高超声速变外形飞行器建模与有限时间控制
2022-11-09张远黄万伟路坤锋白文艳于江龙
张远 黄万伟 路坤锋 白文艳 于江龙
(1. 北京航天自动控制研究所, 北京 100854; 2. 宇航智能控制技术国家级重点实验室, 北京 100854;3. 北京航空航天大学 自动化科学与电气工程学院, 北京 100083)
作为航空与航天的综合产物,高超声速飞行器(hypersonic flight vehicle, HFV)具有十分明显的优势。 军事应用上具有飞行距离远、飞行速度快、突防能力强、任务可调整等特点,是对应未来近天空作战,突破导弹防御系统,实现快速精确打击的重要武器;在民用上,高超声速飞行器能够实现低成本重复跨大气层飞行和天地往返,是航天运输系统的一个重要组成部分[1-2]。
随着HFV 在军事和商业领域的应用潜力越来越明显,HFV 的研究也逐渐受到世界各航天和军事大国的广泛关注。 但是,HFV 也存在着一些值得进一步优化的问题,如大飞行包线与外形局限的矛盾、几何包络大与发射系统受限的矛盾等问题。 可想而知,如果飞行器能够在飞行过程中,根据不同环境、不同任务条件下改变自己的外形,则既能保证适应固有条件约束的情况下,又能在飞行中实时获得较优的气动性能,从而扩展任务裕度,满足更为复杂的飞行任务,因此,高超声速变外形飞行器(hypersonic morphing flight vehicle,HMFV)的概念应运而生[3-4]。 具体而言,变外形飞行器(morphing flight vehicle, MFV)是指一类能够依据具体的飞行环境和任务要求实时调整外形结构的飞行器。 MFV 将外形参数作为可控变量,利用变外形对气动特性产生影响从而改变飞行器的性能,使其能够适应更宽范围内的飞行空域和速域,从而能够适应更复杂的飞行任务和环境,获得更优的气动和操纵性能[5]。
然而,HMFV 的可变形能力在给飞行器带来性能提升的同时,也给控制技术带来了更多的挑战,主要包括以下3 点[6]:①变形过程建模难,难以获得相对精确的动力学模型;②变形过程中,飞行器系统呈现出多模态、强非线性和强耦合的特点;③飞行器在变形飞行过程中极易受到系统内、外扰动的影响,系统呈现大不确定性,使得系统稳定性难以得到保证。 因此,需要设计一套具有强适应能力的姿态控制器作为支撑,能够适应HMFV高超声速环境飞行下变形幅度大、气动不确定性大及外界干扰复杂带来的综合扰动。 针对MFV 的控制问题,学者们主要遵循2 条思路开展研究:①将变形作为影响系统稳定的因素,设计能够“容忍”此类扰动的鲁棒/自适应/智能控制器,称之为变形/飞行串行控制;②将变形量作为控制量,利用变形来实现飞行器机动、滚转等动作,称之为变形/飞行并行控制。 针对此问题,现有文献主要有基于LPV 的增益调度控制和基于滑模控制、反步控制、智能控制及相关理论的综合应用[7-18]。
近年来,学者们所研究的变外形飞行器多集中在低速域、低空域,主要包括变后掠、变展长及组合变形类飞行器。 文献[7-8]针对变展长和变后掠飞行器的控制问题,采用平滑切换LPV 鲁棒控制方法,前者将调参变量区间划分为具有局部重叠特性的子区间,得到了变体飞行器的切换LPV 模型,设计了平滑切换控制器,其中重叠子区间控制器由相邻子区间控制器插值得到。 文献[9]将调参变量区间划分为奇数个相连非重叠的子区间,得到了LPV 系统,以后掠角的变化率为调度参数,并据此设计出了平滑切换控制器。文献[10-11]针对变后掠飞行器,为了降低设计的保守性,基于多Lyapunov 函数方法和模态依赖平均驻留时间方法给出了保证系统有限时间有界且具有给定H∞性能指标的充分条件,进而设计了非脆弱鲁棒控制器。 文献[12]考虑到工程中系统状态不可测,引入惯导数据作为辅助信息,利用Kalman 滤波算法融合飞控信息与惯导信息实现了状态估计,基于状态反馈方法设计了局部控制器。 局部线性模型和局部控制器通过模糊集和模糊规则聚合成一个连续光滑的全局T-S 模糊模型和T-S 模糊控制器。 由此可知,基于LPV 模型的鲁棒增益调度控制方案能够在飞行器变形过程中对飞行器进行稳定控制,且对外界干扰具有一定的鲁棒性,已经成为变形飞行器控制系统设计的重要方法之一。
考虑到变形飞行器的高度非线性、时变特性强、不确定性大等问题,同时要对飞行任务和复杂环境适应性强等特点,传统的线性控制方法不易获得满足需求的控制效果,特别是针对高速类变外形飞行器而言,更是对线性控制方法的应用提出挑战,这就促使学者去寻求更适应于此类高动态复杂系统的控制方案。 文献[13]以高超声速变外形飞行器纵向模型为研究对象,后掠角10 s内变形从30°增加至60°,以反步法为基础,采用一阶滤波器解决“微分爆炸”问题,设计了自适应律来应对不确定性问题,构成了一套鲁棒自适应控制方案。 文献[14]针对可变后掠角飞行器纵向模型,设计了带有输入输出约束的神经网络动态面控制方案,基于最小化学习参数的神经网络来估计模型的不确定性,从而减少在线更新参数。文献[15]针对带有小翼的飞行器,分别设计了小翼收缩和展开2 种状态下的滑模控制器,加入控制器模糊调度策略,获得了小翼变形全过程的控制。 文献[16]给出了以变形量为自变量的拟合气动参数,针对纵向模型利用神经网络动态逆的方法构造自适应控制器,采用链式微分方法获得新定义变化量的微分量用于控制律的设计。 文献[17]将变形产生的影响作为扰动,采用了自抗扰设计思想,基于反步法设计思想选取Lyapunov 函数,递推设计滑模控制律,同时引入状态观测器对复合干扰进行补偿。 文献[18] 将基于Actor-Critic的智能控制架构用于自抗扰控制器的设计中,实时调节控制增益,针对Wing-cone 的变后掠模型进行了姿态控制律的设计。
综上所述,现有针对MFV 的控制研究,大多文献仅考虑变形带来的气动变化问题,没有剖析飞行器变形过程中带来的其他影响因素。 HMFV不仅存在强耦合、非线性、大不确定性等问题,其变形过程带来的未知动态、压心转移、转动惯量变化、附加力矩干扰等更是HMFV 不容忽视的问题。 同时,对于HMFV 而言,由于变形的影响,对于收敛性能这一关键指标的要求尤为突出,而绝大多数的控制设计方法得到的控制律使得闭环系统最快的收敛形式是指数形式,难以获得更优的收敛性能,这就迫使研究设计有限时间收敛控制器(finite-time convergence controller, FTCC)。 针对有限时间收敛控制问题,文献[19]针对飞行器二阶刚体模型设计有限时间姿态控制律,文献[20]进一步研究飞行器执行机构故障下的有限时间控制。 文献[21]针对复合式变体无人机,设计一种基于复合时变障碍Lyapunov 函数和动态滑模面的控制器,保证无人机飞行指令的有限时间跟踪。
本文将有限时间控制方法用于HMFV 的姿态控制中,充分发挥其收敛性能的优越性,有利于增强变形飞行器控制系统的鲁棒性和提升自适应能力。 受此启发,在前人的基础上,研究HMFV的姿态控制问题,本文设计了一套在风干扰、气动参数摄动、连续变形等复杂环境下的有限时间收敛姿态控制器。 主要贡献如下:
1) 建立HMFV 面向控制的动力学模型,分析变外形飞行器由变形带来的关键气动特性变化,同时给出处理连续变形情况下的难建模部分一类可行处理方案。
2) 分别针对内外环设计有限时间收敛控制律,基于Lyapunov 理论证明稳定性;利用扩张状态观测器估计工程中难以直接测量的状态量及复合干扰。
3) 针对控制律中用到的指令微分项,设计一种有限时间收敛指令滤波器,有效解决常规滤波器指令跟踪慢、精度低的问题;通过对比仿真验证所设计的控制器能够针对不同变形速率下具有较强的鲁棒性能。
1 非仿射HMFV 模型
1.1 姿态系统非线性模型
研究对象是一类可变后掠的HMFV 飞行器,开展巡航段变形下的姿态控制问题研究。 简易构型如图1 所示,Ob为机体质心,Λ为可变后掠翼转动的理论链接点,H和L分别为质心Ob到链接点Λ的垂直距离分量和水平距离分量,后掠翼的外沿长度为λ,后掠角为ζ,变形速率为ζ·,后掠翼可根据飞行器状态和任务实现绕Λ点转动,实现后掠翼的转动,图1 中翼外沿的虚线和实线分别表示2 种不同后掠角的情况。 由于飞行器在飞行过程中,外形的变化带来气动、转动惯量等变化,倘若使用常用的单刚体六自由度模型会忽略过多飞行器的动态特性,因此,采用基于多体动力学建立高超声速变后掠飞行器的六自由度模型,将飞行器分为机体、左后掠翼和右后掠翼3 个刚体进行模型建立。

图1 变外形飞行器简易构型Fig.1 Schematic diagram of HMFV
在建模过程中,为了降低问题的复杂性,但却不失一般性,给出以下假设:
1) 可变后掠翼均为刚体,质量不变。
2) 只考虑后掠翼水平转动的影响。
3) 不考虑翼型变化产生的影响,可变后掠视为均匀薄面。
4) 左右两侧可变后掠为对称变形,即变形速率及后掠角大小始终一致。
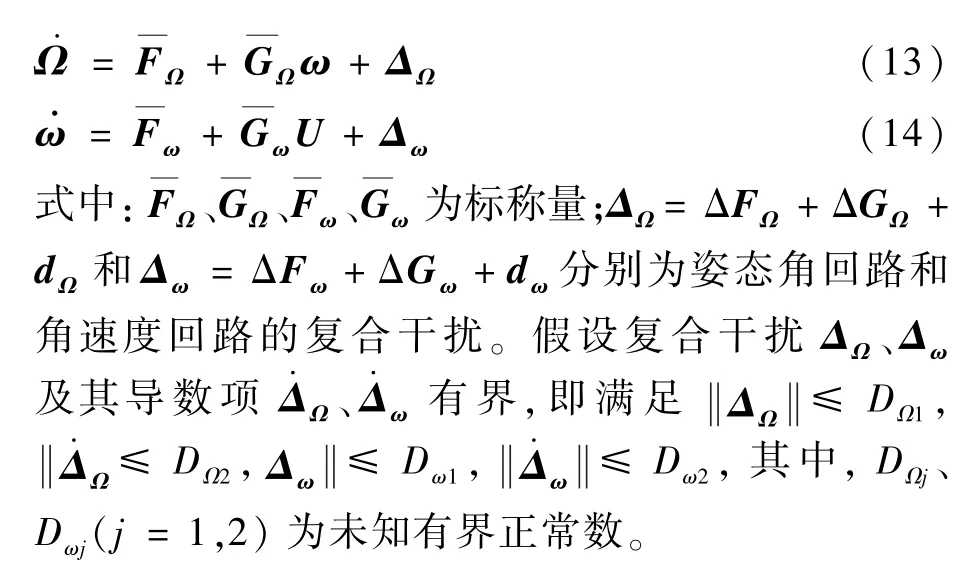
由于研究的是变后掠飞行器的姿态控制问题,则忽略变形过程产生的附加力带来的影响,主要关注后掠角的变化带来的附加力矩的影响,限于篇幅,本文直接给出面向控制的高超声速变外形飞行器的姿态控制模型:
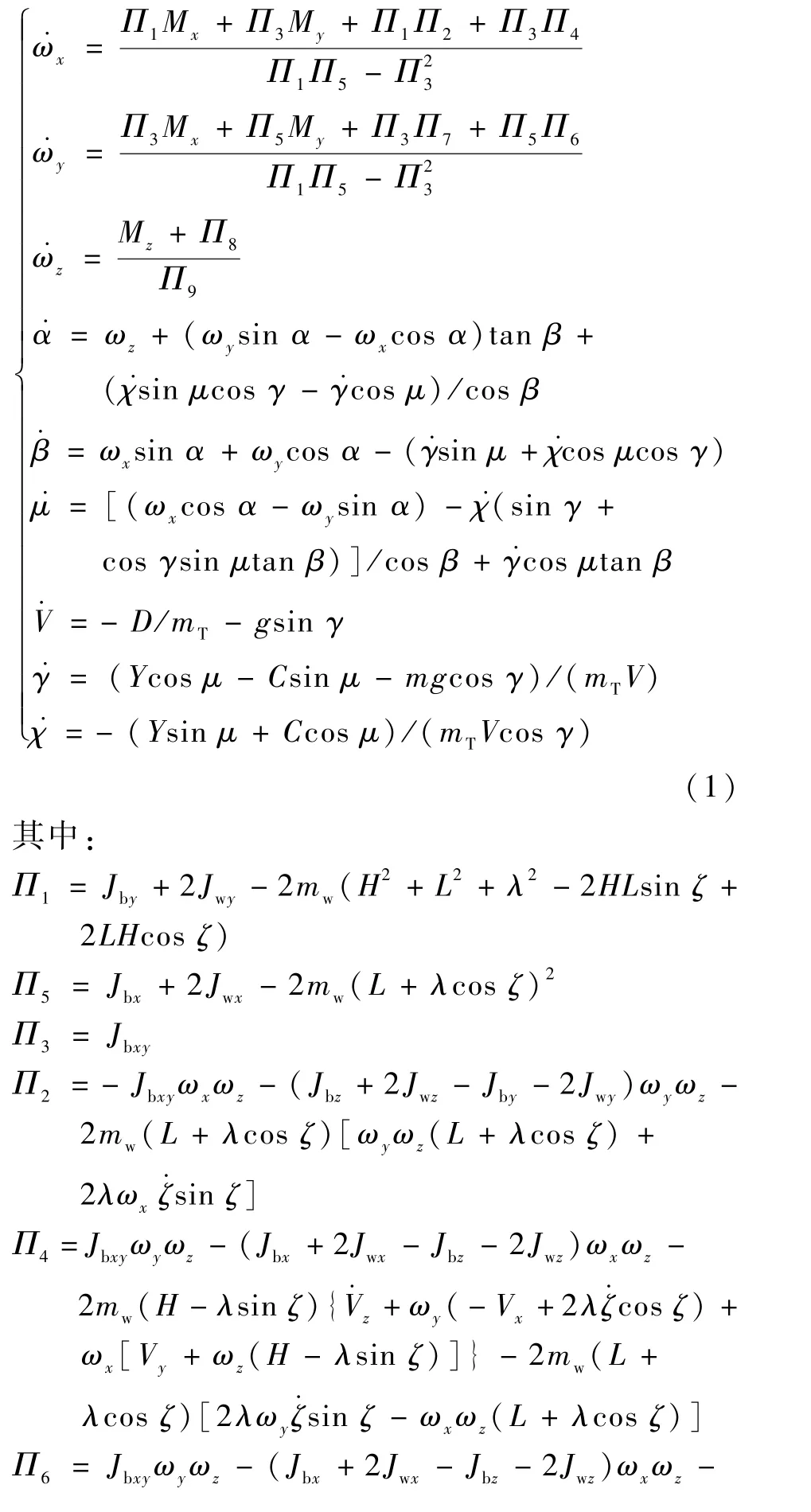
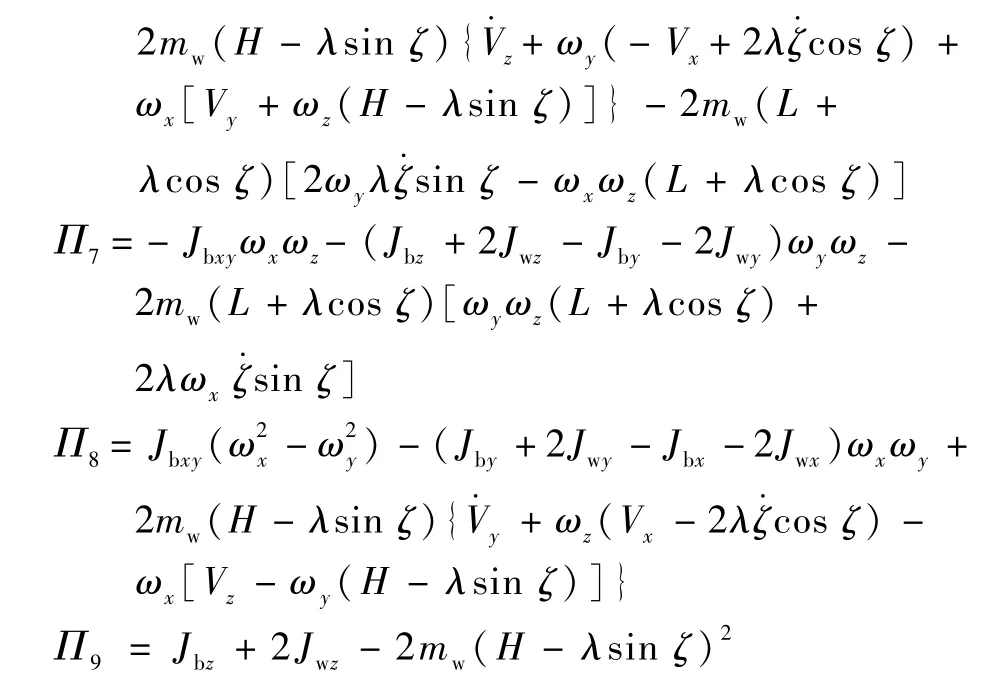
式中:Mx、My、Mz分别为滚转力矩、偏航力矩、俯仰力矩;D为阻力;C为侧向力;Y为升力;mT为飞行器总质量;V为速度;g为重力加速度。

说明:一般地,变形飞行器通常有变后掠、变展长及二者的复合形式,难以准确获得转动惯量的实时特性,可以根据变形部分特征点处转动惯量实际变化趋势来定义式(2),经分析,转动惯量随着变形量的正弦函数值呈现线性关系,因此采用式(2)形式。
1.2 气动数据模型分析
该模型的气动数据是基于后掠角变化分别为30°→45°→60°→90°的4 种构型下由流体仿真软件Fluent 获得。 六分量气动插值表状态范围如表1所示。

表1 气动插值表状态范围Table 1 State range of aerodynamic interpolation
式(1)中气动力在速度坐标系的分量Y为升力、D为阻力、C为侧向力,可表示为

式中:Q为动压,且Q=ρV2/2,ρ为飞行器所处环境的大气密度;S为飞行器参考面积;CD、CY、CC分别为阻力系数、升力系数、侧向力系数。

气动力矩在机体坐标系下的分量分别为俯仰力矩Mz、偏航力矩My、滚转力矩Mx,可表示为式中:ˉc和ˉb分别为纵向特征长度和侧向特征长度;Cmx、Cmy和Cmz分别为滚转通道、偏航通道和俯仰力通道的力矩系数。
一般而言,六分量气动系数CD、CY、CC、Cmx、Cmy和Cmz均是关于Ma、α、β、δx、δy、δz的非线性关系,一般可以通过插值获得气动系数,亦可通过拟合函数得到的代理模型。 本文通过高维插值实时获得某一构型下不同状态的气动系数,再考虑变形量进一步拟合得到不同构型、不同状态下的气动系数。


对于大气密度和声速而言,一般可以根据经验公式或插值得到,本文仅研究30 ~40 km 高度的滑翔段,仅给出该高度范围下的密度和声速的经验公式[22],不同高度下的大气密度如下:
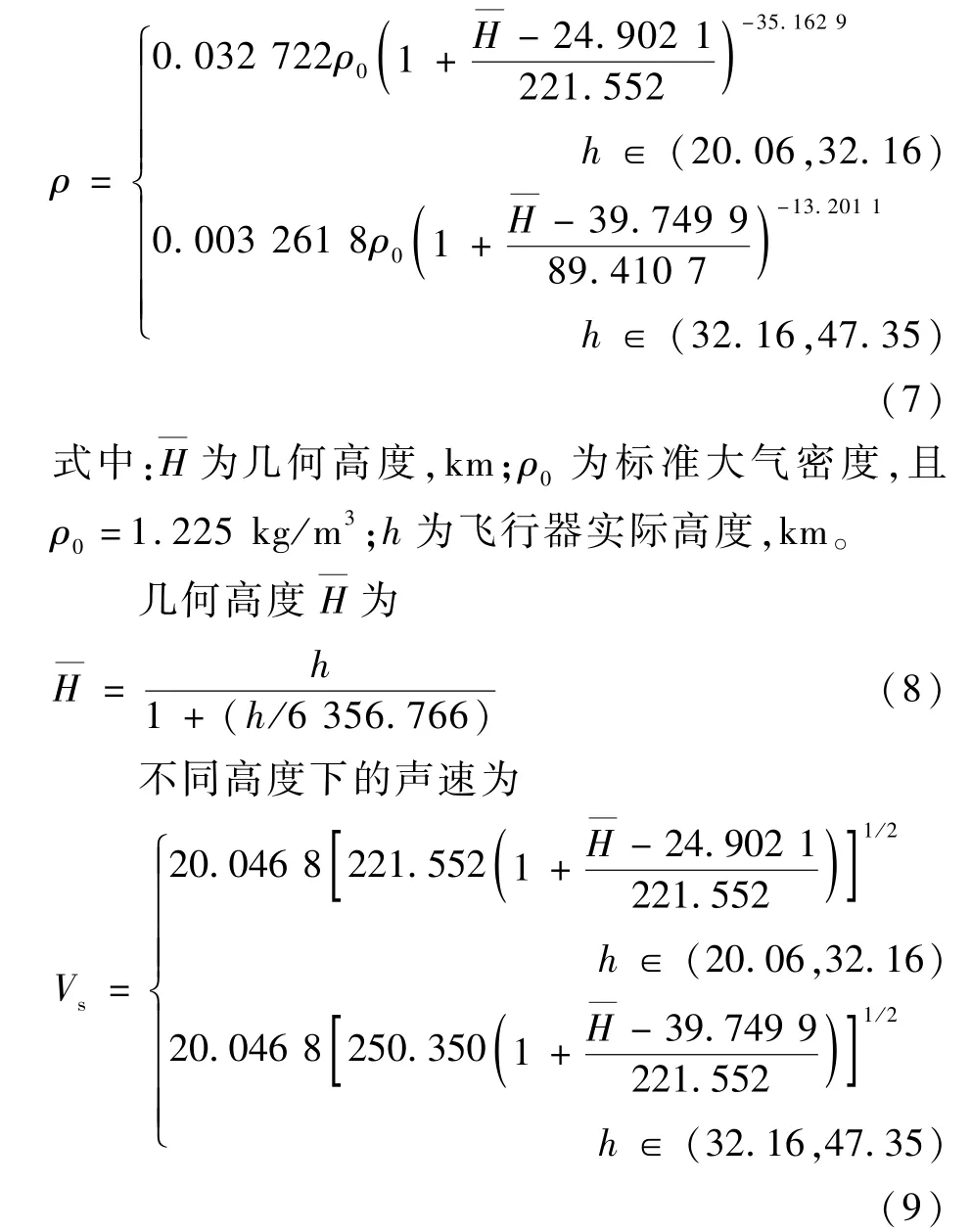
式中:马赫数Ma=V/Vs,V为飞行器实际飞行速度,m/s。
一般地,高超声速飞行器的升力系数CY主要受Ma、α、β、舵偏等因素影响,此处则需同时考虑变后掠带来的气动特性的变化。 图2 给出零舵偏情况下,在飞行器高度h=35 km、不同马赫数下,升力系数随迎角变化曲线。 可以看出,升力系数在不同迎角下随迎角变化基本呈正相关线性关系,同时随马赫数增大而减小。

图2 不同马赫数下升力系数CY 随迎角变化Fig.2 Variation trend of lift coefficient CY with angle of attack change at different Mach numbers
图3 为零舵偏、不同马赫数、固定构型下阻力系数随迎角变化曲线。 可以看出,阻力随迎角呈指数特征,且是正相关,同时阻力系数随着马赫数的增大而减小;图4 为不同马赫数下升阻比随迎角变化曲线。 可以看出,该构型下升阻比在一定范围迎角内呈现先增加后减少的特点,且最大升阻比在迎角为10°左右。

图3 不同马赫数下阻力系数CD 随迎角变化Fig.3 Variation trend of drag coefficient CD with angle of attack change at different Mach numbers
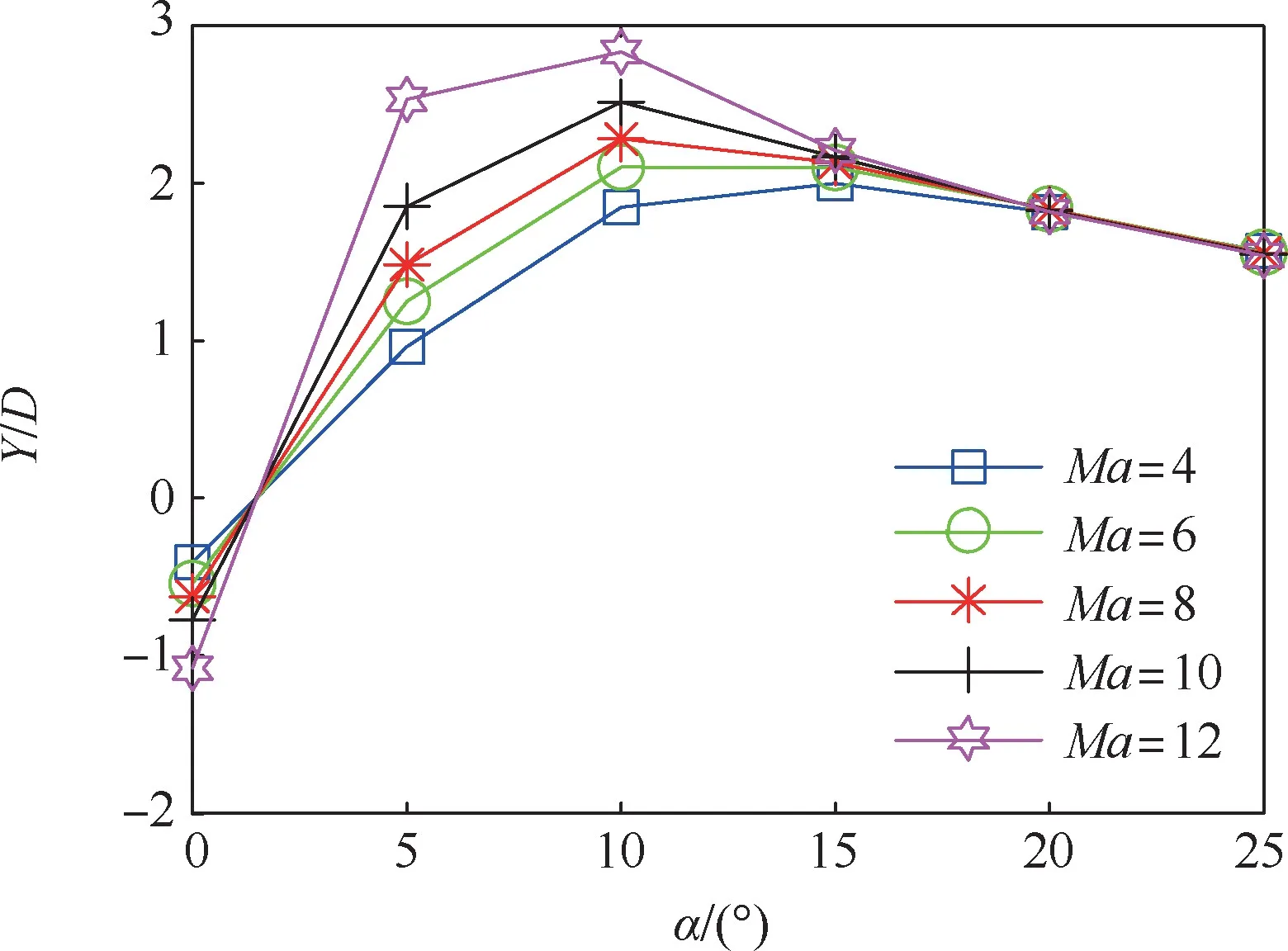
图4 不同马赫数下升阻比Y/D 随迎角变化Fig.4 Variation trend of lift-drag ratio Y/D with angle of attack change at different Mach numbers
图5 进一步呈现了在Ma=8 下,升阻比在不同后掠角下的变化曲线。 可以看出,不同构型下最大升阻比处于10°左右,同时根据可达到的最大升阻比来看,在后掠角处于45°时的构型下,最大升阻比为最优,相比于30°的情况下,最大升阻比可提升10% 左右。 鉴于以上分析,在构型为45°后掠、迎角为10°的情况下,飞行器处于最佳升阻比状态,有助于增加滑翔距离。 其他飞行速度下类似结论同样成立,本文不再具体阐述。

图5 不同构型下升阻比Y/D 随迎角变化(Ma =8)Fig.5 Variation trend of lift-drag ratio Y/D with angle of attack change with different configurations (Ma =8)
图6 为该变后掠飞行器在不同马赫数、不同构型下俯仰力矩系数随迎角变化曲线。 可以通过变化趋势看出该飞行器的纵向表现为静不稳定,且飞行器在不同构型下不会改变该飞行器的纵向静不稳特性,这也给控制系统带来了一定的挑战。
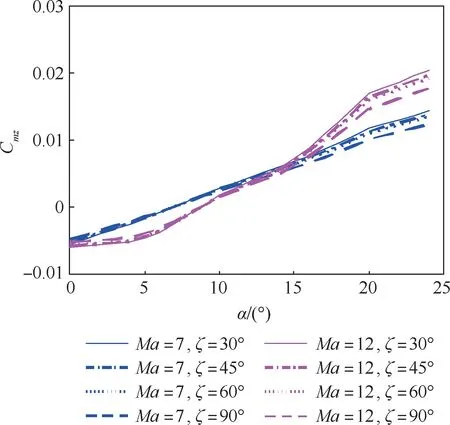
图6 不同构型下俯仰力矩系数Cmz随迎角变化(Ma =7,12)Fig.6 Variation trend of pitching moment coefficient Cmz with angle of attack change with different configurations (Ma =7,12)
2 控制器设计
2.1 变外形飞行器仿射非线性模型分析
当飞行器需要长时间的机动飞行时,需要通过不断地调整姿态来实现制导规划的再入轨迹,这一过程的控制物理量有迎角、侧滑角和倾侧角。控制目标即为:在存在参数摄动、风扰动和大尺度变形带来的大不确定环境下,所设计的控制律能够使得迎角α、侧滑角β、倾侧角μ准确跟踪给定的一阶导数有界的参考指令αc、βc、μc,同时,三通道角速度能够较好地跟踪角速度环的虚拟指令。控制方案框架如图7 所示。
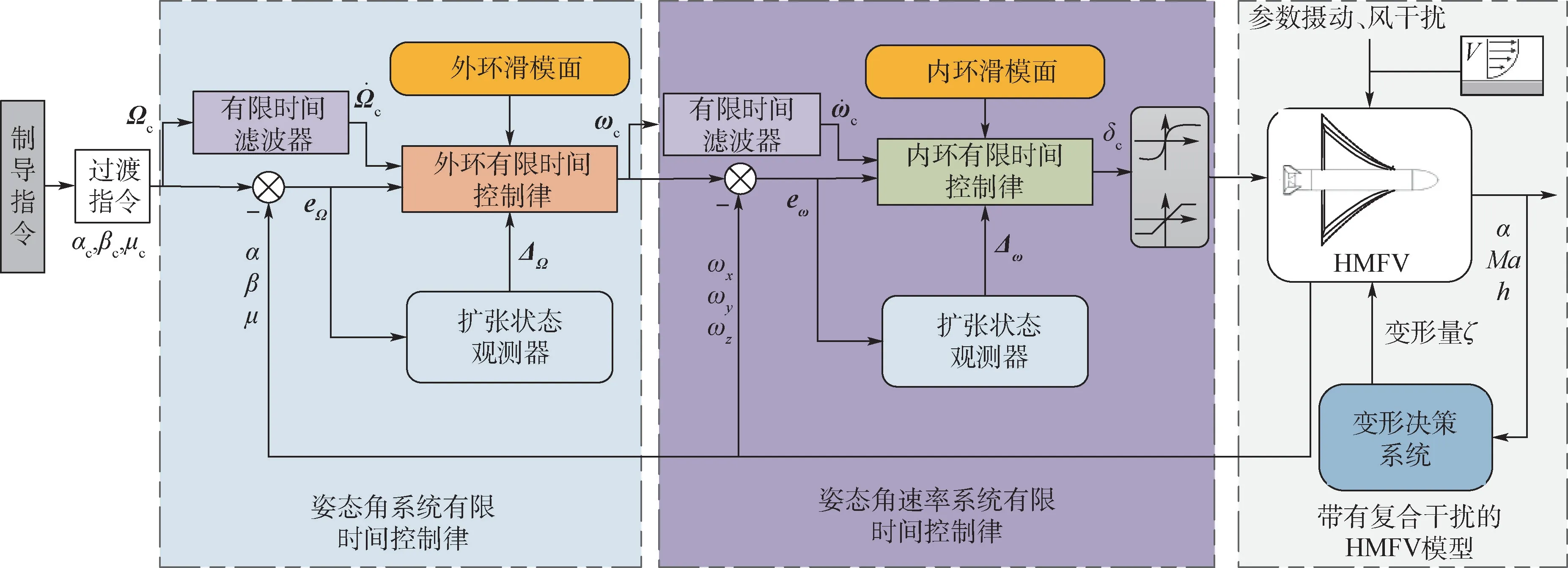
图7 HMFV 的有限时间收敛控制器方案框图Fig.7 Schematic diagram of finite-time convergence controller for HMFV
为了简化模型书写,本文定义:

将参数摄动带来的影响及持续性外界干扰等带来的综合扰动独立出来,则可以将式(11)和式(12)进一步简化为
2.2 有限时间控制律设计
在基于仿射模型设计控制律之前,给出相关定义和引理。


针对带有复合扰动的变外形飞行器仿射非线性模型(13)和(14),遵循时标分离假设,将飞行器的姿态模型划分为姿态角子系统(13)和姿态角速率子系统(14),即慢回路和快回路。
在姿态角系统中,姿态角速率ω作为虚拟控制量输入实现姿态角Ω= [α,β,μ]T有限时间稳定跟踪,即满足:

对式(25)求导,代入模型(24),则可得到姿态角系统的控制律为

对式(29)求导,代入模型(28),则可得到姿态角速率系统的控制律为

式中:U为姿态系统的期望力矩,则期望的三通道舵偏可由气动系数表反向插值得到。
定理2 针对系统(24)、(28),控制律设计为式(26)、式(30),且不确定性估计误差有界,则闭环系统是有限时间收敛的。 收敛时间满足:

根据文献[25],则存在最大收敛时间为

内环系统证明过程类似,本文不再赘述。
2.3 有限时间收敛指令滤波器
指令滤波是实际工程应用中不可缺少的部分,同时设计的控制律存在虚拟指令的微分项,易出现“微分爆炸”问题,因此,有必要设计一种收敛精度和速度更优的指令滤波器,相比传统的低通滤波器,受文献[26]启发,设计的有限时间收敛指令滤波器(finite-time convergence fliter,FTCF)具有更高的收敛精度和更快的收敛时间,可以同时用于指令滤波和微分计算,且参数设计简单,具备一定工程应用价值。
定理3 设计新型有限时间收敛指令滤波器如下:

式中:υ(t)为原指令;z(t)为指令滤波器输出;rz、κz1、κz2为滤波器待设计参数;τ为滤波器时间常数,取τ=0.5。
若参数设计满足rz>1,κz1≥1,κz2≥1,则跟踪误差ez=u(t) -z(t)有限时间收敛为一致有界。
证明 定义Lyapunov 函数:

通过调节参数κz1、κz2可获得期望的收敛时间。
若̇υ(t)≠0,且误差满足|ez| >1,则
2.4 基于双曲正切函数的扩张状态观测器
考虑带有不确定系统:
调节方式可参考文献[27]。
考虑系统(13)和(14),分别设计内外环系统的基于tanh 函数的扩张状态观测器。 针对系统(13),则有观测器如下:

至此,针对内外环系统的双曲正切扩张状态观测器设计完成。 内外环分别设计观测器参数,互不影响,选择适当的参数可实现状态的估计和复合干扰的估计,即实现

至此,带有扩张状态观测器和有限时间收敛指令滤波器的高超声速变外形飞行器姿态控制系统设计完毕。
3 仿真验证与分析
本节将针对系统,采用控制律、进行仿真验证与分析。 验证飞行器在滑翔飞行过程中,大范围改变飞行器后掠角的情况下,制导指令的跟踪情况;同时考虑变形速率的大小对飞行器姿态跟踪影响程度的不同,验证5 s 内和10 s 内完成变形2 种场景下的指令跟踪情况。 仿真中,暂不考虑变构型对其他方面的影响,该飞行器在滑翔过程中可根据飞行状态调整后掠角,变形决策系统仅考虑升阻比作为单一目标函数,以增程为唯一目的。 变外形飞行器的初始条件如表2 所示,飞行器的本体基本参数如表3 所示。

表2 变外形飞行器初始状态参数Table 2 Initial state parameters of HMFV

表3 变外形飞行器本体参数Table 3 Body parameters of HMFV
式中:仿真中Ti=0.1;ωn=1。
一方面,此类飞行器的建模存在许多假设和简化,变形过程难以准确描述;另一方面,流体力学相关分析软件理论上得到的气动参数与实际飞行过程中存在误差,都会导致模型不确定性大的问题,给定不确定模型描述为乘性形式,具体如表4所示。考虑飞行器飞行高度,根据工程经验,存在不可忽略的风扰动,风干扰对于飞行器的影响主要体现在速度、迎角和侧滑角3 个状态量。 假设风矢量为VW,在当地铅锤坐标系ox轴为正,定义风夹角为ϑw,分解为纵向风和横向风为VWx、VWy,得出合成速度V′,附加迎角Δα和附加侧滑角Δβ,如下:

表4 变外形飞行器不确定模型Table 4 Uncertainty model of HMFV %

注:由于风的大小与飞行器速度大小相比十分小,且重点研究姿态控制,忽略风对速度影响,仿真中只考虑风对迎角和侧滑角的影响。
控制器参数如表5 所示。

表5 有限时间收敛控制器设计参数Table 5 Design parameters of FTCC
以上就是仿真中的相关参数设置及不确定性环境模型设定,下面将进行3 种场景下仿真验证。
1) 场景A:验证有限时间收敛指令滤波器。
设计的有限时间收敛指令滤波器与文献[28]设计的指令滤波器在收敛时间和收敛精度上都有较大的提升。 如图8 所示,当̇υ(t) =0,即指令是恒定值时,较文献[28]方法,收敛时间可提升40%,收敛误差由10-1提升至10-2数量级。

图8 FTCF 滤波器定值指令(̇υ(t) =0)跟踪响应Fig.8 Tracking response of FTCF with constant command (̇υ(t) =0)
当̇υ(t)≠0 时,跟踪效果如图9 所示,误差如图10 所示,其最大误差为0.08,相比于TSTD 滤波器的0.25 亦有较大提升,FTCF 滤波器优越性体现更为明显。

图9 FTCF 滤波器变化指令(̇υ(t)≠0)跟踪响应Fig.9 Tracking response of FTCF with varying command (̇υ(t)≠0)

图10 FTCF 和TSTD(̇υ(t)≠0)跟踪误差Fig.10 Tracking error of FTCF and TSTD (̇υ(t)≠0)
2) 场景B:不同参数拉偏下的对比仿真验证。
场景B 的仿真主要是针对不同参数摄动及某一变形速率下的控制效果分析。 一般地,工程应用中希望能够尽快完成变形,然而对于执行机构而言,其变形的快速性受到气流及自身性能的约束,仿真中验证参数正负拉偏情况且变形时间为Tc=5 s 下的姿态控制效果。
图11 ~图13 为迎角、侧滑角、倾侧角在标称状态(无参数摄动和风干扰)、参数正拉偏(含风干扰)、参数负拉偏(含风干扰)状态下,且变形时间为Tc=5 s 的指令跟踪响应。 由于仿真阶段是滑翔段,变形决策系统简单地以升阻比最大为目标,此时后掠角从第15 s 由30°调整为52°(满足图5 的曲线趋势)。 由迎角响应曲线可知,在15 s有短暂抖动后,调整2 s 后即可收敛,验证所设计的控制器能够对参数摄动、风干扰、变形带来的综合扰动有较强的“容忍”能力。 在各类环境复合干扰下,迎角最大跟踪误差为0.02°,稳态误差为±0.005°;侧滑角在上述条件下跟踪误差最大为0.06°,这是由于变形带来的影响,同时,发现由于迎角在30 s 后变为6°,出发变形决策系统改变后掠角,导致35 s 处的误差为最大,变形结束后误差开始收敛;如图13 所示,由于气动热的问题,倾侧角常常以大角度翻转,倾侧角在3 种仿真条件下最大误差为1.1°,同样是处于15 s 和30 s变形开始处,误差有增大趋势,也是由于变形引起(见图14)。

图11 迎角跟踪性能Fig.11 Tracking performance of angle of attack
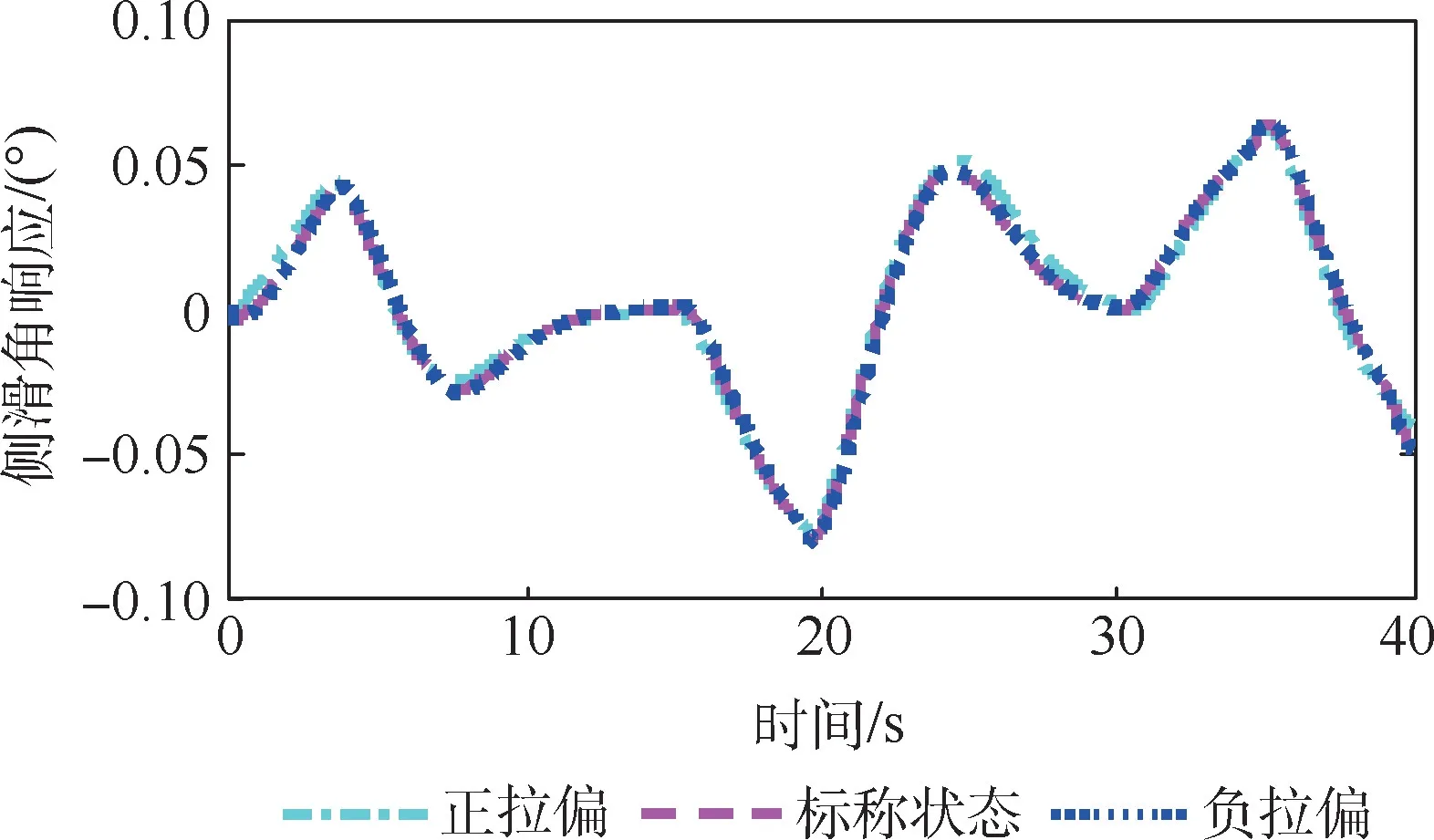
图12 侧滑角跟踪性能Fig.12 Tracking performance of sideslip angle

图13 倾侧角跟踪性能Fig.13 Tracking performance of bank angle
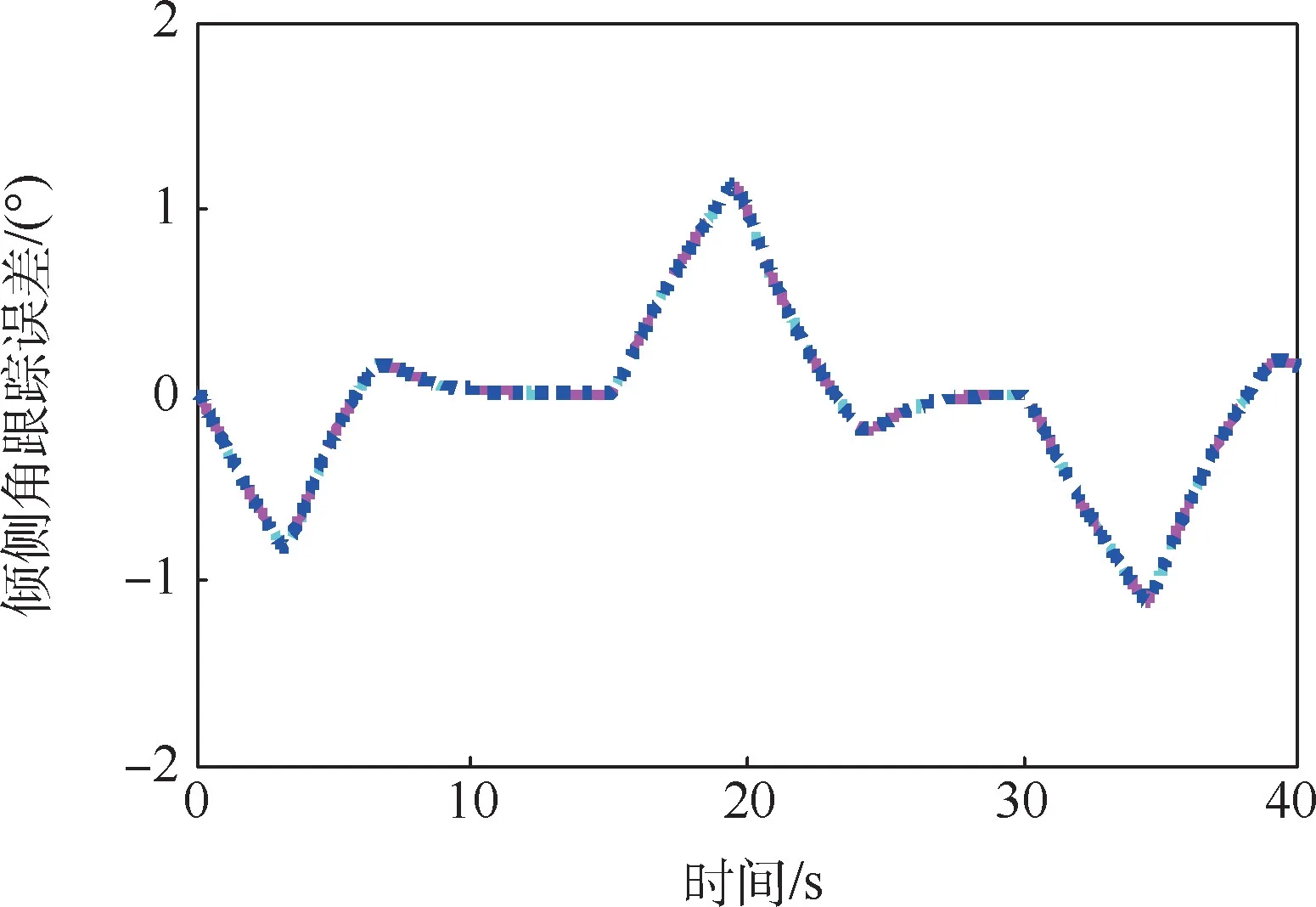
图14 倾侧角指令跟踪误差Fig.14 Tracking error of bank angle
3) 场景C:后掠角不同变化速率下对比仿真验证。
对于变后掠飞行器而言,变形对飞行器控制的影响主要体现在存在附加力和附加力矩,附加力影响主要体现在对3 个轴向分量的速度上,附加力矩的影响主要体现在对姿态的影响。 因此,忽略附加力的影响,主要考虑附加力矩对自控系统的影响,而附加力矩同时受到变形率和变形速率的影响。 因此,场景C 继续验证不同变形速率下,即变形周期为Tc=2,5,10 s 这3 种情况下的姿态控制效果。
图15 ~图17 为在设定的3 种变形速率下的姿态跟踪响应,图15 为相应的迎角跟踪误差,最大误差为0.13°,稳态误差为0.01°,相比于场景B 中的仿真结果,迎角最大误差和稳态误差都有增加,但是都能够达到满意的控制效果。 同时从误差图来看,变形时间只对短暂的跟踪效果有影响,且影响有限。 侧滑角和倾侧角的误差范围与场景B 中相似,这是由于变后掠对于横侧向的影响有限。

图15 不同变形速率下的迎角跟踪误差Fig.15 Tracking error of angle of attack with different morphing velocities
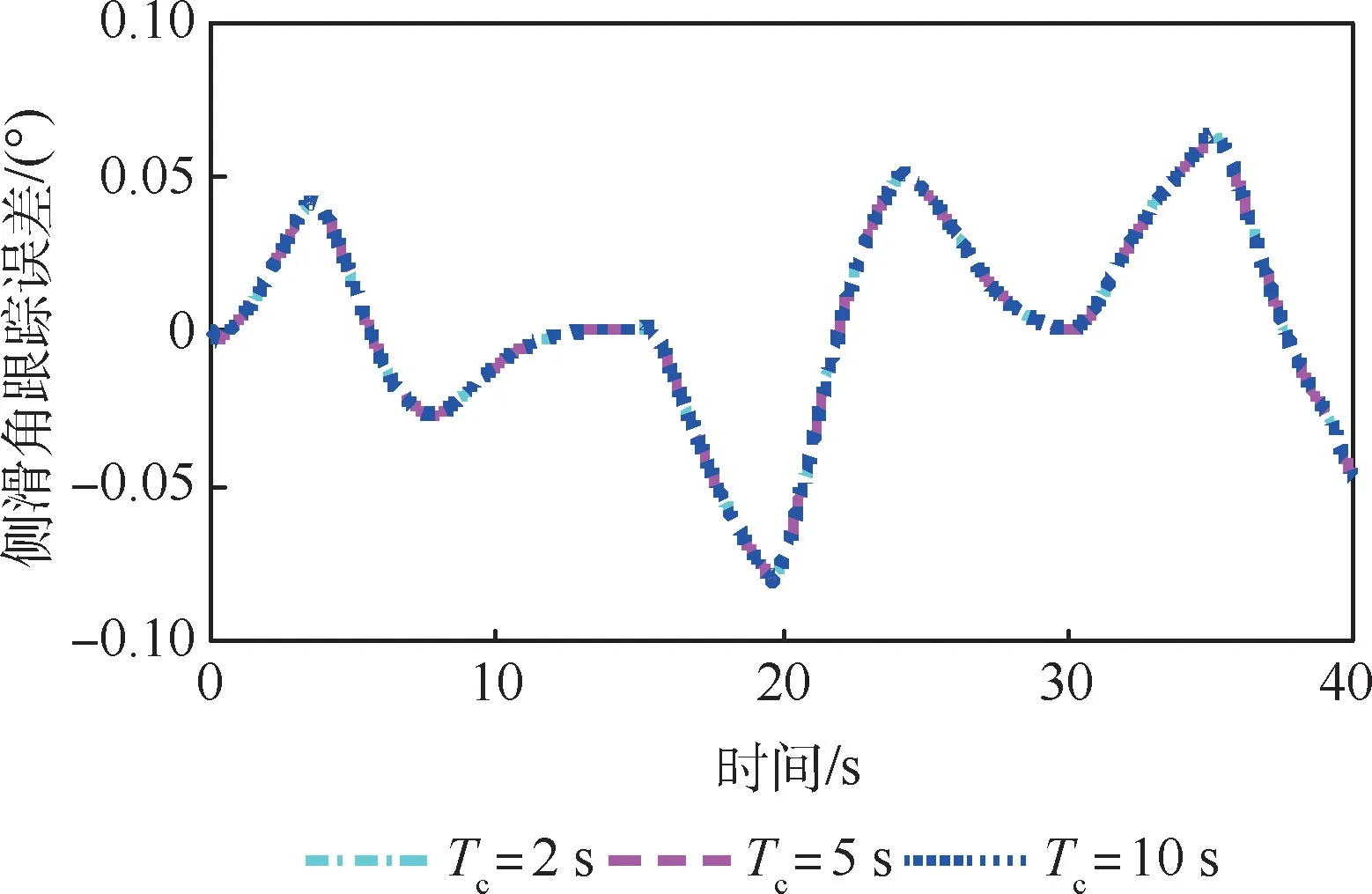
图16 不同变形速率下的侧滑角跟踪误差Fig.16 Tracking error of sideslip angle with different morphing velocities

图17 不同变形速率下的倾侧角跟踪误差Fig.17 Tracking error of bank angle with different morphing velocities
从场景C 的仿真验证中可知,在设定的3 种变形速率下,迎角受到变形速率影响较大,侧滑角和倾侧角影响较小,但是所提方法仍然能够有效应对变外形飞行器变形带来的挑战。 需要说明的是,变形的快慢应由执行机构的特性及工程需要来决定,本文仅作为验证条件使用。
针对3 种变形速率,三通道舵偏如图18 ~图20所示,都能够满足仿真给定的约束条件。

图18 不同变形速率下的滚转通道舵偏δx 响应Fig.18 Response of deflection angle δx with different morphing velocities

图19 不同变形速率下的俯仰通道舵偏δz 响应Fig.19 Response of deflection angle δz with different morphing velocities

图20 不同变形速率下的偏航通道舵偏δy 响应Fig.20 Response of deflection angle δy with different morphing velocities
需要说明的是,从三通道的舵偏响应来看,由于在仿真初始就给了一个大的参数摄动及风扰动,三通道舵偏有一个激烈的震颤,当稳定后则较为平滑,同时,在15 s 和30 s 处都有一个较为明显的变化,分析是由于指令切换和变后掠决策系统发出变形指令共同导致的结果。
综上所述,根据仿真结果可见,在考虑强不确定性参数摄动影响下,同时考虑持续风干扰,在变外形飞行器变形过程中,控制器仍然能够保证飞行器控制性能,并且满足提出的执行机构约束条件。
4 结 论
针对HMFV 飞行器大范围变形带来的参数摄动大、变形过程建模难、外界干扰等大不确定性问题,研究了变后掠飞行器建模与姿态控制问题。相比于传统建模,基于多体动力学的方法,建立了变外形飞行器含有变形量影响的面向姿态控制的三自由度模型,该模型含有变形量和变形速率,能够更好地反映出变形对飞行器的内在影响。 分析了变外形飞行器在典型状态下的气动特征,得出在给定某一马赫数、某一高度下的最大升阻比的最优迎角,为后续仿真中的简易变形决策系统做支撑;同时,针对连续变形关键气动数据,给出了一类可行处理方案,具有一定的通用性。 在控制律的设计当中,针对可连续变形的飞行器设计了一套有限时间收敛控制方案。 进一步考虑控制律中用到的指令微分项,设计了有限时间指令收敛滤波器,其在收敛速度和收敛误差2 方面都有更优的性能。 利用扩张状态观测器,可以较好地估计不可测量状态和“综合扰动”。 以考虑复杂干扰下的HMFV 为对象执行仿真,并在仿真中加入执行机构的动态特性和约束的影响,结果表明,所设计的控制方案可解决不同变形速率下、存在复合干扰的飞行器姿态控制问题,具有一定的工程意义。
仍然存在以下问题:变形决策系统仅以最大升阻比为单一变形原则,未考虑到变形带来的气动特性变化、稳定性变化等综合效益,这也是将后续研究的重点之一。 针对变形带来转动惯量、质心等处理较为简化,可进一步通过细化变形特征点,掌握更为精确的变化规律进行拟合。
