基于多信息源融合的国六重型柴油车OBD-Ⅲ系统设计
2023-01-09俞妍庞海龙卜建国雷威张衡
俞妍,庞海龙,卜建国,雷威,张衡
(1.陆军军事交通学院军用车辆工程系,天津 300161;2.东风商用车技术中心,湖北 武汉 430056)
通讯作者:庞海龙(1977—),男,教授,研究方向为柴油机排放后处理、等离子体应用设计;felixespfr@163.com。
近年来,我国机动车污染物排放标准逐步升级,2018年发布的《重型柴油车污染物排放限值及测量方法(中国第六阶段)》中明确规定,车辆应装备远程排放管理车载终端,即在实现全部OBD-Ⅱ功能的基础上增加无线通信装置的OBD-Ⅲ,将采集的车载信息结合数字地图,传送到远程服务器进行诊断和统一管理[1-2]。目前,OBD-Ⅲ数据采集系统主要是通过OBD诊断结构采集数据,但是汽车制造商并不会将大量数据发送至OBD诊断接口上供人随意读取,缺少对车辆的全面了解[3]。本研究基于国家重点研发计划“柴油机排放后处理系统集成及OBD技术研究”,设计并研制了基于多信息源融合的国六重型柴油车OBD-Ⅲ远程监控系统,采取多源信息融合的方法采集传感器节点、发动机动力CAN、车辆OBD诊断接口的数据,信息更全面。目前,该系统已经在不同的重型柴油车上示范运行了10万 km,采集数据样本近9 000万条,其中包含6万条传感器数据。并且采集的数据与便携式排放测试系统(Portable Emission Measurement System,PEMS)实测数据基本一致,为相关部门进行车辆信息化监测、诊断服务提供了重要的技术支持。
1 OBD-Ⅲ系统总体结构设计
OBD-Ⅲ系统的工作过程可以分为数据实时采集、无线传输和远程监控三部分[4]。车载数据采集终端通过与传感器节点、发动机动力CAN、车辆OBD诊断接口通信,读取车辆状态参数、排放数据和故障信息等。车辆行驶时,将通过终端读取的车辆信息与GPS模块获取的车辆位置信息形成数据包,利用移动互联网以TCP的方式把数据传输到远程的服务器上,并将信息存储到数据库[5-6]。通过终端APP或者网页的形式连接远程服务器,实现数据的远程访问[7]。图1示出重型柴油车OBD-Ⅲ系统的总体设计方案。
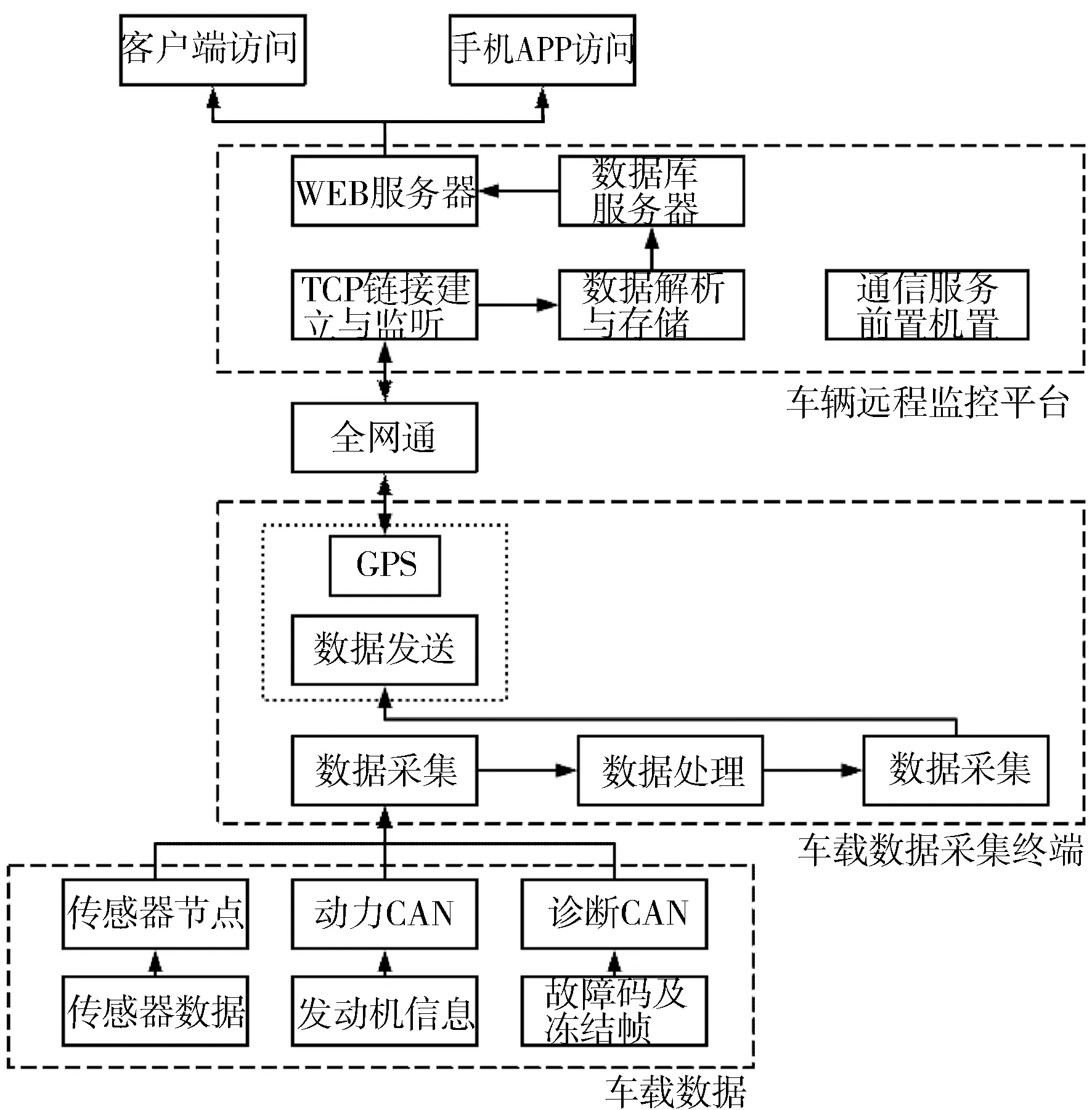
图1 重型柴油车OBD-Ⅲ系统总体方案
车载数据采集的拓扑结构及信息流动过程可以表述为
O={S,Ls,Lp,Ld,G}。
(1)
式中:O表示车载数据采集终端;S表示传感器集合;Ls表示传感器线束集合;Lp和Ld分别表示动力CAN与OBD诊断接口集合;G表示OBD诊断接口网关。
传感器Si通过测量得到车辆的实时数据,再经过传感器线束集合Ls传输至车载数据采集终端O,故障码等信息会被发送到Ld上与OBD诊断接口实现传输,ECU数据流信息通过动力CAN总线Lp传输。具体的传输过程见图2。

图2 车载数据采集的信息流动过程示意
OBD-Ⅲ系统通过不同的诊断模式对OBD诊断接口发送相应的请求,通过模式02获取冻结帧,通过模式03读取故障码,通过模式09请求车辆信息等[8],具体诊断模式见表1。

表1 OBD的9种诊断模式
2 系统构成
2.1 系统硬件设计
系统硬件组成见图3。

图3 系统硬件组成
1) 中央控制模块
考虑到重型柴油车的OBD诊断接口为CAN通信,因此远程监控系统终端选用工作稳定可靠的32位STM32H743XIH6车用级芯片。它拥有两路FDCAN通道,9个UART控制模块,以及SPI、I2C等通信接口和丰富的I/O资源,CPU频率可达480 MHz。这些特性能够很好地满足需求,对于构建终端设备的稳定性、实时性有很好的效果。
2) 模拟信号采集模块
本研究安装LCO152T加速度传感器采集发动机振动信号。选用AD7768-4BSTZ芯片,提供ADC采集。振动传感器输出的信号为峰峰值10~60 mV的电压信号。
3) CAN通信模块
国Ⅵ柴油车OBD诊断接口基本采用CAN通信,本控制器设计了两路CAN数据采集,一路采集OBD接口的诊断CAN数据,一路采集OBD接口的动力CAN数据。选用PCA82C250为CAN收发器芯片,电路原理图见图4。
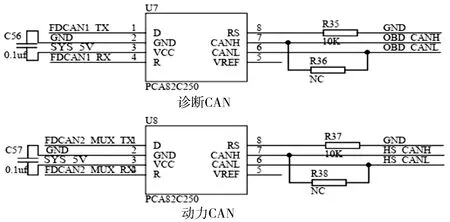
图4 CAN通信模块
4) 无线通信模块
根据系统的数据量以及链路需求速率,数据传输模组选用FG150。FG150是一款集成了GNSS定位和北斗导航的基于全网通(包括5G)的无线模块产品。FG150支持移动、联通、电信三大运营商无线网络,可实现四网无缝衔接;支持上下行非对称数据传输,上下行数据传输速率可达到2.5 Gbps,具有流量大、功耗低、信号强的优点。
2.2 系统软件设计
2.2.1 不同频率数据采集的融合设计
对于与排放关联密切的车辆状态信息需要以1 Hz的固定频率进行采集,车辆的故障码和冻结帧等信息由于出现频率较低,可以实行周期性采集,而车辆的识别信息如车辆识别号码(Vehicle Identification Number,VIN)等可采用一次性采集的方式[9]。传感器采集的信号比如发动机的振动信号为实时数据,需要以10 kHz的频率进行采集。
根据不同的采集频率,可以将OBD-Ⅲ系统采集的数据集D描述为
D={Ds,Df,Dp,D0}。
(2)
式中:Ds表示按照10 kHz频率快速采集的传感器数据集;Df表示按照1 Hz频率采集的动力CAN数据集;Dp表示周期性采集的诊断接口数据集;D0为车辆一次性采集的数据集。
汽车发动机很多故障可以通过振动信号故障特征提取进行诊断。本研究在发动机曲轴外部连接杆上安装加速度传感器,以10 kHz的采样频率采集曲轴振动信号。将采集的振动信号进行傅里叶变换,得到相应的频域数据[10]。选择变换窗口为1 s,傅里叶变换计算方法为

(3)
式中,连续傅里叶变换将平方可积的函数f(t)表示成复指数函数的积分或级数形式;F(ω)为f(t)的像函数,f(t)为F(ω)的原函数,原函数和像函数构成一个傅里叶变换对。
根据动力CAN采集的发动机转速信息和气缸个数,提取振动信号基频及其相应的与故障相关的频段,为判断发动机抱轴、曲轴断裂等故障提供数据信息[11]。
2.2.2 基于状态机的数据传输机制
传统的过程控制流程基本是顺序执行的,这种控制测量对于处理外部突发事件的能力较弱,容易出现丢数的现象。本研究采用有限状态机模型(见图5)来实现数据传输控制。模块通过UART接口与单片机进行通信,单片机通过发送AT指令来控制模块建立和断开网络连接,将采集融合后的车载数据打包进行逐秒可靠发送。

图5 基于状态机的数据传输控制
2.3 远程监控平台
远程监控平台采用B/S架构,即浏览器/服务器架构,浏览器即是客户端,用户通过浏览器登陆使用系统,无需进行其他安装配置。该平台运行界面见图6。

图6 远程监控平台运行界面
监控平台主要对车辆、车载数据采集终端、用户、厂商和排放管理部门5种实体对象及其联系进行存储管理,数据库设计概念可利用E-R图来描述(见图7)。

图7 远程监控平台数据库E-R图
3 试验对象及测试仪器
试验选取了4辆某型国Ⅵ重型柴油车,其上安装了自行设计的远程OBD-Ⅲ系统,在内蒙古牙克石进行了实际道路试验。
试验车辆安装便携式排放测试系统PEMS进行行驶数据采样。PEMS设备选用Horiba OBS-one,主要由气体测量模块、PN测量模块、排气流量计、GPS系统、主机、电源等部分组成[12]。
4 数据处理及方法
图8示出部分OBD-Ⅲ系统获得的NOx传感器浓度与PEMS仪器测得的NOx浓度的逐秒精度对比。由图8可以看出,虽然二者在逐秒对比时存在一定程度的误差,但决定系数计算结果高达0.84,说明OBD-Ⅲ系统获取的数据与PEMS测量结果有较强的线性关系,在整体变化趋势上是一致的。

图8 远程OBD与PEMS的瞬时NOx浓度对比
4.1 利用滑动平均法计算NOx排放
对于N个动态测试数据{yi},不断逐个滑动地取m个相邻数据作加权平均来表示平滑数据,其一般算式为
(4)
这些参数的不同取法就形成不同的滑动平均方法。使用滑动平均法对OBD-Ⅲ系统获取的NOx传感器浓度进行处理,选取滑动平均窗口m分别为60 s,120 s,300 s时远程OBD数据与PEMS数据之间的相对误差(见图9)进行分析[13]。可以看到,经过滑动平均法处理后相对误差大幅减少,在滑动平均窗口为60 s时,相对误差波动除个别工况点以外已经稳定在20%以内,将窗口增加至120 s时,整体波动范围已不足10%。结果表明,未经过滑动平均法处理时,直接使用逐秒数据进行在用车的实际道路排放水平监测存在一定程度的误差,而滑动平均法处理能够降低OBD-Ⅲ数据与PEMS数据的相对误差,增加数据间的一致性。
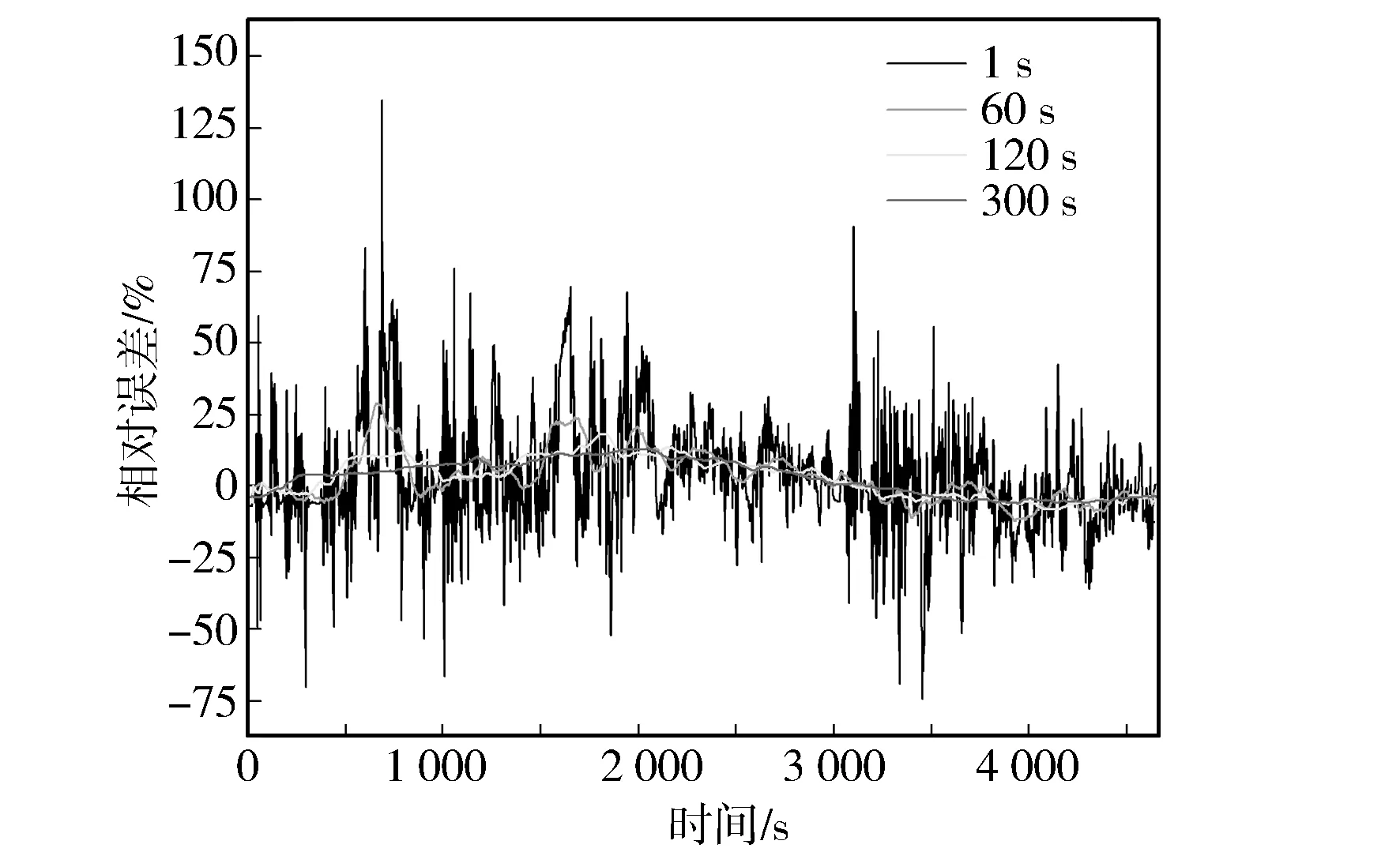
图9 远程OBD与PEMS的相对误差对比
4.2 试验结果
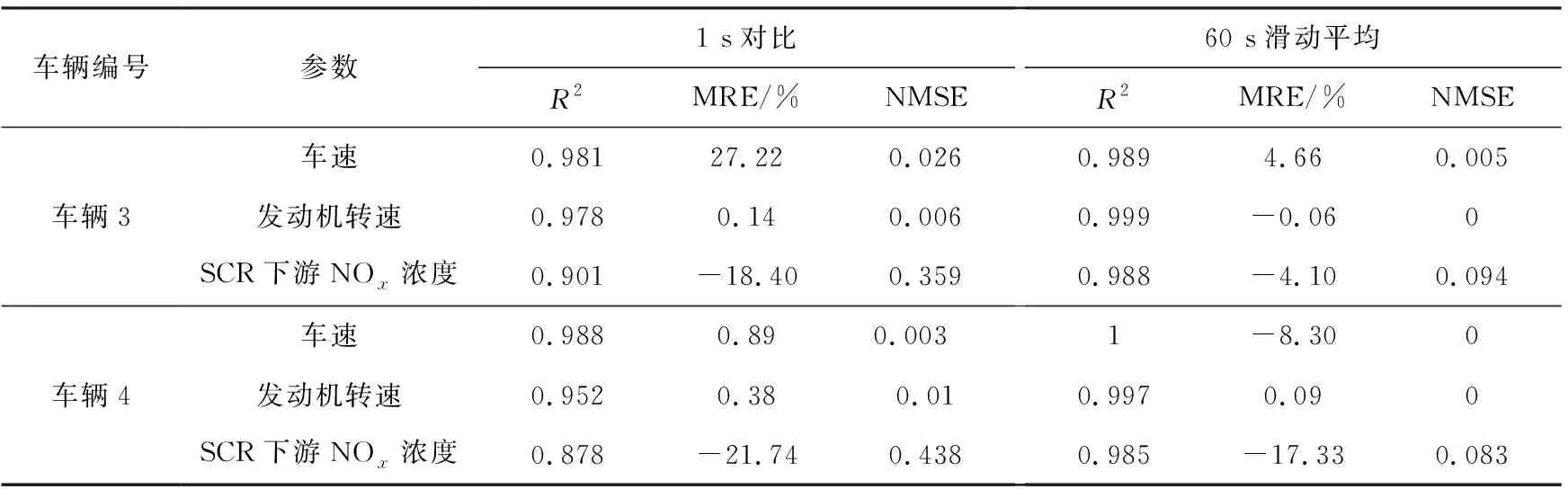
除了NOx浓度之外,还采用同样的方式评估了其他重要参数通过OBD-Ⅲ和PEMS获取时的差异,包括车速和发动机转速。计算这3个变量的决定系数、平均相对误差(Mean Relative Error,MRE)和归一化均方误差(Normalized Mean Square Error,NMSE),结果见表2。

表2 OBD-Ⅲ与PEMS数据对比
续表
计算结果表明,在进行逐秒对比时,OBD-Ⅲ与PEMS测得的发动机转速、车速显示出了高度的一致性,决定系数R2都超过了0.95,平均相对误差和归一化均方误差也都较低,说明OBD-Ⅲ数据与PEMS数据在这两项参数上基本完全吻合。与此相对应的,NOx浓度在逐秒对比时平均相对误差保持在±25%以内,同时数据间有着很强的相关性(R2基本介于0.8~0.92之间)。通过延长时间序列,OBD-Ⅲ与PEMS数据之间的相关性都有了不同程度的提高。
5 结论
a) 通过设计基于多信息源融合的重型柴油车远程监控系统,搭建传感器节点,采集传感器节点、发动机动力CAN、车辆OBD诊断接口的数据,并使用多源信息融合的方法提取有效特征参数,将数据按照国六法规的要求逐秒发送至服务器,数据可靠详尽,为后续开展故障诊断、故障预测、排放监管等提供技术支撑;
b) OBD-Ⅲ系统获取的数据经滑动平均法处理后,与PEMS测量的数据具有较高的一致性,大大提高了评估结果的可靠性;OBD-Ⅲ系统能够弥补遥测方式精确度不高和PEMS方式覆盖面小的缺陷,具有实现大样本车辆的高精度排放监测的潜力;
c) 提出了基于有限状态机的数据传输机制,比起传统的顺序控制流程,基于有限状态机的数据传输机制处理外部突发事件的能力强,可有效解决丢数的现象。
