基于PID的四旋翼飞行器控制系统研究
2023-06-21黄奕陈璟汝徐琳
黄奕 陈璟汝 徐琳

摘 要:材料、动力、计算机技术的快速发展带动了无人机产业的进步。无人机按照旋翼数量可分为三旋翼飞行器、四旋翼飞行器、六旋翼飞行器以及八旋翼飞行器等,其中四旋翼飞行器结构简单功能多样,综合性能较强,在诸多领域得到广泛应用。在了解国内外四旋翼飞行器研究现状和主要控制方法及原理后,基于PID控制原理设计了四旋翼飞行器控制系统,通过数学建模和仿真实验验证了PID控制系统的稳定性。
关键词:无人机;四旋翼飞行器;PID控制算法
中图分类号:TP273 文献标识码:A 文章编号:2096-4706(2023)09-0078-04
Abstract: The rapid development of materials, power, and computer technology has driven the progress of the UAV industry. According to the number of rotors, UAVs can be divided into three rotor aircraft, quadrotor aircraft, six rotor aircraft and eight rotor aircraft. Among them, quadrotor aircraft has simple structure, diverse functions and strong comprehensive performance, and is widely used in many fields. After understanding the research status, main control methods and principles of quadrotor aircraft at home and abroad, the quadrotor aircraft control system is designed based on PID control principle, and the stability of the PID control system is verified through mathematical modeling and simulation experiments.
Keywords: UVA; quadrotor aircraft; PID control algorithm
0 引 言
四旋翼飛行器发展至今已有一百多年的历史,是一种可遥控、有四个旋翼支持飞行的无人飞行动力装置[1]。相较于国外,国内在四旋翼飞行器方面的研究起步较晚,但因为其巨大的潜在价值和发展前景,引起了很多研究人员的关注,成为现在乃至将来的热门研究方向。如今国内四旋翼飞行器控制领域的也在飞速发展,许多高校都加入到了飞行器控制领域的研究行列中。
四旋翼飞行器按照飞行器体积大小和控制方式可分为微型四旋翼飞行器,如苏黎世联邦理工大学的飞行器;小型四旋翼飞行器如宾西尼亚大学设计的HXM-4飞行器;遥控四旋翼飞行器如Draganflyer公司设计的DraganflyerⅢ飞行器[2]。
随着科技的发展,四旋翼飞行器的相关技术也越来越成熟,相比于固定翼飞行器,四旋翼飞行器不受地理因素限制,由于其体积小灵活度高,室内室外都能飞行、隐蔽性好以及垂直起降等特点,如今在军事和民用等许多领域有广泛应用,如军事方面参与侦察拍摄、目标搜索和打击[3],民用的农业方面参与喷洒农药和播种,消防方面参与火情监测、传递火情信息,气象方面进行气象监测预报气象情况,等等。
四旋翼飞行器因其强耦合,即每个模块之间都存在紧密的联系,一个模块的变化会引起其他模块跟着变化的特点;欠驱动,即控制输入量少于自由度数的特点以及非线性的特点,是非常复杂的控制系统,因此设计出兼备良好安全性和稳定性的四旋翼飞行器控制系统,保障四旋翼飞行器飞行时处于的安全和稳定的状态十分具有难度和挑战。
目前已有许多用于设计飞行器控制系统的方法,例如比例-积分-微分控制算法(PID)、基于优先级的调度控制算法(PD)、线性二次型控制算法(LQR)、反步控制法、滑模变结构控制法等,这些方法能很好地帮助飞行器实现位置、姿态控制、悬停等功能,这些方法中PID和PD控制法最经典,是应用在四旋翼飞行器中的主要方法。本文主要讨论PID控制算法,由于一般的PID控制算法对非线性系统控制效果较差,所以通常会对PID进行改进,如文献[4]设计了可抑制高频干扰的微分PID控制器,如文献[5]提出了基于反步法设计了有良好控制性能的PID非线性控制器,有如文献[6]设计了可在室内外对目标进行跟踪的模糊PID控制器。
飞行器通过旋翼控制飞行,当四个旋翼转速相同且升力和等于重力时飞行器飞行状态保持不变,旋翼转速增大或减小时飞行器可实现上升和下降,当同转向的两个旋翼速度低于另外两个转速反向旋翼转速时,四旋翼飞行器会按照转速较高的两旋翼转向旋转从而实现偏航运动,当相邻两旋翼转速高于另外两相邻旋翼转速时则可实现俯仰运动和滚转运动[7]。
文献[8]建立了飞行器数学模型,设计并验证了控制算法。本文在飞行原理上建立了飞行器动力模型,设计了相关算法并通过验证得到了相关结论。
1 四旋翼飞行器数学模型的建立
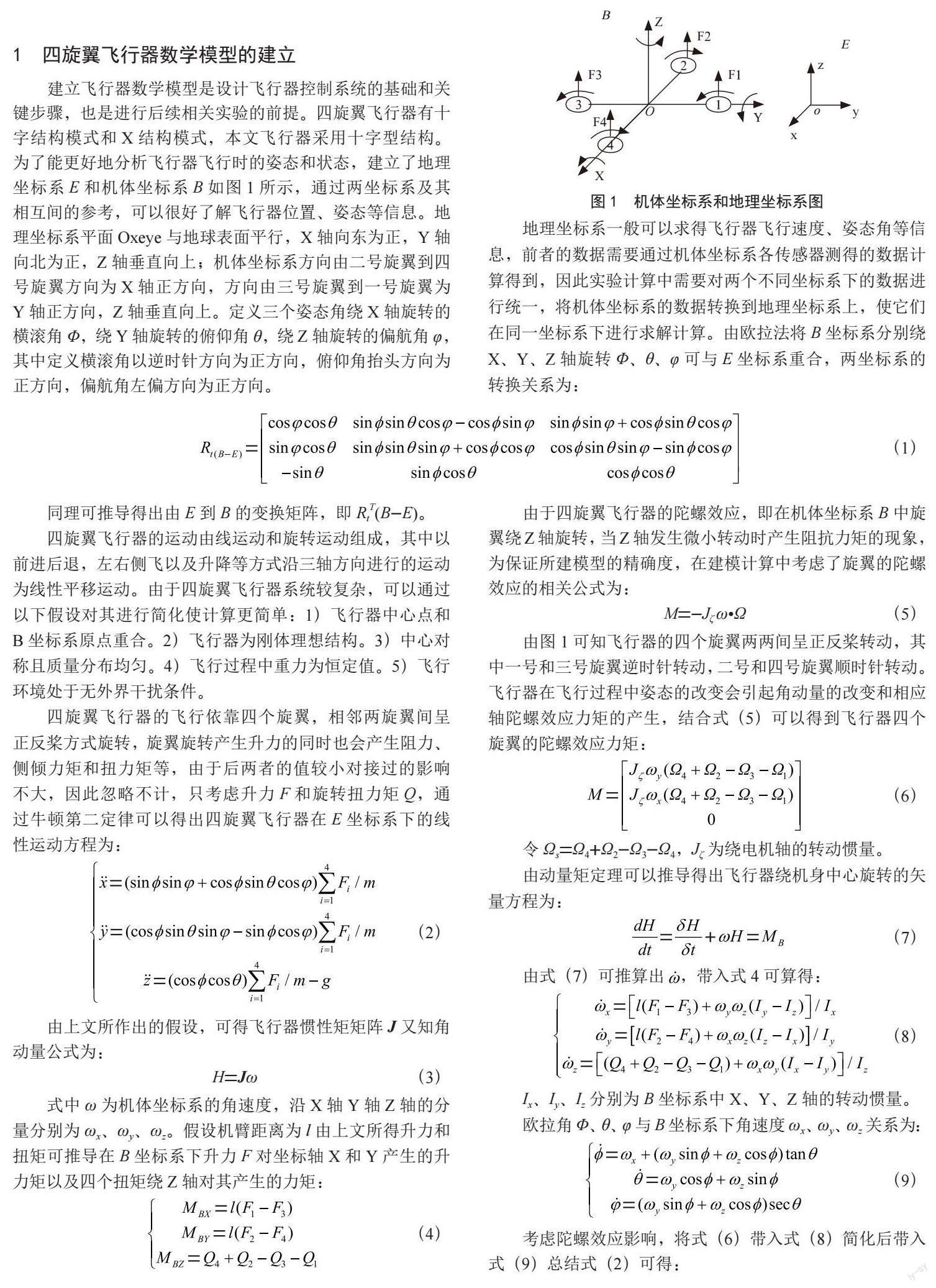
建立飞行器数学模型是设计飞行器控制系统的基础和关键步骤,也是进行后续相关实验的前提。四旋翼飞行器有十字结构模式和X结构模式,本文飞行器采用十字型结构。为了能更好地分析飞行器飞行时的姿态和状态,建立了地理坐标系E和机体坐标系B如图1所示,通过两坐标系及其相互间的参考,可以很好了解飞行器位置、姿态等信息。地理坐标系平面Oxeye与地球表面平行,X轴向东为正,Y轴向北为正,Z轴垂直向上;机体坐标系方向由二号旋翼到四号旋翼方向为X轴正方向,方向由三号旋翼到一号旋翼为Y轴正方向,Z轴垂直向上。定义三个姿态角绕X轴旋转的横滚角Φ,绕Y轴旋转的俯仰角θ,绕Z轴旋转的偏航角φ,其中定义横滚角以逆时针方向为正方向,俯仰角抬头方向为正方向,偏航角左偏方向为正方向。
地理坐标系一般可以求得飞行器飞行速度、姿态角等信息,前者的数据需要通过机体坐标系各传感器测得的数据计算得到,因此实验计算中需要对两个不同坐标系下的数据进行统一,将机体坐标系的数据转换到地理坐标系上,使它们在同一坐标系下进行求解计算。由欧拉法将B坐标系分别绕X、Y、Z轴旋转Φ、θ、φ可与E坐标系重合,两坐标系的转换关系为:
同理可推导得出由E到B的变换矩阵,即RtT(B-E)。
四旋翼飞行器的运动由线运动和旋转运动组成,其中以前进后退,左右侧飞以及升降等方式沿三轴方向进行的运动为线性平移运动。由于四旋翼飞行器系统较复杂,可以通过以下假设对其进行简化使计算更简单:1)飞行器中心点和B坐标系原点重合。2)飞行器为刚体理想结构。3)中心对称且质量分布均匀。4)飞行过程中重力为恒定值。5)飞行环境处于无外界干扰条件。
四旋翼飞行器的飞行依靠四个旋翼,相邻两旋翼间呈正反桨方式旋转,旋翼旋转产生升力的同时也会产生阻力、侧倾力矩和扭力矩等,由于后两者的值较小对接过的影响不大,因此忽略不计,只考虑升力F和旋转扭力矩Q,通过牛顿第二定律可以得出四旋翼飞行器在E坐标系下的线性运动方程为:
2 PID算法和原理
PID算法可以设计出有良好控制能力的控制器,使四旋翼飞行器的平衡等性能更好[8]。四旋翼飞行器飞行过程中,可通过飞行器上的陀螺仪、加速器等测得飞行器的飞行数据[9],这些数据经过一系列计算就可以得到飞行器飞行姿态位置等具体信息,结合这些信息可以向PID控制器输入某些信号,再由控制器将信号输出到特定的控制对象上,进而达到控制旋翼飞行器飞行状态的目的,例如PID控制系统可以将输出的信号作用与电子调速器来控制飞行器旋翼的转速等。
作为一种线性控制方法,PID控制由P(比例)、I(积分)、D(微分)三个环节组成,了解三个环节在控制系统中的作用以及三个环节各自调整系数的变化对控制系统的影响效果可以便于我们找到最佳的控制系数使系统有更好的稳定性和抗干扰能力。首先给出PID的控制图如图2所示,图中r (t)为设定值,e (t)为误差,u (t)为输出量,y (t)为被控对象实际输出值。
PID控制系统中比例环节可将误差成比例的反映出来,当比例系数较小时被控系统调整会比较缓慢,所需要的调整时间较长,这时调整曲线比较平缓但是系统会比较稳定;当比例系数较大时,虽然能够较快地达到目标值,但是系统容易振荡,不稳定。
积分环节具有记忆功能,可以用于消除静差,当积分系数较小时积分作用效果较小,当积分系数较大时积分作用较大但是系统稳定性变差。
微分环节可减弱P达到目标值过程中产生的震荡,预判误差的趋势进而做出调整,是系统的调节更高效,稳定性更好,本文就采用了PID算法来设计四旋翼飞行器的控制系统。
3 仿真实验
上文已说明PID控制系统通过调整三个环节相关系数来达到最优状态,利用软件MATLAB建模,调整相关系数对系统进行实验和仿真,可以直观地看出响应时间、超调量等指标,判断下系统的状态,通过对不同模块的参数多次的调整和仿真,最终可以找到系统处于稳态时的最优参数,得到我们想要的结果。设定实验初始姿态角(以俯仰、偏航角为例)俯仰角值为-0.3°,偏航角值为-0.2°,在零时刻,向控制系统发出信号进行仿真,仿真时间为八秒,仿真结果如图3所示。
从图3所示的曲线可以看出曲线震荡的幅值较小,在约两秒之后四旋翼飞行器的俯仰姿态就进入了0°稳定状态。图4分析曲线可以看出控制系统较稳定,经过两秒左右的时间,四旋翼飞行器偏航姿态就进入了稳定状态。
输入飞行器相关参数,已知飞行器质量1.2 kg,g=9.8 N/kg当飞行器姿态不变稳定飞行时,每个旋翼的升力如图5所示。
图5看出飞行器姿态稳定之后每个旋翼的升力都为四旋翼飞行器重力的四分之一。从三个仿真实验可以验证说明PID控制系统有良好的控制能力,对阶跃信号的静态跟踪能力很好,并且在短时间的调整后就能够使系统进入稳定状态,具有较好的稳定性能。
4 结 论
本文首先简单介绍了无人机的分类,并着重无人机中的四旋翼飞行器介绍了其发展情况、应用领域、飞行原理以及飞行器自身的一些特点等。其次本文就四旋翼飞行器控制系统介绍了几种常用的控制方法,主要讲述了其中的PID控制算法。接着本文在建立和推导地理坐标系和机体坐标系及两者之间转换关系的基础上,建立了四旋翼飞行器的数学模型,之后针对PID算法介绍了PID原理图,根据原理图分析推导了PID算法的公式并对四旋翼飞行器控制系统进行了基于PID控制算法的设计,最后本文通过MATLAB仿真实验验证了PID控制器在四旋翼飞行器姿态控制上的良好控制能力和稳定性。
参考文献:
[1] 米培良.四旋翼飛行器控制与实现 [D].大连:大连理工大学,2015.
[2] 李文巧.基于自适应PD控制的四旋翼飞行器研究 [D].重庆:重庆大学,2020.
[3] 陈仁朋,吴熠文,余加勇,等.基于无人机影像序列的城市精细化三维模型精度评估 [J].湖南大学学报:自然科学版,2019,46(11):172-180.
[4] 魏波.四旋翼飞行器稳定性控制方法研究 [D].西安:西安科技大学,2019.
[5] MIAN A A. Modeling and Backstepping-based Nonlinear Control Strategy for a 6 DOF Quadrotor Helicopter [J].Chinese Journal of Aeronautics,2008(3):261-268.
[6] RABAH M,ROHAN A,MOHAMED S A S,et al. Autonomous Moving Target-Tracking for a UAV Quadcopter Based on Fuzzy-PI [J].IEEE Access,2019,7:38407-38419.
[7] 张镭,李浩.四旋翼飞行器模糊PID姿态控制 [J].计算机仿真,2014,31(8):73-77.
[8] 李俊,李运堂.四旋翼飞行器的动力学建模及PID控制 [J].辽宁工程技术大学学报:自然科学版,2012,31(1):114-117.
[9] 茹岩,张欣.四轴飞行器控制系统设计与实现 [J].电子测试,2022,480(3):42-45+49.
[10] 张心驰.四旋翼飞行器控制系统的研究 [D].南昌:南昌大学,2018.
[11] 刘慧博,彭亮,赵旭.四旋翼飞行器姿态控制方法研究 [J].自动化应用,2020(12):4-7.
[12] 魏波.四旋翼飞行器稳定性控制方法研究 [D].西安:西安科技大学,2019.
[13] 吴森堂,费玉华.飞行控制系统 [M].北京:北京航空航天大学出版社,2005.
[14] 吴中华,贾秋玲.四旋翼几种控制方法研究 [J].现代电子技术,2013,36(15):88-90+94.
[15] 张洪涛.四旋翼微型飞行器位姿及控制策略的研究 [D].哈尔滨:哈尔滨工业大学,2014.
作者简介:黄奕(2002—),女,汉族,四川成都人,本科在读,研究方向:飞行器制造。
