水下声探测系统载体振动干扰分析及抑制方法*
2022-12-02谭思炜张静远
唐 波,谭思炜,张静远
(海军工程大学 兵器工程学院, 湖北 武汉 430033)
微多普勒技术在水声探测领域的研究和应用,为水下目标的检测和识别提供了新的途径和方法[1-2]。通过分析目标微动部件的回波信号,提取微多普勒特征,可以获得目标微动部件的物理以及运动特征,可以此进行目标检测、特征识别和分类[3-5]。
受水流以及自身运动机构的影响,除了预期的运动之外,水声探测系统随着载体的无规律振动会作为一种干扰信号叠加在回波信号当中,导致回波信号微多普勒特征谱偏差。因此,抑制载体振动干扰是水下目标微多普勒特征提取中必须考虑的问题[6]。
关于微多普勒效应的文献中,一部分研究目标微多普勒特征提取[7-12],一部分研究特征参数解算方法[13-19],一部分研究在目标探测识别中的应用[20-22]。只有文献[23]中分析了平台振动对微多普勒谱的影响,然而文献中只进行了分析和数值仿真,并未给出抑制方法。
针对该问题,文中提出一种针对目标微多普勒特征谱的抑制探测系统平台振动干扰的方法,该方法首先在数学上从复杂的信号加干扰的表达式中分离出干扰成分,然后乘以干扰共轭信号来消除该干扰。
1 水下载体振动干扰分析
假设声探测设备发射频率为fc的单频连续波信号[24],则发射信号可表示为
st(t)=exp(-j2πfct)
(1)
考虑水下目标的典型微运动——螺旋桨的旋转运动,水下声探测设备与螺旋桨的空间位置关系如图1所示。

图1 声探测设备与螺旋桨的空间几何关系Fig.1 Spatial relationship of acoustic detection equipment and propeller
以声探测设备为原点建立空间固定坐标系OXYZ,以螺旋桨的旋转轴中心为原点建立目标坐标系oxyz,以目标坐标系oxyz原点为原点建立参考坐标系O′X′Y′Z′,参考坐标系平行于空间固定坐标系,假设目标坐标系oxyz变换到参考坐标系O′X′Y′Z′的欧拉角为∂,,ε,旋转序列为x-y-z,螺旋桨以角速率Ω绕z轴旋转,假设螺旋桨叶片上的声散射点p在目标坐标系oxyz中位于(x0=0,y0=0,z0=0),在t=0时刻初始旋转角为φ0,则t时刻的旋转角变为φt=φ0+Ωt,从图1中的几何关系可知,此时声探测设备到散射点p之间的距离为
(2)

(3)
其中
(4)
假设仅存在螺旋桨回波,并且不考虑混响、多径干扰等影响[25],则声探测设备接收到的旋转螺旋桨的回波信号为
(5)
其中:N为螺旋桨叶片数;σk为每个叶片的目标散射强度;φk为叶片初始相位;l为叶片长度。
则螺旋桨回波的基带信号为
(6)
则第k个叶片的散射点p的回波相位函数为:
(7)
对相位函数求导可得第k个叶片的散射点p的微多普勒频率为
(8)
其中,λc为发射信号波长。
当探测系统载体伴有振动n(t)=(acosθcosΘ,acosθsinΘ,asinθ),如图2所示,a为振动n(t)的幅度,振动n(t)在XOY面的投影与X轴的夹角为Θ,振动n(t)与其在XOY面的投影的夹角为θ[26]。

图2 探测系统振动示意图Fig 2 Vibration figure of detection equipment
则此时声探测设备到散射点p之间的距离为
(9)
此时螺旋桨回波的基带信号为
(10)
相应地,第k个叶片散射点p的微多普勒频率为
(11)
假设螺旋桨为三叶片,声探测设备发射频率为100 kHz单频连续波信号,声探测设备距离目标坐标系原点R0=100 m,并且α=0°、β=0°,目标坐标系oxyz变换到参考坐标系O′X′Y′Z′的欧拉角为0°,0°,0°,叶片长度l=2 m,旋转速度r=4 r/s,取σk=1,t=0时刻各叶片的初始旋转角分别为φ0=0°、φ0=120°和φ0=240°,则螺旋桨回波信号微多普勒特征谱如图3所示,其中颜色越深表示幅度越大。

图3 螺旋桨回波信号的微多普勒特征谱Fig 3 Micro-Doppler characteristic of propeller echo signal
当探测系统随载体发生幅度a=0.2 m、Θ=30°、θ=60°、频率为100 Hz的简谐振动时,回波信号的微多普勒特征谱如图4所示。
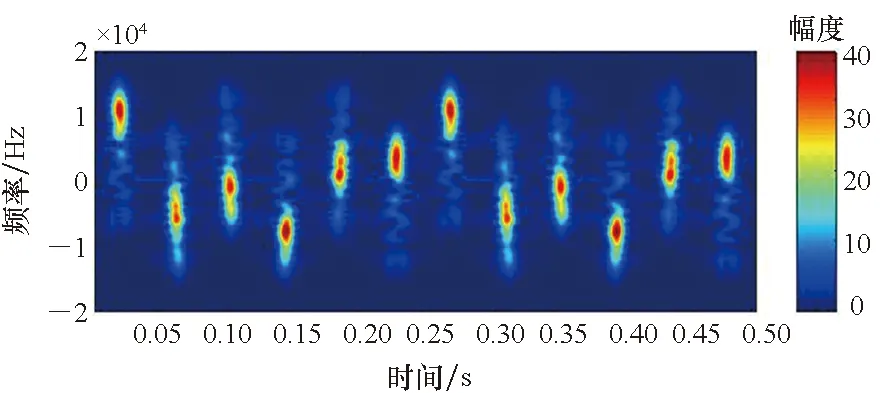
图4 探测系统振动时螺旋桨回波信号的微多普勒特征谱Fig 4 Micro-Doppler characteristic of propeller echo signal with vibration of detection equipment
从图4中可以看出,当水下探测系统随载体产生振动时,会严重影响回波信号的微多普勒特征谱,从而无法完成微多普勒特征参数的提取以及目标的识别和分类,因此必须对载体振动干扰进行抑制。
2 干扰抑制方法分析
若不考虑平动,式(9)可展开为
(12)
其中:D=A2+B2+C2,A=cosφtcoscosε+sinφt(sin∂sincosε+cos∂sinε),B=-cosφtcossinε+sinφt(sin∂sinsinε+cos∂cosε),C=cosφtsin- sinφtsin∂cos,E=Acosβcosα+Bcosβsinα+Csinβ,F=cosβcosαcosθcosΘ+cosβsinαcosθsinΘ+sinβsinθ,G=AcosθcosΘ+BcosθsinΘ+Csinθ。
通常,可认为a≪R0、l≪R0,则有
(13)
(14)
(15)
则对式(12)表达式进行变换,并忽略式(13)~(15)中的无穷小量,可得
(16)
对式(15)进行麦克劳林展开,并忽略二次项以上的无穷小量,可得
rp_n(t)≈R0+lpE+aF
(17)
将式(17)代入式(10)可得


(18)

(19)
对图4的仿真做式(19)的运算,可得干扰抑制后的信号微多普勒特征谱如图5所示。

图5 干扰抑制后的螺旋桨回波信号的微多普勒特征谱Fig.5 Micro-Doppler characteristic of propeller echo signal with interference suppression
从图5中可以看出,谱线清晰可辨,探测系统载体振动干扰得到了较好的抑制。
3 误差分析
由第2节的分析可知,所得结论是基于假设l≪R0和a≪R0,当该假设条件不满足时会产生较大误差。
假设螺旋桨为三叶片,声探测设备发射频率为100 kHz单频连续波信号,声探测设备距离目标参考坐标系原点R0=8 m,并且α=0°、β=0°,参考坐标系和目标坐标系无旋转,叶片长度l=5 m,旋转速度r=4 r/s,取σk=1,t=0时刻各叶片的初始旋转角分别为φ0=0°、φ0=120°和φ0=240°,探测系统随载体发生幅度a=0.2 m、Θ=30°、θ=60°、频率为100 Hz的简谐振动,采用式(19)方法进行干扰抑制,螺旋桨回波信号微多普勒特征谱如图6所示。

图6 R0=8 m,l=5 m时螺旋桨回波微多普勒特征Fig.6 Micro-Doppler characteristic of propeller echo signal with R0=8 m,l=5 m
可以看出,当l的值接近R0时,采用式(19)方法进行干扰抑制所得的回波信号仍保留有大量误差。
图7为R0=10 m时,采用式(19)运算后,信号频率的误差均值随螺旋桨叶片长度l的变化规律。

图7 R0=10 m时信号频率误差随l的变化规律Fig.7 Frequency error according to l with R0=10 m
从图7中可以看出,随着l逐渐接近R0,频率误差也在逐渐增大,通常情况下螺旋桨叶片长度不可能太大,而探测设备大都处于较远距离,因此l≪R0通常是符合实际情况的。
假设螺旋桨为三叶片,声探测设备发射频率为100 kHz单频连续波信号,声探测设备距离目标参考坐标系原点R0=8 m,并且α=0°、β=0°,参考坐标系和目标坐标系无旋转,叶片长度l=0.8 m,旋转速度r=4 r/s,取σk=1,t=0时刻各叶片的初始旋转角分别为φ0=0°、φ0=120°和φ0=240°,探测系统随载体发生幅度a=5 m、Θ=30°、θ=60°、频率为100 Hz的简谐振动,采用式(19)方法进行干扰抑制,螺旋桨回波信号微多普勒特征谱如图8所示。

图8 R0=8 m,a=5 m时螺旋桨回波微多普勒特征Fig.8 Micro-Doppler characteristic of propeller echo signal with R0=8 m,a=5 m
由图8可以看出,随着探测系统振动幅度的增大,采用式(19)运算得到的回波信号微多普勒特征谱出现了明显的干扰。
图9为R0=10 m时,采用式(19)运算后,信号频率的误差均值随探测系统振动幅度a的变化规律。

图9 R0=10 m时信号频率误差随a的变化规律Fig.9 Frequency error according to a with R0=10 m
从图9可以看出,随着a逐渐接近R0,频率误差也在逐渐增大,通常情况探测系统振动幅度不可能太大或者变化较为缓慢,而探测设备大都处于较远距离,因此a≪R0通常是符合实际情况的。
从以上分析可知,通常情况下,探测系统与目标的距离远大于螺旋桨叶片长度和探测系统振动幅度,因此采用式(19)的方法可以有效抑制探测系统平台振动干扰。
4 结论
本文针对基于微多普勒效应的水下目标探测系统载体振动干扰问题,采用麦克劳林级数展开,推导出了干扰信号的乘性表达式,并建立了载体振动干扰抑制算法,主要结论为如下:
1)当l≪R0和a≪R0时,基于微多普勒效应的水下探测系统载体振动干扰可以简化为目标回波信号的乘性干扰,在准确获取干扰信号的情况下,采用文中的干扰抑制方程可有效抑制载体振动干扰。
2)当l≪R0和a≪R0条件不满足时,随着l和a逐渐接近R0,微多普勒特征谱误差逐渐增大,此时应采取其他干扰抑制方法。然而对于绝大多数应用来说,文中假设条件总能满足,因此文中方法可有效抑制基于微多普勒效应的水下探测系统载体振动干扰。
本文理论公式的推导思路和方法可推广到其他探测系统载体振动干扰抑制的研究中。
