电动助力转向系统力学特性的研究
2023-02-14周精浩冯军徐明刘智斌吴成伟
周精浩,冯军,徐明,刘智斌,吴成伟
吉利汽车研究院(宁波)有限公司,浙江宁波 315000
0 引言
乘用车转向系统的发展历经纯机械转向系统—液压助力转向系统—电动助力转向系统3个阶段[1],目前已全面进入电动助力时代。根据助力形式的不同,电动助力转向系统可分为转向轴助力式、单齿轮助力式、双齿轮助力式、带传动单齿条助力式4种[2]。选择助力形式的一个关键因素是最大齿条力等力学特性参数,因此转向系统的力学特性分析对电机选型至关重要[3]。目前对于转向系统的研究大都聚焦于转向控制的策略,对于力学特性特别是齿条力的实车测试方面的分析还比较少。
本文首先对转向系统的助力特性进行了分析,继而通过理论和实测两种方式对转向系统原地转向最大齿条力进行了计算和测试[4-5],最后利用电机特性与负载分离法对转向助力电机进行选型和校核。
1 转向系统助力特性分析
1.1 原地转向阻力矩
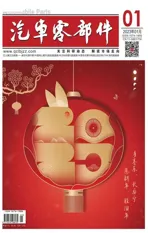
车辆在原地转向时需要克服地面和轮胎之间的摩擦阻力矩,此时系统所需的转向力矩最大,轮胎与地面的摩擦阻力受到轮胎气压、前轴载荷、路面摩擦特性等众多因素影响,现有的车辆动力学模型还难以精确计算,根据经验公式可以估算原地转向阻力矩:
(1)
式中:Mδ为原地转向阻力矩(N·m);f为轮胎和路面间的滑动摩擦因数,一般取0.65~0.75;G0为前轴载荷(N);p为轮胎气压(MPa)。
图1给出了不同胎压值下车辆原地转向阻力矩随前轴载荷的变化曲线,可知车辆的原地转向阻力矩随胎压的降低而增大,随前轴载荷增大而增大。
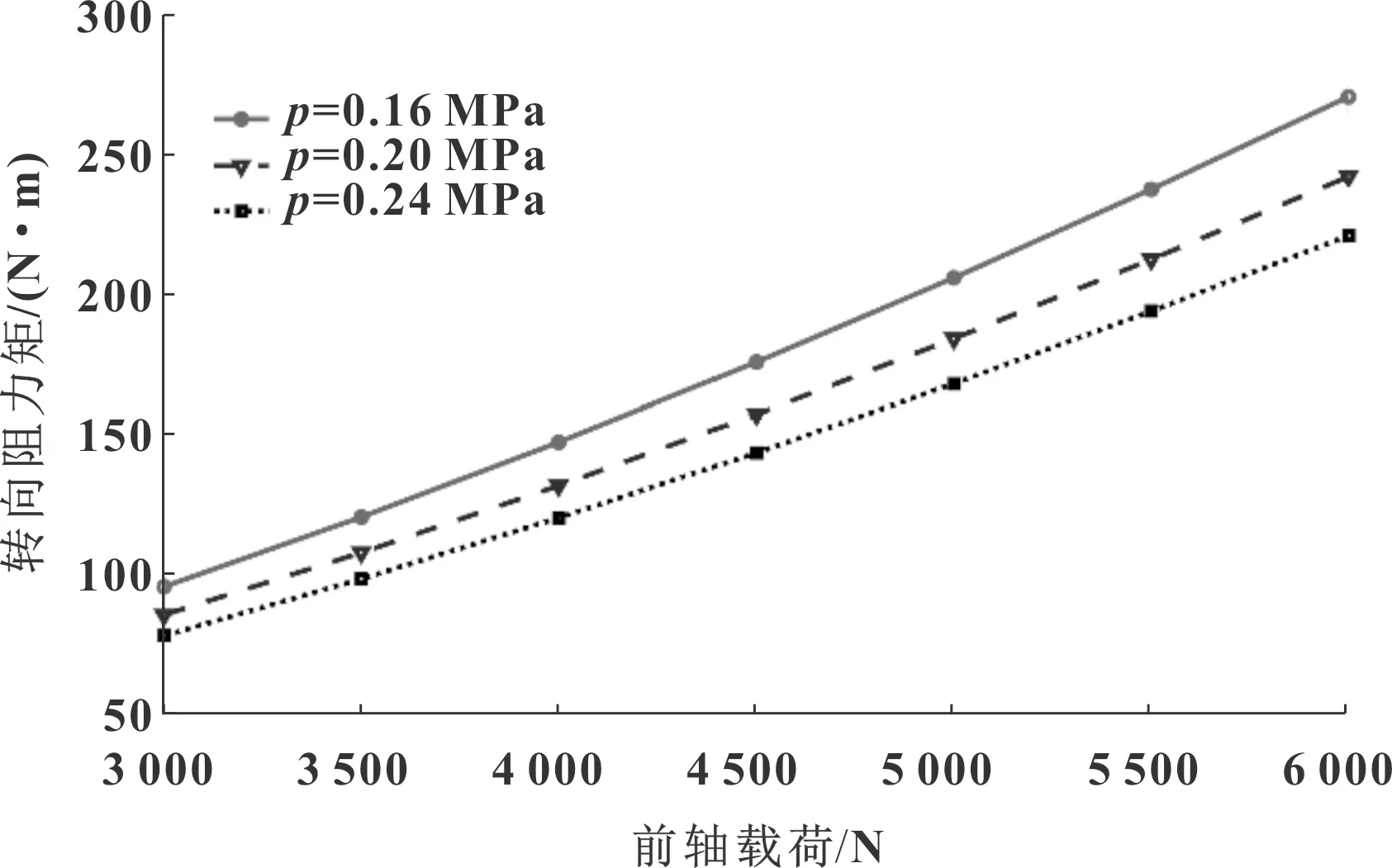
图1 不同胎压值下车辆原地转向阻力矩随前轴载荷的变化曲线
1.2 车辆行驶转向阻力矩
当车辆从原地起步后,轮胎和地面间的摩擦阻力矩由静态变为动态,转向阻力矩减小,回正力矩逐渐增大并开始成为主要阻力矩因素。回正力矩主要由侧向力回正力矩、重力回正力矩和纵向力回正力矩组成。其中侧向力回正力矩主要与轮胎拖距和主销后倾有关,是车辆在高速转向时需要克服的主要转向阻力矩。回正力矩可通过车辆的轮胎模型和悬架动力学模型来计算,简化的轮胎和悬架动力学模型如图2所示。

图2 简化的轮胎和悬架动力学模型
由侧向力产生的转向阻力矩为:
MS=FY(rT+rP)
(2)
式中:MS为由侧向力产生的转向阻力矩;rT为主销后倾拖距;rP为轮胎拖距;FY为侧向力。
由重力产生的转向阻力矩可表示为:
(3)
式中:MG为由重力引起的转向阻力矩;rC为车轮中心到主销的内移量;σ为主销内倾角;δ为前轮转角。
由纵向力引起的转向助力矩计算公式为:
MZ=(Ffl-Ffr)·rC
(4)
式中:MZ为由纵向力引起的转向阻力矩;Ffl为左侧转向轮纵向力;Ffr为右侧转向轮纵向力。
一般Ffl和Ffr相差较小,因此纵向力引起的回正力矩可忽略不计。
1.3 稳态圆周行驶方向盘力矩
对于电动助力转向的车辆来说,当方向盘在中间位置附近时,提供较小的转向助力可以使司机获得较强烈的转向中心感,随着侧向加速度的增大,方向盘力矩和电机助力矩也会增大,但方向盘力矩的增长梯度应保持恒定甚至降低。实际上对于同一车辆,方向盘力矩是分布在很大范围内的,为了获得舒适的转向感觉,还需要讨论在稳态圆周行驶工况下方向盘力矩与其他参量的关系。
在不考虑重力和纵向力引起回正阻力矩的工况下,通过引入转向助力系数AS和转向系角传动比iS,稳态圆周行驶工况下方向盘力矩MH的计算公式如下:
(5)
此时侧向力可表示为:
FY=mFaY
(6)
式中:mF为前桥质量;aY为侧向加速度。
结合公式(2),方向盘转矩可以表示为:
(7)
当方向盘力矩具有线性特性时,车辆的主观转向较为舒适和谐,因此转向助力系数应和侧向加速度之间呈线性关系,通过引入回正系数CA、基本助力量DA和缓增系数KA,转向系统助力系数AS可表示为:
CA=mFr/iS
(8)
(9)
式中:CA为回正系数,即车辆的回正能力,与车辆结构参数有关,但与侧向加速度无关;DA为基本助力量,即梯度系数,表示转向盘力矩从中位开始增加的剧烈程度;KA为缓增系数,即转向盘继续转动时转向盘力矩缓增的剧烈程度,表示转向盘力矩随侧向加速度增加而增加的程度。
转向助力系数随侧向加速度的变化曲线如图3所示。
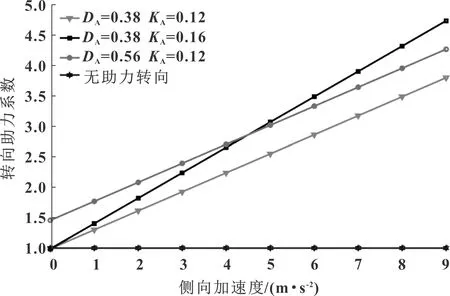
图3 转向助力系数随侧向加速度的变化曲线
传统机械转向系的转向助力系数为1,此时系统为无助力系统,假设总拖距不变,对于无助力的转向系统,转向盘力矩和侧向加速度的梯度均为定值,侧向力的变化与方向盘力矩的变化成正比关系;对于有助力转向系统,转向助力系数不为1。稳态圆周行驶工况下,无助力和有助力的方向盘力矩随侧向加速度的变化曲线如图4所示。

图4 无助力和有助力的方向盘力矩随侧向加速度的变化曲线
可知对于有助力的转向系统,随着侧向加速度的增大,方向盘力矩缓慢增加,驾驶员可以得到很好的驾驶感受;而在无助力工况下,方向盘力矩直线上升,转向手力沉重。
2 转向系统齿条力的计算和测试
2.1 转向系统的齿条力计算
前面已经对转向系统的阻力矩进行了分析,其中原地静态转向的齿条力最大,因此在转向系统齿条力测试时仅对原地转向工况进行校核。
静态原地转向时作用于转向盘上的力为:
(10)
式中:Mδ为原地转向阻力矩;Fk为作用于转向盘上的力;R为方向盘半径;α为转向梯形角;η为转向器效率,一般取70%~80%;ic为齿轮齿条转向系统的传动比。
转向系统的齿条力为:
(11)
式中:r为转向器主动小齿轮节圆半径;θ为齿轮齿条轴夹角;i为齿轮齿条转向系统的力传动比(R/r)。
联立公式(1)、(10)、(11)即可得到转向系统的齿条力。
以某品牌某车型为例,取胎压为0.23 MPa、地面摩擦因数为0.7、齿轮齿条线转向系统角传动比为18.67,转向器效率为75%,方向盘半径为185 mm,转向梯形角为87.6°,转向器主动小齿轮节圆半径为7.97,齿轮齿条轴夹角为20°。转向系统齿条力随前轴载荷的变化曲线如图5所示。
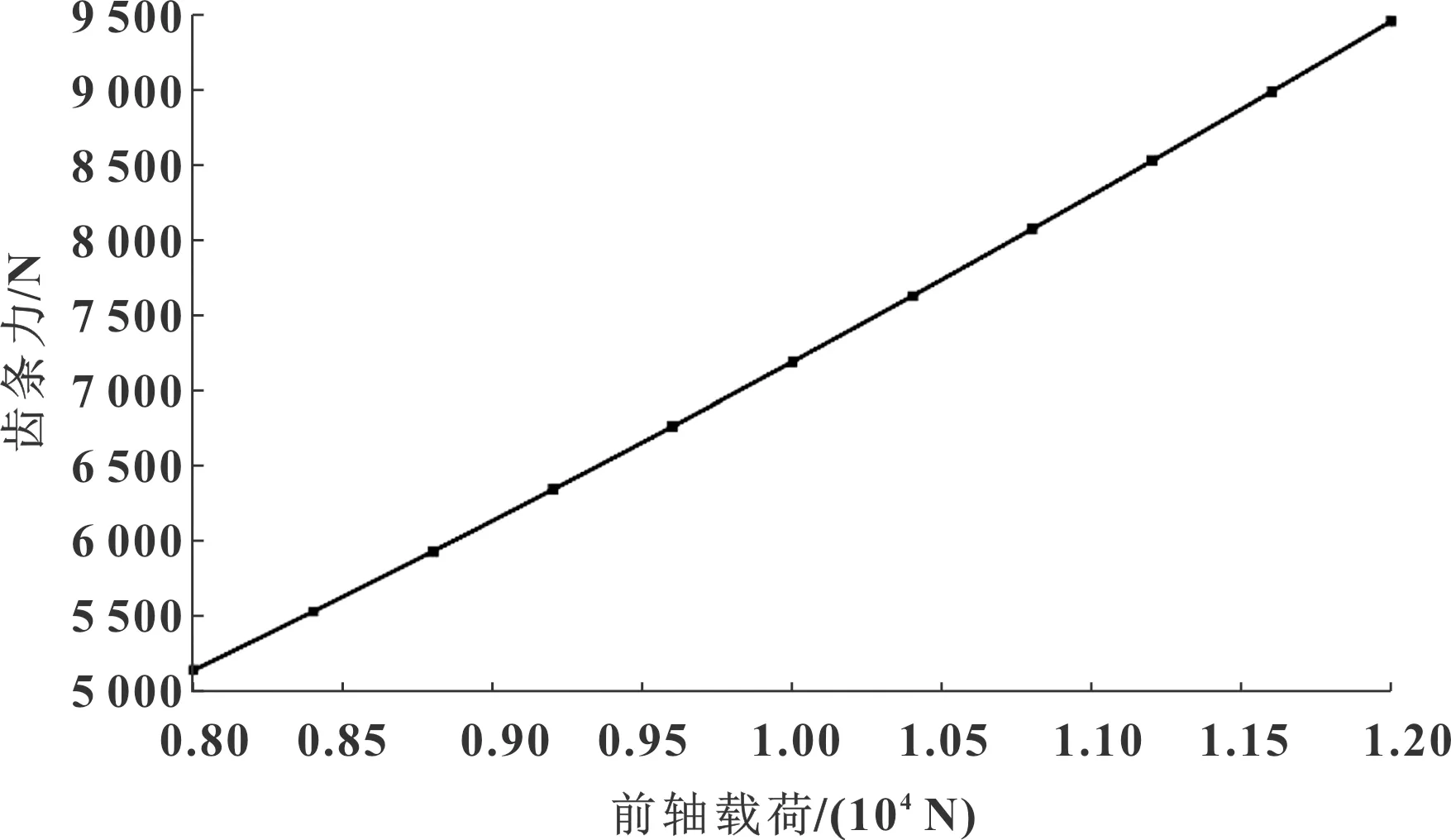
图5 转向系统齿条力随前轴载荷的变化曲线
由图5可知,转向系统的原地转向齿条力随前轴载荷的增大而增大,且两者有较为明显的线性关系。
2.2 转向系统的齿条力测试
转向系统齿条力采用拉力传感器进行测试,在测试之前需要对转向机的拉杆进行改制,根据传感器数模,校核下齿条行程内(上下跳)不产生干涉的可布置位置的内拉杆的相关尺寸,如图6所示。
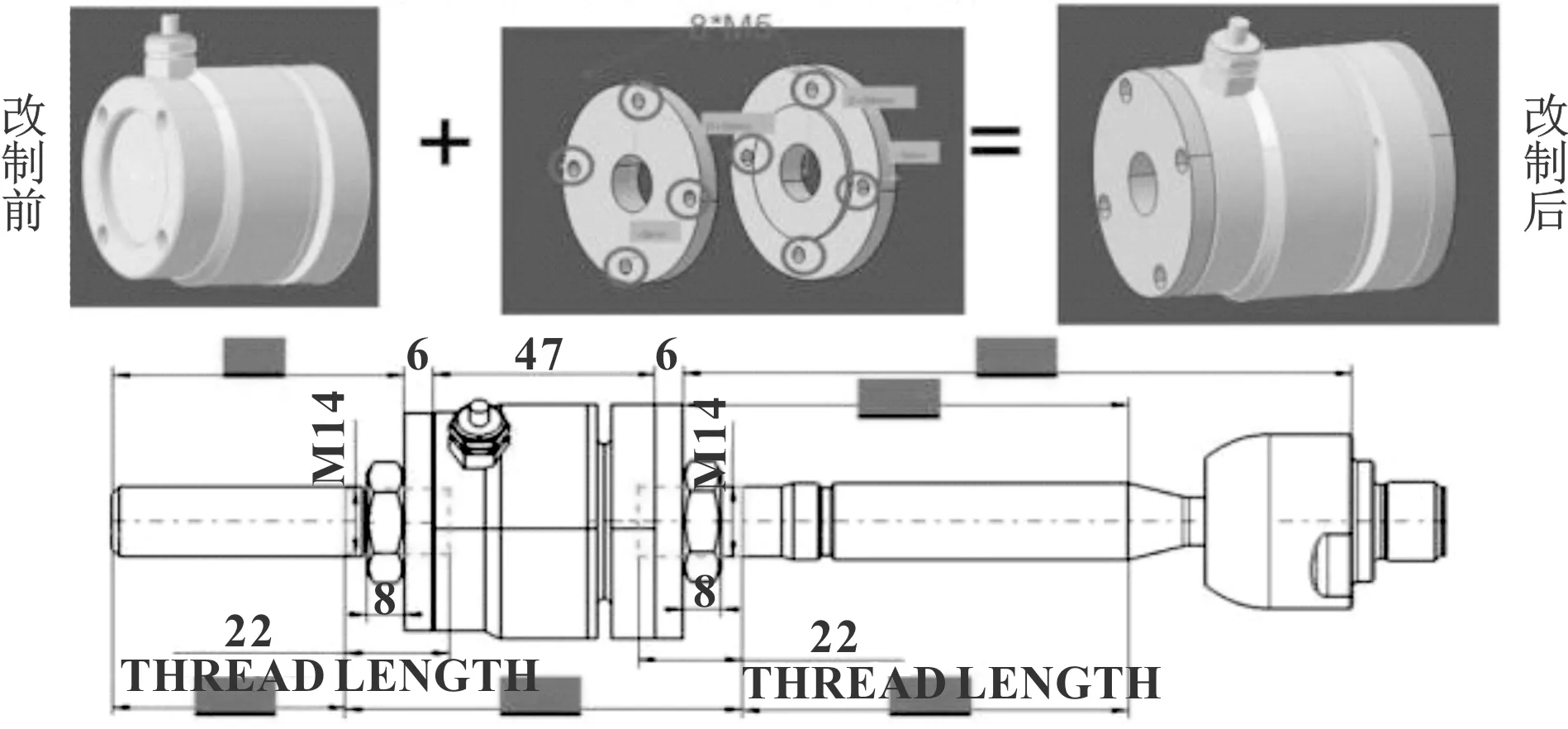
图6 转向机拉杆改制示意
经过校核传感器端面距离拉杆卡槽(防尘罩小端)70 mm处时可以进行拉杆力测试,但是这个位置在整车下调极限位置(举升状态),向两侧打方向到极限位置时会产生干涉,在车辆过程中需要注意,不能在车辆举升状态时将方向左右打死,该位置可以满足测试要求。
车辆转向时不同车速下齿条力的大小也不相同,但0 km/h的原地转向工况齿条力最大,因此齿条力测量和电机选型都是基于原地转向的工况进行的,此外其他相关测试工况如下:测试路面为平坦的柏油路,天气晴朗,测试地点选择在盐城中汽研试验场,测试轮胎规格为225/55 R18并进行四轮定位标定,4个轮胎胎压均为0.22 MPa,测试方法为原地打方向盘从中间位置—向左至末端—向右至末端—向左至回正位置。在前轴质量分别为967、1 057、1 082、1 152、1 192 kg 5种载荷下的最大齿条力分别为7 987、8 594、8 767、9 260、9 547 N,最大齿条力随前轴质量的增大而增大,进一步地得出了原地最大齿条力和前轴质量之间的关系曲线如图7所示。

图7 原地最大齿条力和前轴质量之间的关系曲线
由图7可知,同理论计算结果一致,转向系统的最大原地转向齿条力和前轴质量有着良好的线性关系,根据线性拟合,原地转向最大齿条力和前轴质量之间的关系式为:
Fmax=6.93x+1 286
(12)
式中:x为前轴质量;Fmax为原地转向最大齿条力。
综上,在新车型的转向系统选型中,对于同平台硬点相同的车型系列,可以通过测试部分载荷下的齿条力去估算其他配置载荷下的齿条力,从而指导电机的选型工作,这样可以大大节省测试时间和测试精力。
3 转向助力电机的选型
电动助力转向系统的运动较为复杂,对反应的灵敏度要求较高,其选型是否得当直接关系到整个控制系统的运行效果和机械寿命。通常情况下,在选用助力电机时,要在能满足规定齿条力要求和控制要求的基础上,优先选择体积小、质量轻、价格便宜、功耗低的电机[6-7]。常用的电机选型方式有两种:一是直接将电机峰值功率作为电机选型的重要依据,但这种方法偏差较大,不适用于大都在非最大功率运行的转向电机选型;二是将电机特性与负载特性分离,并用图解的形式表示,这种选型方式,让整个电机选型过程更加简洁,本文采用第二种方案进行电机选型。
根据项目组对前轴载荷950 kg的输入,并对计算结果向上圆整,得到原地转向最大齿条力为7 900 N,本次开发的电动助力转向管柱总成选择12S8P无刷同步电机,工作电压为12 V,电压常数Ke为5.25×10-3V·min/r,电机常数Kt为0.041 Nm/A,峰值电流为113 A,最大输出力矩为4.6 Nm,电机功率为592 W,母线电流为80 A,电机外特性曲线如图8所示。
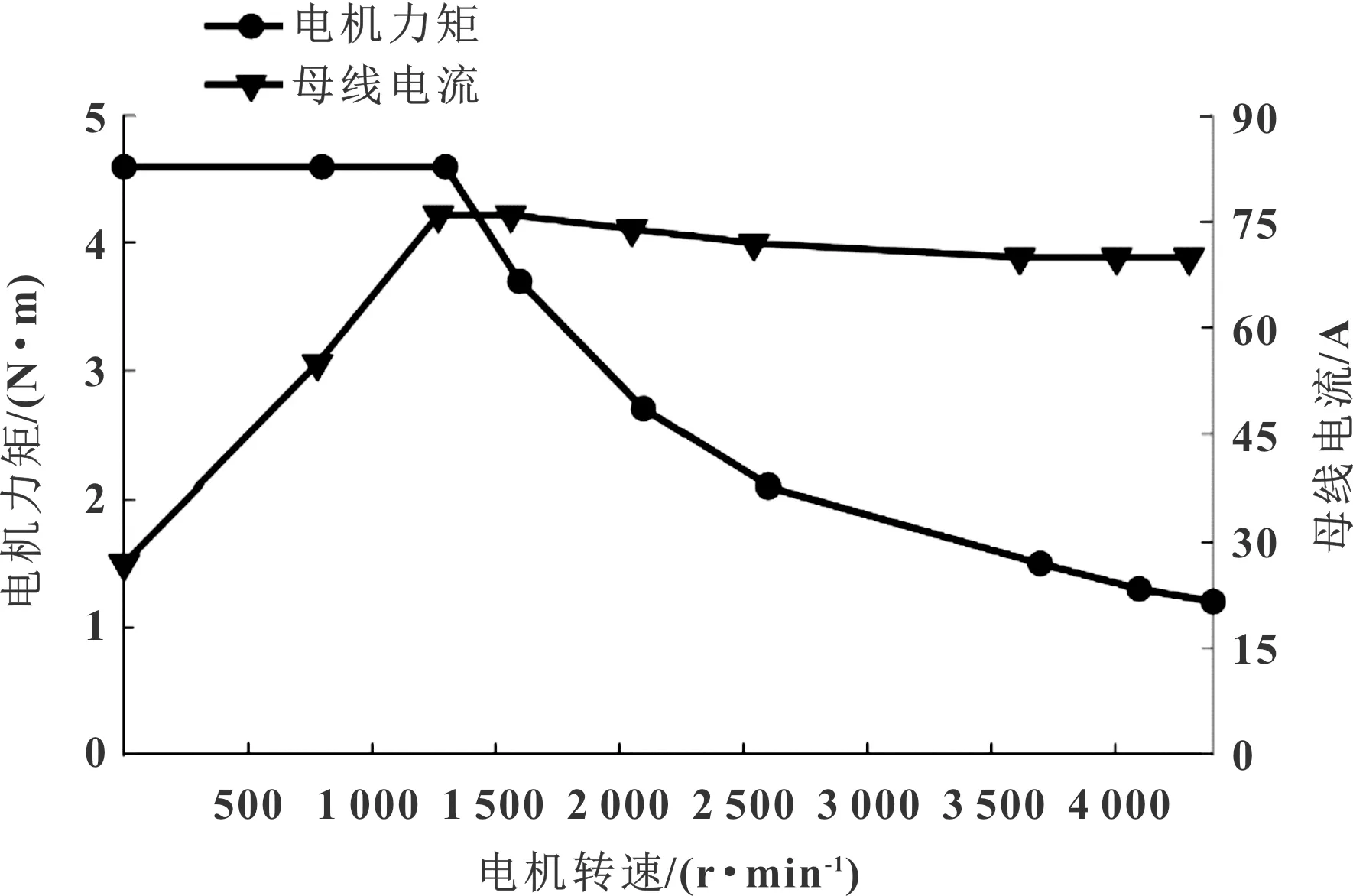
图8 电机外特性曲线
电机能力校核本质上是转向系统所需助力和电机所能提供扭矩之间的对比。根据齿条力7 900 N、线角传动比54 mm/r、转向器行程150 mm、减速比20.5、蜗轮蜗杆效率85%、机械效率98%,以及属性部门对原地静态转向、自动泊车工况、城市低速工况、高速紧急工况下设置不同的方向盘转速和最大齿条力的输入,对某型最大助力矩4.6 Nm的电机进行校核。
在已定工况和最大齿条力的情况下,转向系统所需助力扭矩为:
(13)
式中:T1为转向系统的需求助力;Fn为对应工况下的齿条力;in为转向机的线角传动比;Fs为手力。
根据对应工况下的方向盘转速,可以通过电机N-T曲线求得电机最大助力扭矩。
T2=Td×iw×η1×η2
(14)
式中:η1为蜗轮蜗杆的效率;η2为系统的机械效率;T2为转向系统所能提供的助力扭矩;Td为助力电机最大输出扭矩;iw为转向管柱的蜗轮蜗杆减速比。
据此在环境温度为23 ℃下对助力电机的特性进行校核,得到方向盘转速为900、750、650、540、500、360、350、180(°)/s时,转向系统所需的助力矩和电机所能提供的助力矩,其校核曲线如图9所示。
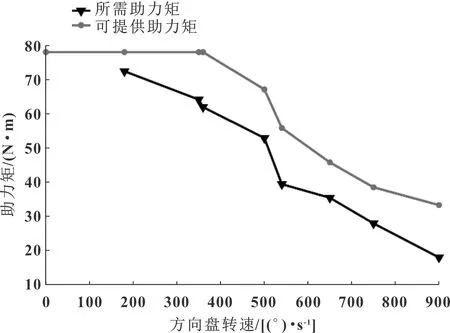
图9 转向电机助力矩校核曲线
由图9可以看出,电机所能提供的力矩均大于转向系统所需要的力矩,该转向电机满足设计要求。
4 结束语
本文对电动助力转向系统的电机选型流程进行系统分析,首先对转向系统的原地转向阻力矩、车辆一般行驶工况转向阻力矩和稳态圆周形式3种工况下的转向阻力矩进行分析和研究,阐明了电动助力转向系统助力特性,接着给出了理论分析和实车测试两种齿条力方案,结果均表明原地转向齿条力和前轴载荷之间存在近似线性关系。接着就某一前轴载荷下,最大7 900 N的齿条力的转向系统进行电机校核,结果表明所选电机符合助力需求。