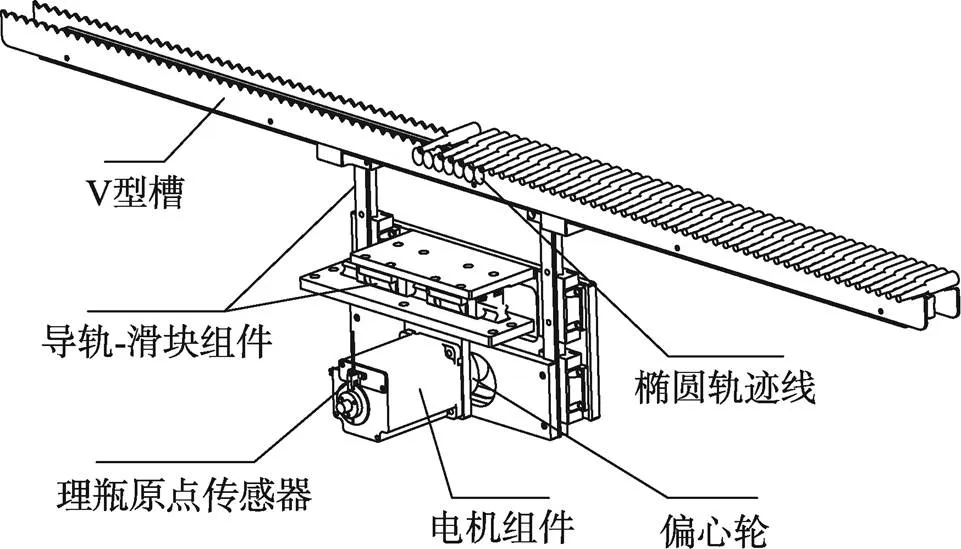
图5 间歇式理瓶装置
2.4 其他附件装置说明
目前,药用玻璃包装按产品分为安瓿瓶、西林瓶、预灌封针筒、卡式瓶、输液瓶、口服液制剂瓶等,按成型工艺分为模制瓶和管制瓶,其生产线分为卧式制瓶线和立式制瓶线。不同药用玻璃瓶之间的区别见表1。
不同药用玻璃瓶和生产线要求自动装盒设备不完全一样,但装盒原理基本一致,重点在于装盒设备如何与生产设备相衔接。本文以安瓿瓶为例介绍了一种药用玻璃瓶自动装盒方法,若将此方法应用于其他玻璃药包生产线还需进行上料装置、Z-R机械手设计。区别于安瓿瓶依次排列的出瓶方式,西林瓶、口服液瓶、卡式瓶等产品生产线大多为杂乱无序的出瓶方式,需要借助Z-R机械手配合上料装置,完成产品从生产线到装盒机理瓶机构的过渡。另外,国内大部分西林瓶、卡式瓶生产线以及立式制瓶生产线为单路出瓶,还需进行单路衔接机构结构设计,具体应用效果还需实验进行验证。考虑到预灌封针筒外形复杂和输液瓶外形体积跨度大的特点,本文提出的自动装盒方法还不能兼容这2种药用玻璃包装的生产线,仍需继续研究。
表1 药用玻璃瓶之间的区别
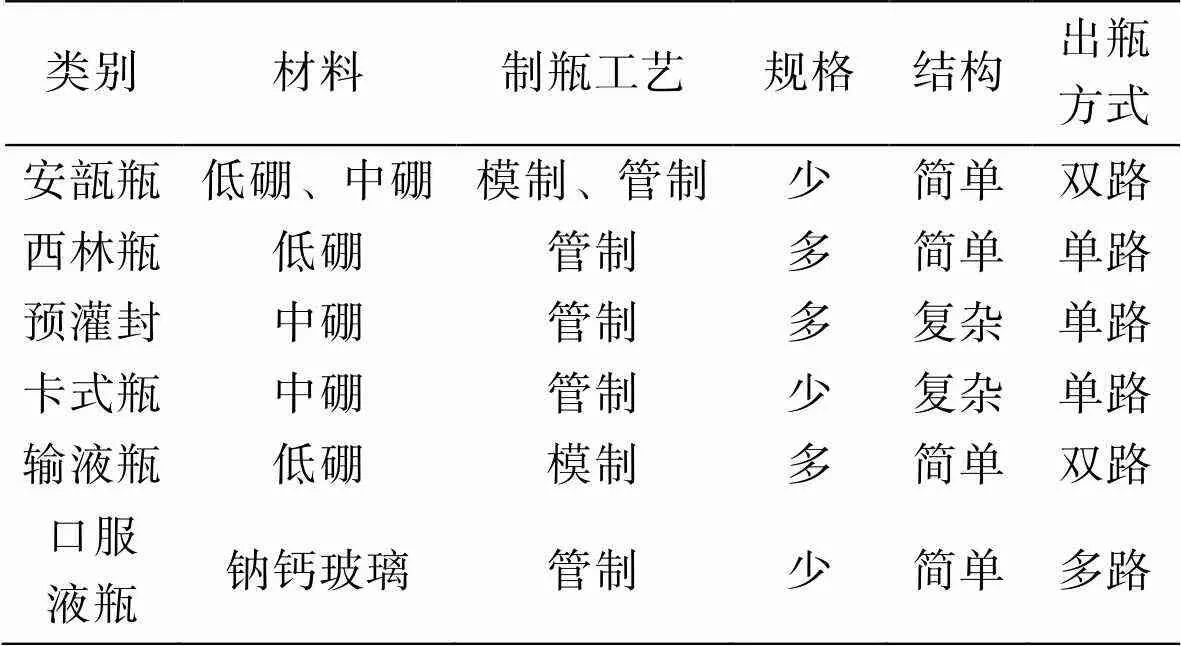
Tab.1 Difference between pharmaceutical glass bottles
3 系统控制部分
3.1 整机控制过程
系统启动前先进行复位自检,长按复位按钮3 s。为避免机械手与循环线撞机,机械手轴先复位找原点,待轴复位完成后,机械手轴、理瓶机构、搬运抓取机构、备用包装台同时复位找原点,最后循环线复位找原点。循环线一次找原点完成后,定位装置进行定位,判断探测工位是否有盒无瓶,如果不是有盒无瓶的情况,循环线运动一个工位,继续判断探测工位是否有盒无瓶,直到探测到有盒无瓶的状态出现,循环线方可停止。如果经过6次判断,探测工位没有出现有盒无瓶的状态,系统则报警。
安瓿瓶自动装盒机置于安瓿瓶检测机末端,将检测合格的瓶子输送至装盒机入瓶工位。系统启动后,装盒入瓶工位设有触发传感器,触发传感器检测到入瓶信号;理瓶机带动安瓿瓶在V型槽上前进一个工位,安瓿瓶在V型槽上依次排列,整排瓶子传送至装盒工位;机械手通过真空吸盘组整排抓取,放置到循环线箱体内;系统会自动识别抓取的奇偶行数,当抓取偶数行时,吸盘组放置气缸动作,吸盘组少抓取一个玻璃瓶,且循环线带动箱体移动半个瓶身距离,再将整排放置于箱体内,保证奇偶行交错递增排列装盒;待装满盒后,探测工位判断是否有盒无瓶,将有盒无瓶工位运行至下一装盒工位;继续进行装盒,如果经过6次判断,探测工位没有出现有盒无瓶的状态,系统则报警[11]。
在理瓶装置末端设有瓶检测有无传感器。每检测到一个瓶子,搬运抓取机构将安瓿瓶从理瓶机构抓取至备用包装台,备用包装台推瓶组件将抓取来的安瓿瓶推至手动包装台内。正常情况下搬运抓取机构、备用包装台是不动作的,只有在抓取机械手故障而漏吸玻璃瓶时,为防止停机影响生产,才进行备用的手动装盒操作。控制流程见图6。

图6 系统控制流程
3.2 控制系统硬件设计
根据控制要求,系统采用工业PLC为控制单元[12-15]。控制器选用三菱公司FX3U60MT,触摸屏选用MT6070IH,分别控制3台伺服电机、3台步进电机、4个气缸、6个继电器、2个警示灯、2个真空发生器以及9个漫反射光电传感器等。安瓿瓶生产线为两路瓶,除触摸屏以外,其他电器元件均为双份。PLC通过脉冲+方向的方式,实现伺服电机和步进电机的位置控制。PLC输出端开关量通过电磁阀控制气缸和真空发生器动作。系统设有手动和自动2种工作模式,当系统出现故障,为不影响生产,操作者可切换到手动模式,待故障排除以后,再切换回自动模式。出于安全考虑,系统还设有“紧急停止”功能,当紧急停止按钮启动后,整个系统立即停止运行。控制系统框图见图7。

图7 控制系统组成
3.3 控制系统软件设计
控制系统软件设计包括PLC控制程序设计和触摸屏程序设计[16]。根据系统控制流程图将PLC控制程序分为复位程序、启动程序、故障诊断-报警程序等三部分,借助三菱梯形图编程软件进行程序编写。触摸屏通过RS232和RS485分别与2个PLC通信,触摸屏程序分为参数设置、手动调节、功能设置、故障诊断等四部分,触摸屏主界面见图8a。
复位程序:系统上电后进行复位操作,通过复位程序控制各个执行机构进行机械回零。
启动程序:系统复位回零后运行启动程序,控制理瓶机构、负压吸附箱体组、机械手、搬运抓取装置、备用包装台和循环线完成安瓿瓶自动装盒。
故障诊断-报警程序:系统采用全闭环的控制模式,自动装盒过程中每个动作完成之后借助诊断程序进行自检,判断各个工序完成情况,若出现运动偏差,系统会报警并自动修正运动误差;如因卡瓶引起的传动机构错位,设备会自动进行复位,无需人工干预,大大增加了设备无故障工作时间[17]。
参数设置:系统通过触摸屏参数设置界面(见图8b),对机械手各个动作位置和速度、电机加减速、理瓶机构速度、轴增量、轴增量、抓取延时等进行设置。
手动调节:系统复位完成后,在触摸屏手动调节界面(见图8c)中进行自动装盒目标位置标定,能够手动操作系统各个执行元件,并设有调试模式开关,在系统调试阶段,可模拟现场机速,进行脱机操作。
功能设置:触摸屏功能设置界面(见图8d)设有系统辅助功能按钮,能够独立开启/关闭一些功能,能够屏蔽传感器的功能,防止避免因传感器的损坏而停机[18]。
故障诊断:触摸屏故障诊断界面(见图8e)实时监控设备工作状态,当设备因故障停机时,能够及时将故障原因显示出来,便于操作者保养和维护。
3.4 控制模式选择以及对产品合格率的影响
根据控制流程图,系统采用顺序+PID全闭环控制模式,按照装盒工艺依次控制各个执行机构。每个执行机构均装有传感器,实时采集设备运行状态,将位置状态实时反馈至控制器,并进行PID运算。当出现由于干扰或电机过载等情况而导致运动偏差时,系统会在下一个工作周期之前自动补偿运动偏差,无需操作人员人工干预,大大增加了设备无故障工作时间。下面以理瓶机构为例,介绍系统采用的PID双闭环控制模式,其理瓶机构PID闭环控制原理见图9。
系统控制给定理瓶机构的旋转角度,控制器经过计算得出所需脉冲数,通过电机驱动器驱动电机转动相应的角度;待1次理瓶结束后,一方面监控驱动器内部所接收到脉冲数,并传送至内环PID,以此纠正运动偏差,形成内部闭环;另一方面通过外部编码器得到电机实际旋转角度,将其传送至外环PID,并与系统给定的旋转角度相比较,以此纠正旋转偏差,形成外部闭环[19]。
目前,传统的安瓿瓶生产线装盒方式是安瓿瓶通过瓶身之间挤压进入包装台,再由包装工将瓶子移入盒体内。每次移入盒体内瓶子总数不一定是满盒数,故以上操作一般需要3~4次才能装满盒。一方面瓶身与瓶身挤压进入包装台的过程中易对玻璃瓶体造成划伤,另一方面包装工将玻璃瓶移入盒体过程中易对瓶体造成污染,这两方面均增加了产品的不合格率。
本文设计的自动装盒系统通过负压整排吸附装盒的方式,避免了瓶身与瓶身之间的挤压,同时整个装盒过程依靠机械手完成,无需人工干预。配合系统采用的PID双闭环控制模式,增加了系统的运动精度和稳定性,减少了系统故障率,以此来提高产品的合格率。

图8 触摸屏界面

图9 理瓶机构PID闭环控制原理
4 设备试运行结果分析
系统已在国内几家大型药用玻璃包装生产企业成功应用,安瓿瓶自动装盒机应用现场见图10。经使用情况分析,该设计产品能够兼容1~20 mL安瓿瓶产品,适用最高生产机速不低于160个/min,能够兼容全国95%以上的安瓿瓶生产设备。企业在应用现场选择了2条生产工况相同的安瓿瓶生产线,其中的一条装有自动装盒设备。该生产线两路出瓶线能够独立进行装盒,单边6个装盒工位,整机额定功率为1.5 kW,抓取机械手定位精度和重复定位不大于0.02 mm,要求供气气压不小于0.4 MPa,设备适宜工作温度为0~50 ℃,设备无故障工作时间不小于360 h。

图10 系统应用现场
企业分别从包装人员成本投入和产品合格率两方面进行了对比,对6个月内的数据进行汇总,初步得到两方面的结论:安瓿瓶包装人工成本减少了40%;安瓿瓶产品的合格率提高了5%。
5 结语
提出了一种药用玻璃包装瓶的自动装盒方法,以安瓿瓶为例,完成了机械结构建模和控制系统设计,完成了样机的组装与调试,并在安瓿瓶生产厂家得到了推广应用。经过实际测试,装有本设计产品的安瓿瓶生产线能够有效地减少企业包装人员的成本和提高产品的质量。目前,我国有上百家药用玻璃包装生产企业,因此,本研究具有可观的经济效益和很好的发展前景。
虽然本系统研究取得了一定的成果,但本系统还不能够兼容所有玻璃药用包装产品生产线,仍需要继续研究。
[1] 佚名. 解析药用玻璃瓶的包装和验收[J]. 中国包装, 2020, 40(4): 8.
Anon. Analysis of Packaging and Acceptance of Medical Glass Bottles[J]. China Packaging, 2020, 40(4): 8.
[2] Anon. Pharmaceutical Glass Bottles Market 2015: According to Radiant Insights[R]. M2 Presswire, 2015.
[3] 马磊, 赵永霞. 从自动化、数字化到智能化的工业4.0系统解决方案[J]. 纺织导报, 2020(3): 26.
MA Lei, ZHAO Yong-xia. Oerlikon Designs the Future of Chemical Fiber Industry with Industry 4.0 Solution[J]. China Textile Leader, 2020(3): 26.
[4] PIRKELMANN S, RAETHER F, SEIFERT G. Top-down Material Design of Multi-phase Ceramics[J]. Open Ceramics, 2022, 9: 100211.
[5] 冯凤玲, 陈慕沙, 赵锦, 等. 新冠病毒疫苗的研发前景和挑战[J]. 华南预防医学, 2022, 48(2): 195-198.
FENG Feng-ling, CHEN Mu-sha, ZHAO Jin, et al. Prospects and Challenges of SARS-CoV-2 Vaccine Research and Development[J]. South China Journal of Preventive Medicine, 2022, 48(2): 195-198.
[6] 罗仁胜, 陈海峰, 沙海涛, 等. 在线检测装置及包装材料生产系统: China, 212133578U[P]. 2020-12-11.
LUO Ren-sheng, CHEN Hai-feng, SHA Hai-tao, et al. Online Detection Device and Packaging Material Production System: China, 212133578U[P]. 2020-12-11..
[7] 杨继超, 张旭耀, 尚书聪. 发射装置基座自顶而下设计策略研究与应用[J]. 兵器装备工程学报, 2020, 41(4): 86-90.
YANG Ji-chao, ZHANG Xu-yao, SHANG Shu-cong. Research and Application of Top-down Strategy in Weapon Launcher Support Design[J]. Journal of Sichuan Ordnance, 2020, 41(4): 86-90.
[8] CHANG Rui, JIA Qing-xuan, CHU Ming, ZHANG Xiao-dong. Coordinated Control after Grasping the Space Targets Using Controllable Damping Mechanism[J]. Applied Sciences, 2022, 12(20): 10568.
[9] WANG Chuan-wei, WANG Sai-sai, MA Hong-wei, et al. Research on the Obstacle-Avoidance Steering Control Strategy of Tracked Inspection Robots[J]. Applied Sciences, 2022, 12(20): 10526.
[10] YU Yong-peng, JI Shu-ai, CHEN Ji-wen, et al. Optimal Design of Concrete Automatic Distribution System for Digital Manufacturing[J]. Journal of Physics: Conference Series, 2020, 1654: 012084.
[11] 刘新宇. 安瓿瓶检测设备研发[D]. 石家庄: 河北科技大学, 2015.
LIU Xin-yu. Research and Development of Ampoule Testing Equipment[D]. Shijiazhuang: Hebei University of Science and Technology, 2015.
[12] ZHANG Yi-peng, LI Min, ZHANG, Xiao-ming, et al. Defeat Magic with Magic: A Novel Ransomware Attack Method to Dynamically Generate Malicious Payloads Based on PLC Control Logic[J]. Applied Sciences, 2022, 12(17): 8408.
[13] WU Feng, HUANG Kun, LI Hao-tian, et al. Analysis and Research on the Automatic Control Systems of Oil-Water Baffles in Horizontal Three-Phase Separators[J]. Processes, 2022, 10(6): 1102.
[14] WANG Xing, TANG Xian-wei, DONG Zeng-shou, et al.. Research on Rapid Development Platform of PLC Control System[J]. High Technology Letters, 2021, 27(2): 210-217.
[15] XIAO Yan-jun, SHI Lin-han, ZHOU Wei, et al. Application of Embedded Soft PLC in the Control System of Rapier Loom[J]. PLoS One, 2021, 16(9): 0257629.
[16] GAO Jian-ye, WANG Jin-feng, XIE Jing. Application of PLC and HMI in the CO2Transcritical Refrigeration Experimental Platform[J]. Scientific Reports, 2022, 12(1): 15199.
[17] LI Yi-bing, WAN Hu, JIANG Li. Alignment Subdomain-Based Deep Convolutional Transfer Learning for Machinery Fault Diagnosis under Different Working Conditions[J]. Measurement Science and Technology, 2022, 33(5): 055006.
[18] 李燕. 自动装盒机缺盒自动停机功能改进[J]. 机电信息, 2021(21): 22-24.
LI Yan. Improvement of Automatic Stop Function of Automatic Box Filling Machine for Lack of Boxes[J]. Mechanical and Electrical Information, 2021(21): 22-24.
[19] 李禄源, 毛伟伟. 基于多目标优化PID的纸浆浓度控制系统[J]. 包装工程, 2021, 42(21): 247-253.
LI Lu-yuan, MAO-wei. PID Pulp Concentration Control System Based on Multi-Objective Optimization[J]. Packaging Engineering, 2021, 42(21): 247-253.
Design and Implementation of Automatic Packing System for Pharmaceutical Glass Packaging
ZHAO Hang1,2, REN Ya-heng1,2*, CHENG Yu1,2, AN Yang1
(1. Institute of Applied Mathematics, Hebei Academy of Sciences, Shijiazhuang 050081, China; 2. Hebei Authentication Technology Engineering Research Center, Shijiazhuang 050081, China)
In view of the urgent demand for digital, automatic and intelligent equipment in the upgrading of pharmaceutical glass packaging industry at present, the work aims to propose an automatic packing method for pharmaceutical glass bottles (penicillin bottles, ampoule bottles, oral liquid bottles, etc.) to reduce labor intensity and improve product quality. With ampoule bottle as an example, on the basis of full analysis of the specific requirements, the computer aided design technology and simulation technology were combined with the method of "top-down" design to complete the mechanical design and motion simulation on the 3D model of the system. PLC industrial control technology was employed to establish the control model compatible with production lines for different specifications of products, so as to realize the intelligent control of the system, and complete the trial production of the prototype. After successful application in several large pharmaceutical glass packaging enterprises in China, the automatic packing system for pharmaceutical glass bottles developed could effectively reduce the scratches and pollution caused by traditional packing method, reduce the cost of packaging personnel by 40% and improve the qualified rate of products by 5%. The automatic packing system for pharmaceutical glass bottles can significantly improve the quality of products, reduce labor costs, and accelerate the process of automation and intelligence in the industry.
pharmaceutical glass packaging; automatic packing; mechanical design; intelligent control; industrial upgrading
TB486;TH122
A
1001-3563(2023)17-0181-08
10.19554/j.cnki.1001-3563.2023.17.022
2023-02-03
中央引导地方科技发展资金项目(自由探索类基础研究)(236Z1604G)
责任编辑:曾钰婵
