基于XGBoost的智能驾驶车辆换道决策研究
2022-11-21付斌朱煦晗涂宁宁
付斌 朱煦晗 涂宁宁
(岚图汽车科技有限公司,武汉 430000)
主题词:智能汽车 换道决策 XGBoost 贝叶斯优化
1 前言
换道决策是智能驾驶车辆换道过程中非常重要的一环,也是智能驾驶领域的重点研究方向。国内外很多学者针对智能驾驶汽车换道决策模型开展了深入研究。目前,可以将换道决策模型分为基于规则的模型和基于人工智能的模型。
基于规则的模型即人工建立一系列换道规则,从而作出换道决策,但其无法适应复杂的交通道路条件。人工智能算法具有强大的学习能力和分类能力,基于人工智能算法的换道模型成为主流研究方向。其中,神经网络经过训练后可以很好地模拟人类的决策过程,因此被广泛应用。Hunt 等[1]首次将神经网络模型引入车辆换道决策过程,并证明了其可行性。Dumbuya 等[2]建立了一个三次网络的网络数据聚合(Networks Data Aggregation,NDA)模型,通过车辆位置、速度及交通车的信息即可输出换道主车的目标速度和方向。Meng 等[3]建立了分类回归树(Classification and Regression Tree,CART)模型对驾驶员的换道行为进行预测。Dou等[4]利用支持向量机(Support Vector Machine,SVM)和神经网络建立了高速车辆换道决策模型。Schubert 等[5]将贝叶斯网络(Bayesian Network,BN)用于换道决策模型中;Motamedidehkordi 等[6]建立了基于随机森林(Random Forest,RF)的换道决策模型。目前,相比于基于规则的决策模型,基于人工智能的换道决策模型决策准确率大幅提升,但其模型单一,缺少参数寻优过程,决策准确率仍有提升空间。本文基于贝叶斯优化算法来优化XGBoost模型的超参数,以进一步提高模型的决策准确率。
2 基于NGSIM数据集的轨迹提取
美国交通运输部门的NGSIM(Next Generation Simulation)计划提供了5组数据集,其中I-80和US-101为高速数据集,本文选取这2 个数据集作为研究对象,提取换道数据。图1所示为I-80数据的采集路段[7]。
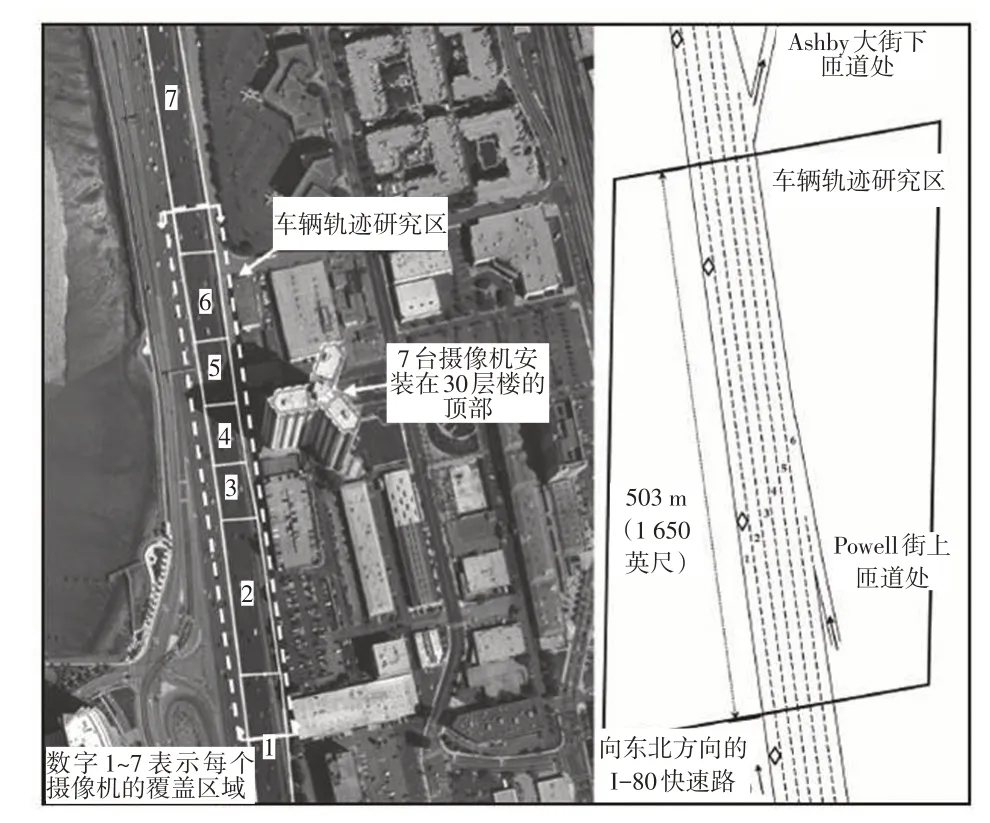
图1 I-80数据采集路段示意
2.1 行驶轨迹预处理
NGSIM 中的数据在采集过程中并未采用高精度定位,所以数据中存在一定的错误和误差,故本文采用Thiemann 提出的对称指数移动平均滤波(symmetric Exponential Moving Average filter,sEMA)算法[8]对数据进行平滑处理。sEMA算法的公式为:

式中,xa(ti)、高高高高(ti),i∈[1,Na]分别为车辆a在ti时刻的测量值、拟合值;Na为车辆a轨迹数据点的数量;D=min{3,i-1,Na-1}为考虑数据边界的平滑窗口宽度;Δ=T/dt为平滑宽度;dt=0.1 s为采样频率;T为平滑区域的采样时间宽度,其取值随滤波数据类别x的不同而不同,当x对应位置、速度、加速度数据时,T分别取0.5 s、1.0 s、4.0 s;。
本文针对I-80数据集中的第1882号车辆数据进行滤波处理,距离、速度、加速度如图2所示。
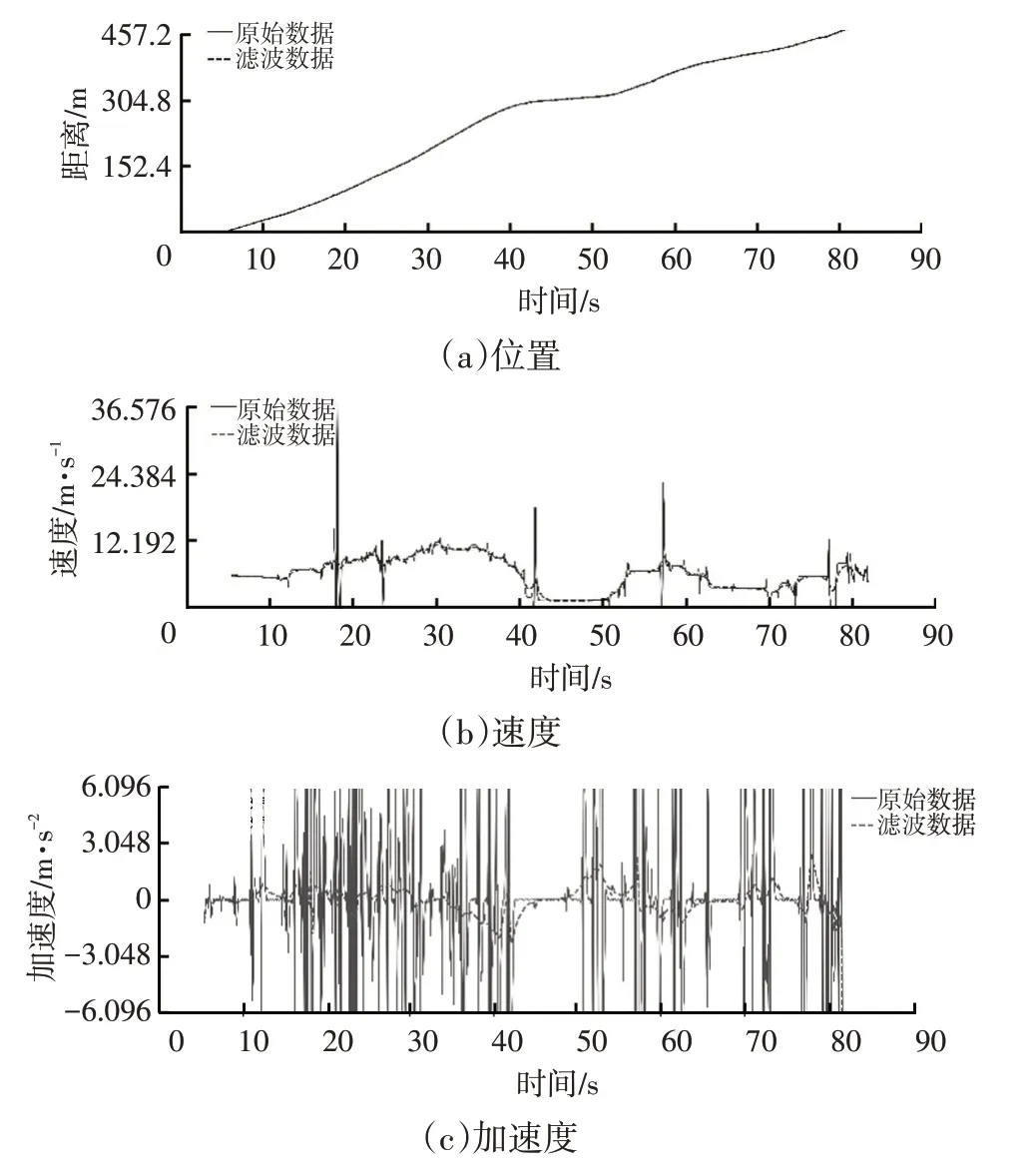
图2 1882号车行驶状态信息滤波结果
2.2 行驶轨迹预处理
本文研究智能驾驶汽车的换道行为,因此需从US-101 和I-80 数据集中提取有效的换道片段供训练模型使用。Wang 等[9]研究发现,车辆的换道时间通常小于20 s,因此可认为一个完整的换道过程时间为20 s,以车辆所在车道发生变化的时刻为中心时刻,向前、向后各取10 s,作为换道轨迹片段。此外,并非所有换道过程数据均可使用,在US-101和I-80中有些换道点靠前或靠后,导致前10 s 或后10 s 并没有完整的10 s 数据,故将满足条件T0-10>Tstart且T0+10<Tend的换道轨迹视为有效换道轨迹,其中T0为车道编号变化的时刻,Tstart为换道起始时刻,Tend为换道终止时刻。图3 展示了数据中有些车辆虽然发生了换道,但换道轨迹不完整的情况。
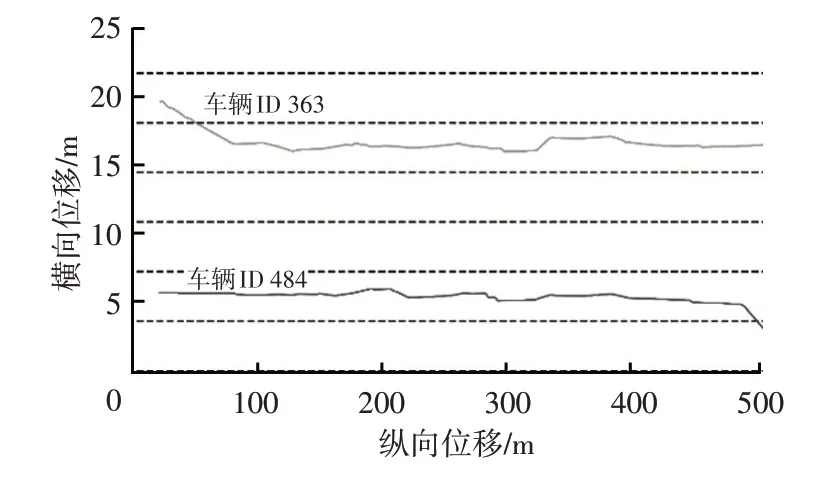
图3 不完整的换道轨迹
此外,仍存在某些换道不成功的轨迹,本文采用KMeans聚类算法进行换道轨迹的聚类,进而从中分离出可用的换道轨迹。令第i段轨迹的横向位移为一维列向量Xi=(xi(1),xi(2),…,xi(N)),其中xi(k)为第i段轨迹在第k个时间点的车辆横向位移坐标,考虑到NGSIM 数据集的采样周期是0.1 s,所以N=200。
聚类前对轨迹进行标准化处理,并计算其间的欧氏距离:

2个轨迹之间的欧式距离可以表征其相似度,欧式距离小于相应阈值,表明2个轨迹属于同一类轨迹,KMeans计算聚类差异值的公式为:

式中,X为当前计算的某一条换道轨迹;μ为聚类的中心集;μk为第k类的聚类中心;n为聚类的轨迹数量。
通过K-Means的聚类,可以分离出换道成功的轨迹和换道失败的轨迹,如图4 所示,该聚类结果是I-80 数据中17:00~17:15之间换道的数据。
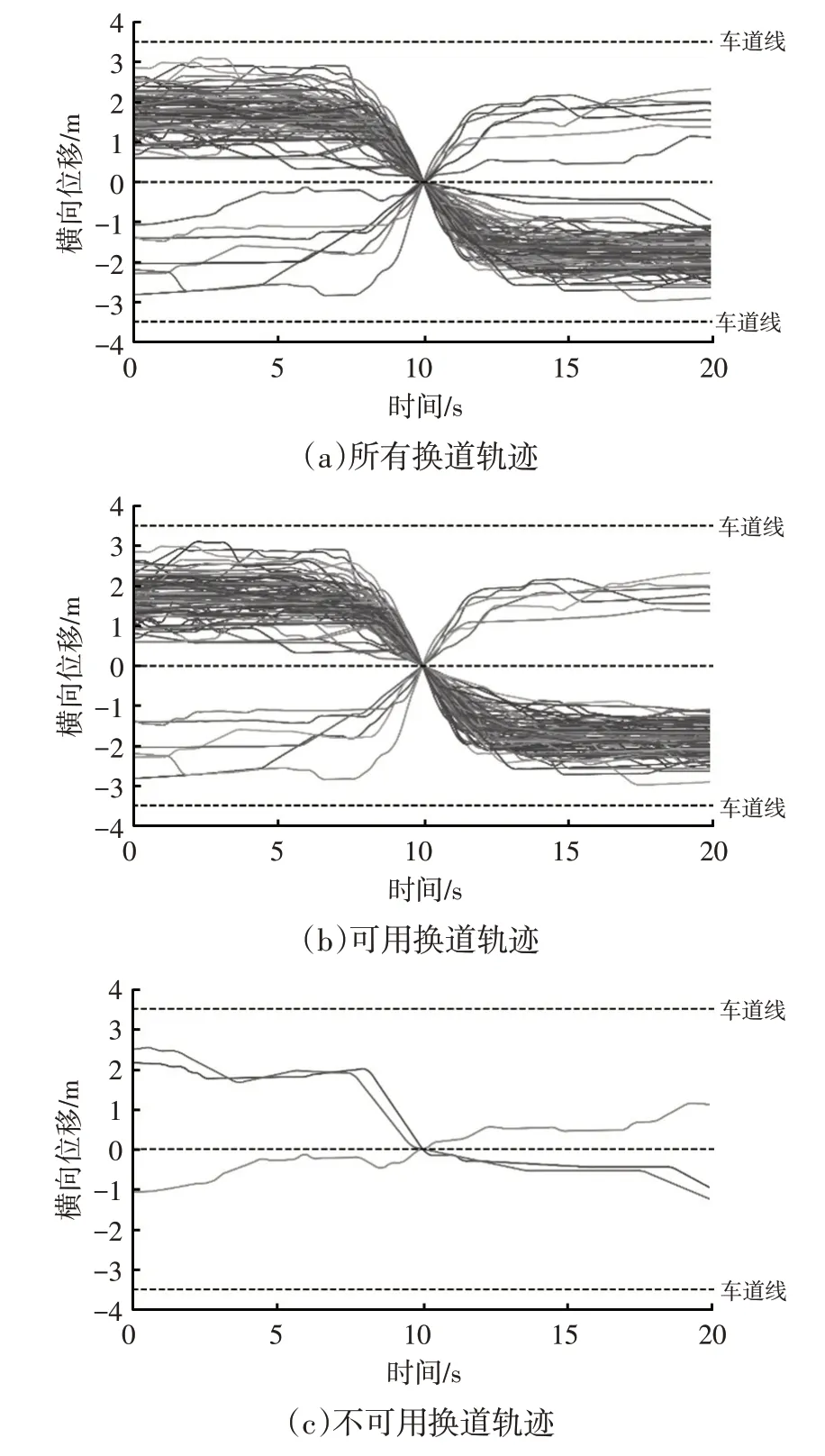
图4 换道轨迹聚类结果
提取到可用换道轨迹后,还需提取换道的起始点,本文结合车辆换道时的横向位移变化和横向速度阈值来确定车辆换道的起始点。在判断换道起点时,以NGSIM数据集中车辆车道信息变化的时刻点为基础,向前回溯至车辆的横向加速度极值点,再以此点作为第2基础点向后追溯,直到车辆的横向加速度大于0.2 m/s2,本文以此点作为换道起始点,如图5所示。
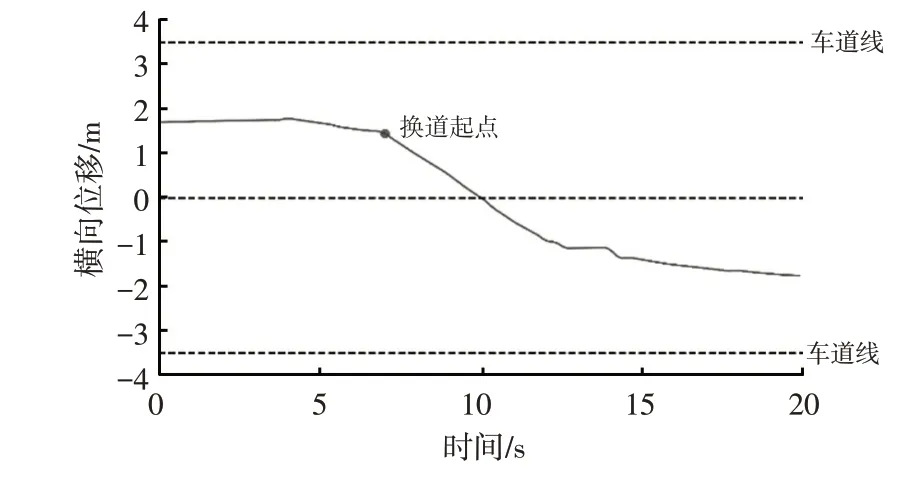
图5 换道起点判断示意
3 换道决策变量的选取
3.1 变量选取
车辆的换道行为受到多方因素的影响,不仅包括自车的速度、加速度等,还包括交通车的运动状态等。车辆换道过程如图6所示。
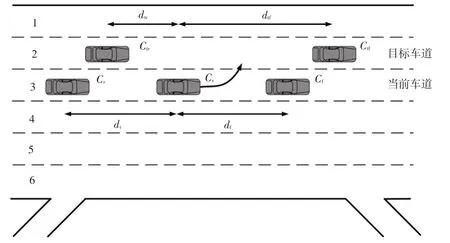
图6 车辆自由换道行为示意
现有的换道决策算法中,对于换道决策变量的选取不同,本文结合其他文献,选取共17 个换道决策变量,可以包含自车和交通车的行驶状态:换道主车速度vs、换道主车加速度as、当前车道前车与主车的纵向距离df=yf-ys、主车与当前车道前车的速度差Δvf=vs-vf、主车与当前车道前车的加速度差Δaf=as-af、主车与当前车道前车的碰撞时间tf=(yf-ys)/(vs-vf)、当前车道后车与主车的纵向距离dr=yr-ys、主车与当前车道后车的速度差Δvr=vsvr、主车与当前车道后车的加速度差Δar=as-ar、目标车道前车与主车的纵向距离dtf=ytf-ys、主车与目标车道前车的速度差Δvtf=vs-vtf、主车与目标车道前车的加速度差Δatf=as-atf、主车与目标车道前车的碰撞时间ttf=(ytf-ys)/(vs-vtf)、目标车道后车与主车的纵向距离dtr=ytr-ys、主车与目标车道后车的速度差Δvtr=vs-vtr、主车与目标车道后车的加速度差Δatr=as-atr、主车与目标车道后车的碰撞时间ttr=(ytr-ys)/(vs-vtr)。其中,yf、vf、af分别为当前车道前车纵向坐标、速度、加速度,ys为主车纵向坐标,yr、vr、ar分别为当前车道后车纵向坐标、速度、加速度,ytf、vtf、atf分别为目标车道前车纵向坐标、速度、加速度,ytr、vtr、atr分别为目标车道后车纵向坐标、速度、加速度。
3.2 决策变量相关性分析
本文选取Chen[10]提出的重要性评价指标F-score对不同的决策变量进行重要性分析排序,其具体计算公式为:
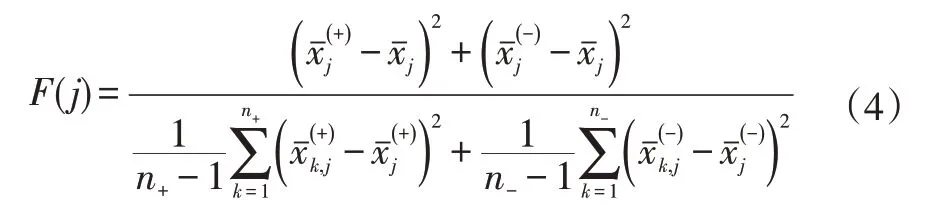
F-score 越大,说明该特征作为决策变量的辨别能力越强,其对决策行为贡献程度越大。通过计算Fscore得到这17个变量的重要性如图7所示。
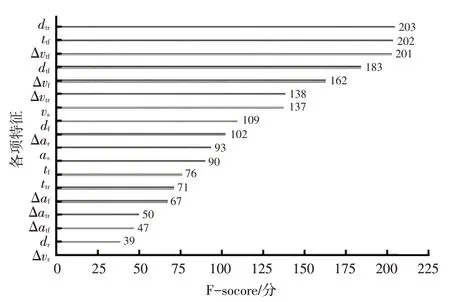
图7 特征变量的F-score分数
4 基于贝叶斯优化的XGBoost模型验证和结果分析
4.1 贝叶斯优化算法
贝叶斯优化算法可以缩短优化时间,适合解决非凸问题,其计算过程为:
1:fort=1,2,…do
2:最大化采集函数,得到下一个采样点:xt=argmaxμ(x|D1:t-1)
3:求得采样点处的函数值yt=f(xt)
4:更新样本集合D1:t={D1:t-1,(xt,yt)},并更新函数f的后验分布
5:end
4.2 换道决策模型的超参数优化
在XGBoost决策模型中,有许多超参数可以自行设定,本文采用贝叶斯优化算法对XGBoost的部分超参数进行寻优,需寻优的超参数如表1所示。
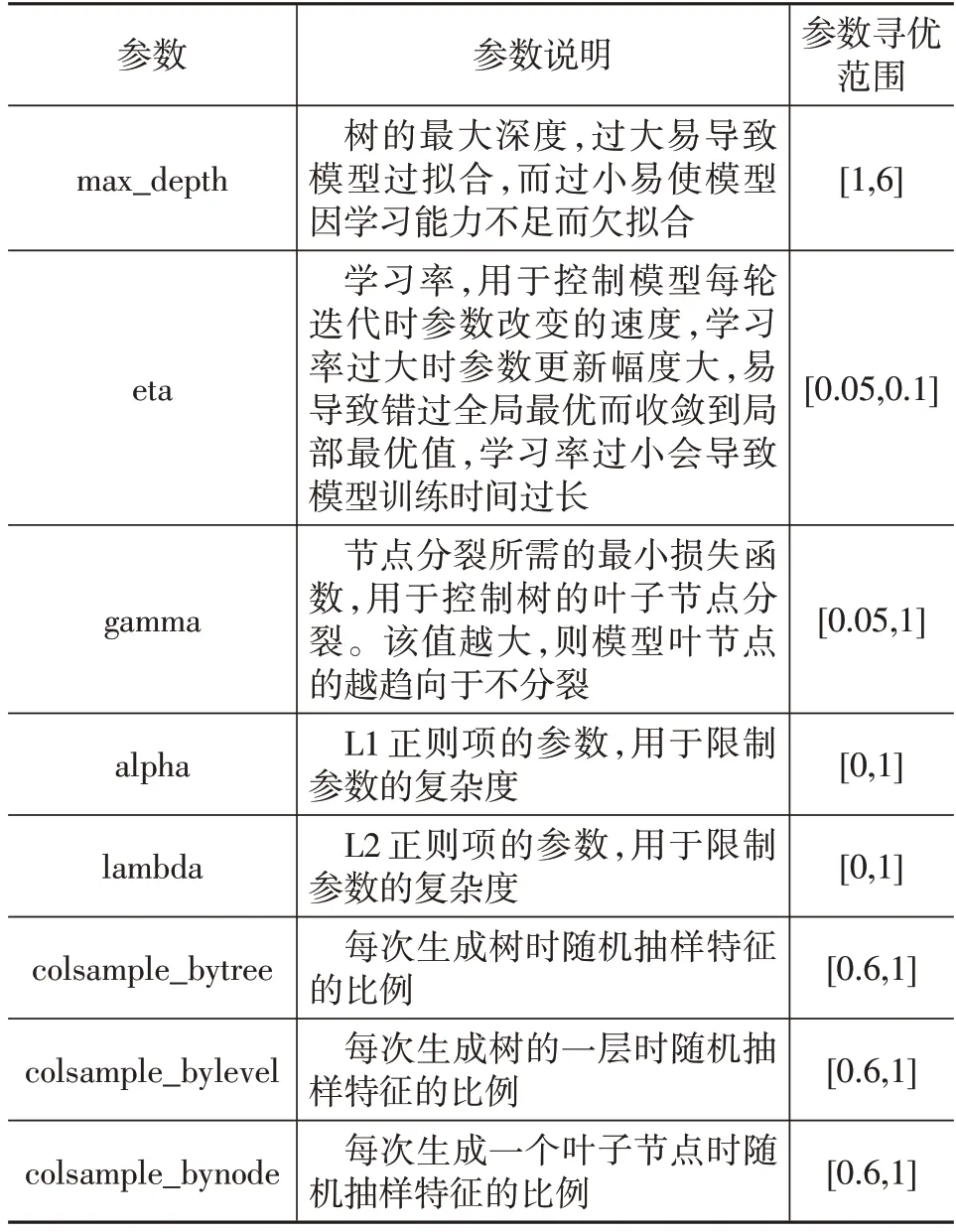
表1 XGboost需要寻优的超参数
贝叶斯寻优算法的迭代次数设定为50次,XGBoost超参数优化过程如图8 所示,随着迭代次数的增多,接受者操作特性(Receiver Operating Characteristic,ROC)曲线的曲线下面积(Area Under Curve,AUC)逐渐升高且趋于稳定。
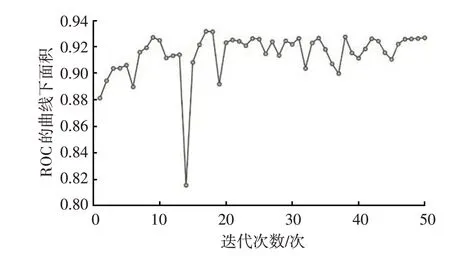
图8 基于贝叶斯优化的XGBoost超参数优化过程
经过贝叶斯优化算法优化后,XGBoost 的超参数的最优值如表2所示。
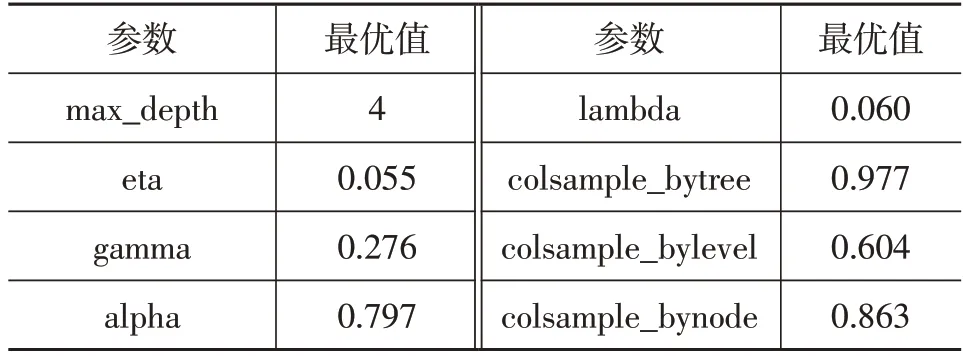
表2 最优超参数
将超参数带入XGBoost模型进行验证,可以得到其交叉验证的曲线如图9所示。
在图9 中,优化后测试集的AUC 显著提升,且其与优化后的训练集之差也明显小于未经优化的训练集和测试集之差。其结果表明,优化后,XGBoost 模型的过拟合现象降低,可以有效预测未知数据,泛化能力提升。
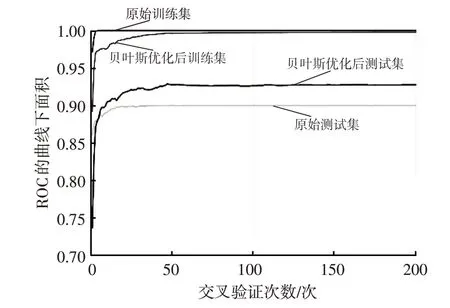
图9 XGBoost交叉验证曲线
4.3 不同换道决策模型的性能对比
本文选取经贝叶斯优化的XGBoost 决策模型进行测试,同时与未经优化的XGBoost 模型、支持向量机模型、随机森林模型和决策树模型进行比较分析。带入相同的换道训练样本集,可以得到不同决策模型在测试集中的ROC 曲线,如图10 所示,其中假正类率表示模型预测为正类但实际为负类的样本占所有实际为负类的样本的比例,真正类率表示模型预测为正类且实际也为正类的样本占所有实际为正类的样本的比例。ROC 曲线下包络的面积即AUC,AUC 越高,其预测效果越好。本文设计的贝叶斯优化的XGBoost 决策模型的AUC值为0.925。
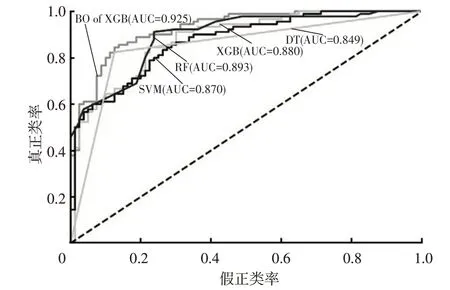
图10 不同方法的预测ROC曲线
其不同换道决策模型的性能测试参数如表3所示。
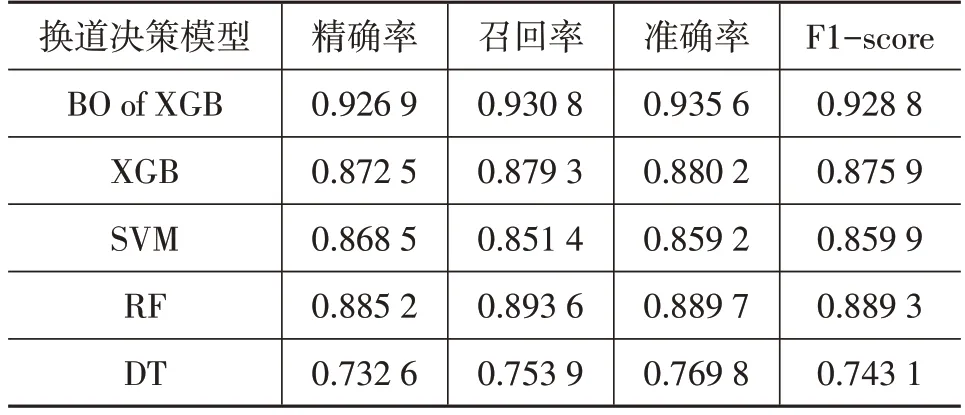
表3 不同换道决策模型性能参数
对以上的换道决策模型进行比较,可以明显看出,经过贝叶斯优化的XGBoost 换道决策模型在各项指标上均由于其他换道决策模型,提升约4%。
5 结束语
本文基于NGSIM数据集进行换道训练测试数据的提取,选取XGBoost 决策模型设计换道决策算法,以贝叶斯优化算法来优化XGBoost决策模型的超参数,在模型的训练过程中,充分考虑了换道的实际情况,选取了自车和其他交通车等多项运动参数作为决策变量,最终训练出的模型在US-101 和I-80 数据集中决策精确率和准确率均在90%以上,本文设计的换道决策模型可为智能驾驶汽车自主换道设计提供参考。
