基于麦克风阵列的目标电抗器噪声提取与分离技术研究
2023-07-30郭佳熠潘亦睿耿江海王一林律方成
王 平, 于 琨, 郭佳熠, 潘亦睿, 耿江海, 王一林, 律方成
(1.河北省输变电设备安全防御重点实验室(华北电力大学),河北 保定 071003;2.国网天津城西公司,天津 3001903;3.中国电力科学研究院有限公司,北京 100192)
0 引 言
特高压并联电抗器是特高压远距离输变电网中的核心设备之一,具有调整无功、限制过电压、快速切断电弧和稳定电网等诸多功能[1-3]。特高压并联电抗器运行中的状态检测对于保障设备乃至特高压输电网的安全都至关重要。基于声信号的状态检测技术具有成本低、无接触等优点,是运行条件下开展特高压并联电抗器状态检测的可行手段,但在变电站等声环境复杂场景下存在着噪声干扰较大、非目标电抗器与目标电抗器声信号高度相似等问题,导致目标电抗器声信号难以准确提取[4-6]。因此,研究以变电站内多台特高压电抗器为主体,针对单一目标电抗器的混合噪声采集和分离技术,对特高压并联电抗器的状态监测具有重要意义。
目前在噪声分离提取的研究中,普遍采用的方法有:运用听觉规律分离(Computational Auditory Scene Analysis,CASA)、深度神经网络(Deep Neural Networks,DNN)、多分辨率耳蜗图(Multi-Resolution Cochleagram,MRCG)、功率归一化倒谱系数法(Power-Normalized Cepstral Coefficients,PNCC)、振-声相干分析分离方法等[7-10],应用范围较广的是盲源分离算法,也被称作盲信号分离(Blind Signal Separation, BSS),它指的是在源信号及其传输通道的参数都未知的情况下,仅由观测信号恢复或提取各源信号的过程,BSS 的主要任务是仅通过多通道系统观测数的多个样本来估计其源信号以及其传递函数[11]。文献[12]提出基于四阶累积量矩阵的特征分解联合多矩阵对角化的稳健盲波束形成。文献[13]利用了极小化互信息的独立成分分析(Independent Component Analysis,ICA)估计算法,并推导了一种基于累积量的近似方法。
波束形成算法做为信号处理的一个重要分支,在噪声分离提取领域中被广泛应用,所谓波束形成是把按照一定几何和规则排列的多元输入和输出进行一系列处理,例如加权、求和差、卷积等形成空间下指定性的方法。潘超等从正交级数展开波束形成入手,获取阵列和目标波束图两者之间的等价关系,使得阵列波束图逼近目标波束图[14]。褚志刚等基于球阵列建立坐标系,采用声源识别滤波求和的方法实现了三维空间的声源定位量化[15]。在盲源分离技术的现场应用中,噪声源信号受到现场环境的影响,复杂且具有一定的随机性,采集传感器往往达不到正定和超定算法的要求,所以介绍了一种分离精度高、适用范围广的欠定盲源分离技术[16]。在波束形成技术应用中,波束方向偏差、幅值和相角差和阵元位置误差等因素会导致接收信号的协方差矩阵出现重大偏差,导致波束形成算法性能不良,提出一种屏蔽噪声能力强、信号方向处理好的基于掩蔽函数的波束形成算法[17]。针对上述问题,将欠定盲源分离技术、基于掩蔽函数的波束形成技术相结合,对本次实验的噪声信号进行处理。
本文首先叙述了并联电抗器噪声产生机理,得到了各类噪声源的特征,仿照变电站的现场环境,在屏蔽室内采用麦克风阵列对电抗器周围进行布置;其次,通过麦克风阵列获得待测并联电抗器的声信号,提出一种基于掩蔽的波束形成算法,实现了对非目标电抗器噪声信号的屏蔽,并增益目标电抗器的声音信号;最后,采用文献[27]提出的基于掩蔽函数的欠定盲源分离(K-UBSS)算法,实现了混合矩阵的估计并恢复了单一噪声源,提高了噪声检测的效率及准确度。
1 特高压变电站噪声特征
特高压交流变电站的主要噪声源有变压器噪声、高压并联电抗器噪声、变电架构区域金具与导线的电晕噪声、空气动力性噪声和机械性噪声等[18],其中高压并联电抗器以低频噪声为主。
1.1 电抗器本体噪声
在高压并联电抗器内部,铁心是核心部件之一,同时也是最主要的振动源之一,研究铁心的振动机理是研究此类并联电抗器本体振动噪声机理的关键[19]。并联电抗器铁心包含铁轭和铁心柱两个部分,两个部分一般均由硅钢叠片构成,硅钢叠片由硅钢片堆叠而成。硅钢等铁磁性材料在磁场的作用下会发生磁化,在磁化的过程中,硅钢等材料还会发生磁致伸缩现象,硅钢的磁致伸缩是并联电抗器铁心振动的主要原因之一,对于磁致伸缩的研究是并联电抗器振动噪声机理研究的重要组成部分[20]。
电抗器的噪声主要是由铁心振动产生的,由两部分组成,即
F=Fmax+Fmag
(1)
式中:F为造成振动的外力矢量和,Fmax为麦克斯韦力,Fmag为磁致伸缩力。磁致伸缩力是铁心硅钢片磁致伸缩现象的一种等效应力,可以通过铁芯的磁致伸缩应变计算得出:
(2)
式中:ε为磁致伸缩应变;σ为磁致伸缩应力;D为弹性张量;f(B)表示铁芯磁致伸缩应变ε,应变大小与磁感应强度之间近似为线性关系,磁致伸缩应变可以由铁芯的磁感应强度通过磁致伸缩曲线计算获得。
麦克斯韦力是一种分布在铁心饼和气隙界面处的表面力[21],一般通过麦克斯韦应力张量Tmax进行计算:
(3)
B=μH
(4)
式中:H为磁场强度矩阵;μ为磁导率矩阵;I为单位矩阵;S为铁芯饼与气隙交界面的面积。
1.2 电抗器风扇噪声
冷却系统噪声主要包含水流和空气产生的流体噪声以及泵体等产生的机械噪声,属于典型的风机噪声[22],通过对电抗器的声压进行测量,得到了风扇平均声压级频谱分布情况,电抗器风扇的最大峰值在500~600 Hz处,该处声压频率相比于其他频率高5 dB以上。
1.3 电抗器附近随机噪声
变电站内的随机噪声信号主要有电晕、鸟鸣、施工和人声几类,其中最主要、影响最明显的为电晕噪声[23],文献[28]采用谱减法语音增强技术对电晕噪声进行了分离,其具有短时脉冲性的特点,通过噪声频谱分析结果可以发现,在0~20 kHz的频带范围内,能量分布比较均匀,满足宽频带噪声特点。而鸟鸣、施工和人声等噪声随机性很强,采集时可有效避免,如不慎混入上述随机噪声,通过K-UBSS算法可进行有效剔除。
综上,特高压变电站内的主要噪声源包括集中在100~500 Hz 的中低频段的变压器和高压并联电抗器噪声、峰值集中在500~600 Hz的电抗器风扇噪声还有主要分布在 100 Hz 以下的低频段以及 1 kHz 以上的高频段的电晕噪声。在频域上,其他噪声与高压并联电抗器的频谱分布不同;在时域上,电晕噪声的短时脉冲性与变压器、高压并联电抗器噪声近似平稳的特征也存在较大差异。
2 基于掩蔽函数的麦克风阵列的波束形成器
按照噪声源的种类,可以将噪声分为:(1)与待测电抗器不同向但同类型的噪声,如其他相的电抗器等;(2)与待测电抗器同向但不同类型的噪声,如待测电抗器附属散热风扇的噪声等;(3)与待测电抗器不同向且不同类型的噪声三种。处理方向性噪声与不同类型噪声所采用的方案不同,其中波束形成算法是处理方向性噪声的可行方案,盲源分类算法是分离不同类型噪声的常用方法。
波束形成技术作为麦克风阵列信号处理的重要组成部分,对麦克风阵列采集到的数据进行线性组合处理,得到一个标量波束输出,使波束对准信号方向,有效地增强目标信号,抑制干扰信号[24],本文采用波束形成算法消除目标电抗器非同向的噪声,布置传感器阵列,通过不同信道获得信号的运算,减弱一部分声信号而加强部分方向的声信号。
麦克风阵列,是由多个麦克风按一定的形状规则排列在不同位置的阵列系统。根据声源与麦克风阵列的距离,麦克风阵列可分为近场模型和远场模型[25]。根据传声器阵列的拓扑结构,可分为线阵、平面阵和体阵列等。
两个麦克风之间的距离为r,噪声源信号的最高频率的波长为λmin,若声源点到阵列中心的距离S满足S≥2r2/λmin为远场模型,否则为近场模型。根据文献[29]可知,测点距离电抗器本体的距离为0.3 m或者2 m,特高压电抗器大部分频谱都集中于2 000 Hz以内,选择S=0.3 m,λmin为2 000 Hz时的波长,r=0.1 m,通过计算可得应选取远场模型,有利于信号的增强。
本文的研究对象为变电站中呈“一字型”排列的三台电抗器,在变电站中除特高压电抗器以外,还存在其他设备,故对于已知方向的目标电抗器来说,需要建立坐标获取该方向上的噪声信号,所以本文主要研究对象为一维均匀线性阵列。
2.1 一维均匀线性麦克风阵列信号预处理
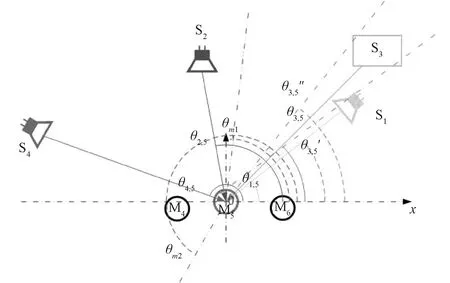
图1 并联电抗器周边声环境图Fig.1 Acoustic environment around shunt reactor
其中,阵列中每台麦克风接收到的声音信号关系式为
Ym(ω)=Xm(ω)+Vm(ω)=ejωc-1cos(θs-ψm)X(ω)+Vm(ω)
(5)
式中:m为麦克风的编号,m=4,5,6。Xm(ω)和Vm(ω)分别为麦克风接收到的声信号和噪声信号分量,r为两个麦克风之间的距离,r=0.1 m,c=340 m/s,θ为目标电抗器在坐标系中的入射角,θs=θ3,5,Ψm为麦克风位置的方向角,由图中位置可得,Ψ4=π,Ψ6=0,X(ω)为待测并联电抗器的声信号。
根据上述定义,可将三个麦克风接收的声信号可以构成一个矩阵,矩阵为
y(ω)=[Y4(ω),Y5(ω),Y6(ω)]=d(ω,θs)X(ω)+V(ω)
(6)
式中:d(ω,θs)=[e-jωc-1cosθx,1,ejωc-1cosθx]
2.2 基于掩蔽函数的波束形成算法
波束形成是对目标信号进行恢复的过程,即通过空间滤波,将第m个麦克风阵元带有增益的输出[26],经过滤波器处理之后的声信号为
(7)
hH(ω)d(ω,θs)=1
(8)
波束形成的核心就是找到一个最优的波束形成算法滤波器h(ω),使其满足式(8)中的约束,波束形成器的输出Z(ω)尽可能接近期望值信号X(ω)。波束图被用来描述波束形成系统对声信号入射角的灵敏度,它表示滤波器输出的声音信号相对于感兴趣声源发出的原始声信号的失真情况,它的定义为
(9)
对于图1的系统,可得
(10)
其中,ψn(ω)=[J(ωrc-1)e-jrπ,0,J(ωrc-1)ejnπ],J为一阶贝塞尔函数。
常见波束图的主瓣θ=0° ,对于本次课题研究的电抗器位置而言,目标电抗器的入射角θs=θ3,5,所以需要定义一个指向波束图,指向波束形成系统为
h(ω)=ψ-1(ω)γ*(θs)b
(11)

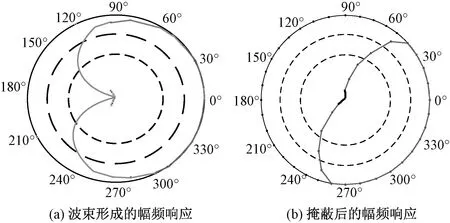
图2 阵列拓扑结构Fig.2 Array topology
构造两个指向型(Directivity)波束形成系统
(12)
式中:θ1=(θm1+θm2)/2+π,θ2=(θm1+θm2)/2,h1(ω)对应的波束图B1[h1(ω),θ]的零点在θ2,最大值点在θ1,h2(ω)对应的波束图B2[h2(ω),θ]的零点在θ1,最大值点在θ2。
通过定义两个波束形成系统的比值构造掩蔽区,比值为
(13)
通过分析η(ω,θ)的大小构造掩蔽函数时,当η(ω,θ)的值偏小时,主要声音来源于波束方向在大角度范围内,即[θ2,5,θ4,5]内,所以此时κ(ω,θ)应尽可能靠近;相反,当η(ω,θ)的值偏大时,κ(ω,θ)应尽可能靠近1。
在确定掩蔽函数κ(ω,θ)的变化率时,如线性变化,即默认声音衰减为线性下降,会导致靠近目标角度的噪声不能被有效地掩蔽,而更高阶的变化速率,会使初掩蔽后输出的时频域内出现不必要的屏蔽区,通过上述分析构造掩蔽函数为
(14)
利用掩蔽图可以屏蔽掩蔽区内的声音信号,然后将掩蔽图与最大值点在θs=θ3,5的波束图相结合,被称为掩蔽波束图,如图2(b)所示,得到最终掩蔽后的声音信号为
Γ[h(ω),θ]=B[h(ω),θ]κ(ω,θ)
(15)
在现场实验中,传感器的位置与待测声源的位置是已知且明确的,通过分析麦克风阵列的结构,确定选择一维均匀线性阵列的远场模型,并根据变电站中并联电抗器周边声音环境图,建立了二维笛卡尔坐标,通过麦克风阵元确定了待测并联电抗器的角度,根据已知目标电抗器角度,在现场实际测量声源到传感器阵列中心位置的方向角,并据此根据两者的相对位置可以确定掩蔽方向,本文构造了两个指向型波束形成系统,通过其比值的大小构造掩蔽图,确定了掩蔽函数,得到了最终掩蔽后的声音信号。该算法可以有效的屏蔽其余非目标电抗器的声音信号,最大程度的保留了目标电抗器周围的混合声音信号。
3 基于K-DPC聚类算法的欠定盲源分离算法
通过上文所述基于掩蔽函数的波束形成算法对原始声信号进行滤波处理,对非目标电抗器噪声信号屏蔽,消除了非目标电抗器的噪声,增益目标电抗器声信号,接下来采用K-UBSS算法(欠定盲源分离算法)实现混合矩阵的估计和单一噪声源的恢复。本节首先从信号的稀疏性角度出发,将欠定盲源分离算法(UBSS)分为两部分,一是基于单源点检测及改进归一化稀疏算法,该算法首先将声音的时域信号转为时频域信号,再通过SSP的单源点检测,增强时频支撑点的稀疏性,最后根据K-DPC聚类算法,完成单一声源的获取。
3.1 短时傅里叶变换
通过麦克风采集的声音信号一般为时域信号,而时域信号的稀疏性往往较差,采样点的信息不明显,就需要将离散的时域信号转换为频域上的信息。
短时傅里叶变换(STFT)通过给信号加窗,减小频谱泄露,获得较好的时频分辨率的同时进行傅里叶变化。汉宁窗相比于常见的矩形窗、汉明窗和高斯窗等泄露减小、幅值识别率提高,对被测信号是随机或者未知的效果更佳。
窗函数可以随着时间轴的平移,得到任意t时刻的频谱,构成二维的时频域信号。STFT得到的时频域(t,f)信号可以由式(16)和(17)来表示。
X(t,f)=AS(t,f)
(16)
(17)
式中:X(t,f)和S(t,f)分别为x(t)和s(t)在时频域(t,f)下的STFT的系数,ai为混合矩阵A的第i列向量。
3.2 基于SSP的单源点检测
混合的声音信号同步的非正交性很强,导致在同一时频点会存在多个源信号,为了保证单源点的充分稀疏性[27],采用基于SSP单源点检测算法,在处理非稀疏性信号上效果显著。
首先确定所有的时频支撑点,其目的主要为了剔除低能量的噪声点,假设观测点数量为S,时频支撑域为Ω,对于∀(t,f)∈S,时频支撑点的定义为
(18)
式中:‖·‖2表示2范数,因为考虑到噪声点,一般通过式(19)来判定时频支撑点。
(19)
式中:ξ为噪声相关的门限值,选取合适的门限值,可以有效的提高信噪比,提高后续聚类算法的鲁棒性,ξ的取值方法如下:

步骤4:计算ξn+1=(ξ1+ξ2)/2,若ξn=ξn+1,则取该值为阈值,若ξn≠ξn+1,跳转步骤2重新计算,初步阈值更新为ξn+1,直到ξn=ξn+1时停止计算。
对于任意一个时频支撑点X(t,f)均可分为实部和虚部,分别用Re和Im进行表示
(20)
通过上式可知,当且仅当仅存在单源点时,实部和虚部在多维空间中的向量具有相同或者相反的方向,通过定义观测点X(t,f)实部和虚部两者夹角θ:
(21)
通过定义可知,仅存在单源点时,可得cosθ=1,即θ=0°,但因实际周围的混合信号包含着多种固有噪声源和随机噪声,两者之间的方向完全相同的很少,需要在计算前设定一角度限定值Δφ,时频点(t,f)实部和虚部的绝对方向上夹角小于该值时,则该点为SSP。最后通过对单源点进行归一化,把线性聚类变换为球形聚类以及不同象限向量由唯一方向向量表示。
3.3 基于K-DPC算法的聚类分析
K-DPC聚类通过对所有数据点周围构造k个邻域,得到ρi和δi的决策图,形成密度峰值点(类簇中心)和中心点领域内数据点(类簇),对数据进行噪声点剔除和样本点分类,实现最后的快速高效聚类。
(1)初始化:定义两个时频观测点yi和yj的空间距离,之间距离满足欧几里得度量,即dij=‖yi-yj‖2,‖‖2表示向量的二范数。
(2)剔除离群点:聚类前剔除数据点中的离群点,首先定义领域平均距离ξ(yi)和领域最大距离max(yi):
(22)
max(yi)=maxyj∈K(yi)(dij)
(23)
式中:K(yi)为yi的K邻域,K的取值与试验数据相关。若对于任意一个观测点yi满足:
(24)
则认为该观测点为离群点,需要被舍去,剩余的观测点可以构成一个新的集合Y={y1,y2,…,yV}。
(3)首先定义两个概念:局部密度值ρi和局部高密度点的距离δi。
(25)
对Y内所有的数据点的位置进行排序,排序的原则为ρi的降序,得到一个新的集合Y′={y1′,y2′,…,yV′},定义Y′内各时频点与局部高密度点的高密度距离为:
(26)
利用最小二乘法的多项式拟合做出表达式:δ=f(i),通过求取f(i)的一阶导数为零的实数根,δ′=f'(i)=0,得到极大的实数根分别为i1,i2,…,in,对应的聚类中心分别为:{y1′,y2′,…,yn′}。接下来把其余样本点进行分配,分配原则如下:将样本点m分配给距离最近且ρn>ρm的第n类簇,最后得到有关ρ和δ的相关决策图。
(4)混合估计矩阵获取:将每一类簇中得到的P个样本点进行排序,排序点顺序为φ1,φ2, ……φP,则该类簇对应的单源点被定义为
(27)
(28)
通过欠定盲源分离算法将各声源的声信号进行分离之后,可以进行声信号的复原。文献[27]首先提出了一种 K-DPC 聚类新型欠定盲源分离算法,得到了混合噪声信号中的各声源信号分量,构建了独立声源信号库; 借助 k-UBSS 算法中的混合估计矩阵,提出了一种利用独立声源信号库获得大量混合时频谱图的方法,最后分别通过 VGGNet-16和ResNet-50 模型进行训练,实现了混合声音信号的分类。根据电抗器的噪声特征分析可知,电抗器的声信号特征主要为100 Hz及其整数倍的声信号,同时100 Hz成分占比最高。根据信号的频域特征,选择信号与待测声源信号特征接近的声信号即为分离出的电抗器信号。
4 实验分析
4.1 实验室试验
为了验证算法的准确性,需要利用已知特征的声源进行验证性试验,变电站现场均为混合噪声,因此本文在实验室内利用三台电抗器开展模拟试验。试验的具体设置如下:
为了还原变电站内混合噪声信号,本文以屏蔽室内3台小型干式并联电抗器作为研究对象,其包含A、B、C三相,设置C相为目标电抗器,为了研究波束形成算法的效果,采用三通道声纹采集装置和sony的ECM-VG1麦克风九支,编号为1~9,现场试验如图3所示。
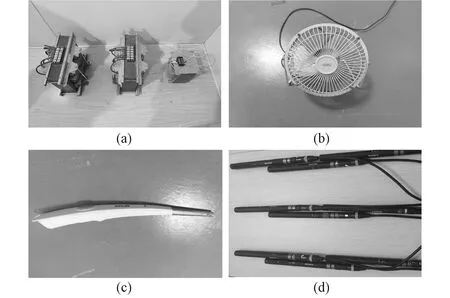
图3 实验室现场图Fig.3 Laboratory scene diagram
图3中(a)为三台噪声特征一致的电抗器,以示区分选取最右侧电抗器为目标电抗器;(b)为试验用小型风扇,用以模拟现场电抗器的冷却风扇;(c)为电火花发生器,用于模拟现场局放噪声;(d)为本次实验所用的麦克风阵列,由九支高性能麦克风组成,按照摆放位置分为一、二、三分阵列。当电抗器正常工作时,通过麦克风阵列进行噪声收集处理,该型号麦克风具有宽且平滑的频率响应(40 Hz 至 20 kHz)、高达 -33 dB 的出色灵敏度 (0 dB=1 V/Pa) 和低于 18 dB SPL 的固有噪声级别,可以较好地对三台电抗器、风扇、电晕等噪声等进行收集,实验室内各设备具体安装位置如图4所示。
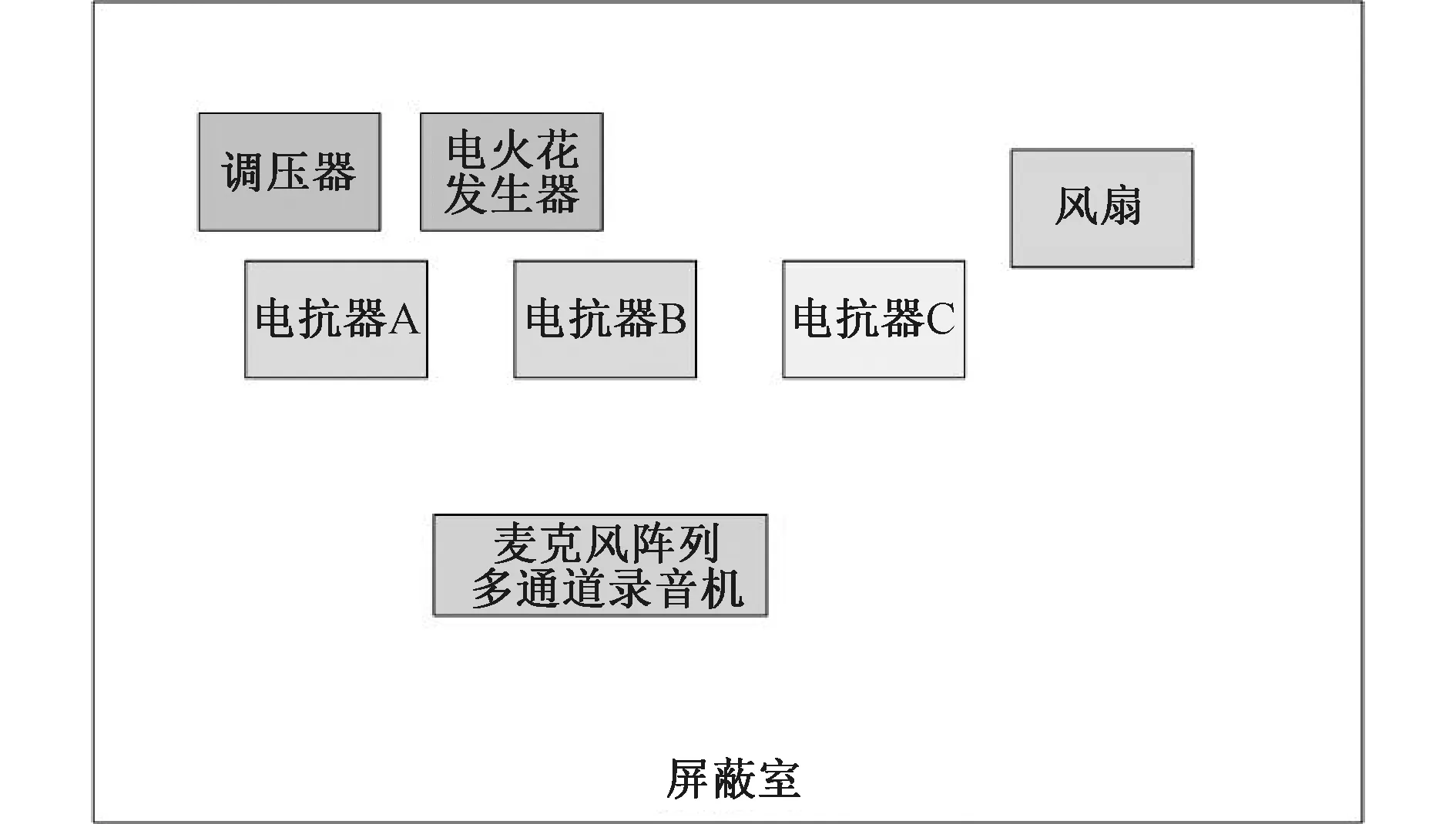
图4 实验室示意图Fig.4 Schematic diagram of laboratory
4.2 试验结果分析
通过实验研究基于掩蔽波束形成算法的性能。所需的频率无关的方向性图案被选为具有最大多重性的唯一零点的心形线,指向系数b如表1所示。
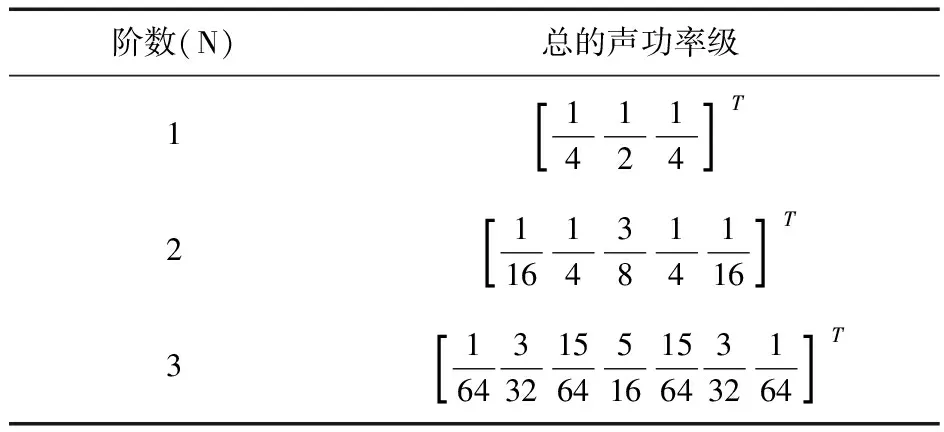
表1 一、二、三阶系数
指向性系数和麦克风个数有关,在没有进行掩蔽前,考虑一个半径为0.1 m的均匀阵列,分别设计的差分波束形成器的最大阶数为N=1,N=2和N=3,对应的麦克风个数分别为M=3,M=5,M=7。在不损失一般性的情况下,我们假设期望的观察方向为0°,即θs=0°。根据式(10)设计相应的指向波束形成滤波器。
图5(a)、(b)和(c)绘制了f=1 000 Hz时的1阶、2阶和3阶的设计波束图。从图中可以清楚看到,本文所设计的波束图在180°处有一个唯一的最小值,接近于0值,并且相对于横轴是对称的。阶数越高,信号的白噪声增益越小,方向性越强。但是,在未屏蔽之前,除了目标电抗器[330°, 120°]范围内保留信号外,其余角度的声音信号也会存在,所以需要通过掩蔽来进行进一步的滤波。因为现场采集时采用的为3通道声纹采集器搭配三个麦克风,故选择N=1时进行掩蔽。

图5 不同阶数波束形成器波束图Fig.5 Beam patterns of beamformers of different orders
图6为掩蔽后形成的波束图,可以看出,掩蔽后幅频响在150°~300°的范围内,接近于0;在60°~150°和330°~30°的范围内,在0~1之间过渡;在30°~60°的范围内,接近于1。波束的最大值和目标电抗器的期望值均在θ=45°处,与掩蔽前相比,除目标电抗器之外的角度均得到了有效屏蔽,当频率变化时,系统的幅频响应变化较小,引起的变化可以忽略不计。

图6 波束掩蔽图Fig.6 Beam masking diagram
根据图3可知,麦克风1、2、3为一组分阵列,记为分阵列1,麦克风4、5、6为一组分阵列,记为分阵列2,麦克风7、8、9为一组分阵列,记为分阵列3。图7为波束形成时麦克风1、2、3采集的混合噪声信号,麦克风阵列采集的时域信号稀疏性较差,尤其是电晕等随机噪声的能量分布被电抗器所覆盖,大部分的能量分布于0~2 000 Hz的范围内,2 kHz以上的高频段能量较少,100 Hz处的能量最大,说明采集的噪声的主体为电抗器本体噪声。

图7 波束形成前的麦克风阵列混合噪声信号Fig.7 Microphone array mixed noise signal before beamforming
从图8中可以看出,通过掩蔽后的波束形成算法,混合信号的信号幅值分布与原始信号相比发生了明显的变化。麦克风采集的原始时域信号幅值集中在[-1,1],经基于掩蔽后的波束形成算法的处理后,麦克风采集的时域信号幅值集中在[-0.5,0.5],有效屏蔽了非目标电抗器的声音信号的同时,保留了原始信号的能量分布特点,同时能量集中区域较为清晰。

图8 波束形成后的麦克风阵列混合噪声信号Fig.8 Microphone array mixed noise signal after beamforming
本文通过引入连续交替采样策略进行调制,将原始信号、固定波束形成的信号、自适应波束形成的信号和基于掩蔽函数的波束形成算法进行对比,得到了各麦克风阵元的平均功率谱密度,如表3所示。其中,固定波束形成算法的误差最大,自适应波束形成算法在低频率时误差较大,基于掩蔽函数的波束形成算法在电抗器主要的频段100~500 Hz处误差较小,有效的保留了原有信号特征,与原始信号的能量分布基本一致,避免了目标信号的能量衰变和低频突变的情况。
最后,如图9所示,得到电抗器本体、风扇和点晕三种主要噪声,频域特征作为声学特征,其中,本体噪声的频谱能量主要分布在100~500 Hz之间,1 000 Hz以上的能量基本为0;风扇噪声幅值范围在[-0.05,0.05]内,远远小于本体噪声幅值,且分布较为分散;电晕噪声是非连续的,电晕噪声的频谱能量主要分布于2 000 Hz以上的高频区域。
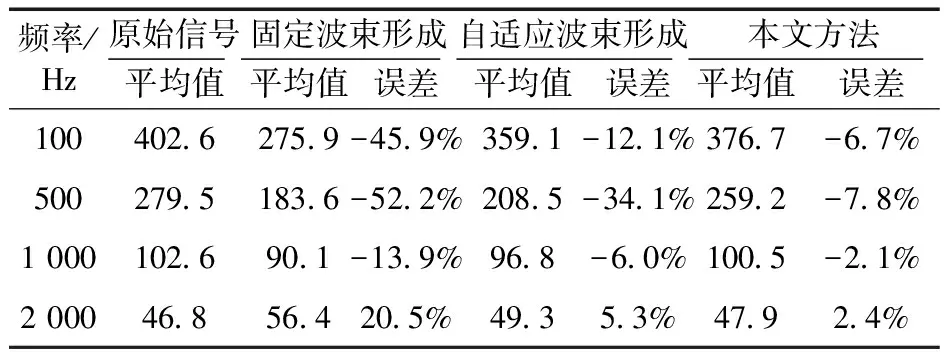
表2 不同波束形成算法功率谱密度对比

图9 单一噪声源Fig.9 Single noise source
5 结 论
本文在屏蔽室内高度还原特高压变电站并联电抗器噪声超标的实际工况,针对目标电抗器的噪声来源,基于掩蔽的波束形成算法以及欠定盲源分离算法,通过对随机噪声和麦克风阵列获得的并联电抗器附近单一噪声源,本文所得主要结论如下:
(1) 提出了一种基于掩蔽的波束形成算法,通过构造方向滤波器以及指向型波束形成系统实现对非目标电抗器信号的掩蔽过程。根据麦克风阵列的布置情况,得到了波束掩蔽图,非目标电抗器的噪声得到了有效屏蔽,掩蔽区内声音信号的特征得到了有效保留,对比固定波束形成算法和自适应波束形成算法,功率谱密度误差最小。
(2) 电抗器本体振动产生的噪声、冷却系统(风扇)和电晕噪声三种为并联电抗器的主要声源,采用单源点检测和基于K-DPC的密度聚类相结合的欠定盲源分离算法,得到了它们的时频谱图和声纹特征。
本文的研究验证了基于掩蔽的波束形成算法对目标电抗器的噪声提取的有效性,获得了电抗器周围主要噪声源的声纹图。今后的研究方向是如何将正常异常状况下的混合噪声信号进行分离,实现目标电抗器的在线检测。
