基于功耗残差的航天器CMG 退化特征提取方法
2022-11-09田利梅龚梦彤唐荻音韩丹阳于劲松李春伟
田利梅 龚梦彤 唐荻音 韩丹阳 于劲松 李春伟
(1. 北京控制工程研究所, 北京 100094; 2. 北京航空航天大学 自动化科学与电气工程学院, 北京 100083)
控制力矩陀螺(control moment gyro, CMG)是大型航天器进行快速机动和高精度姿态控制的关键执行机构[1],其严重性能下降、部分功能丧失和意外失效,往往会使航天器姿态控制功能受到极大影响,甚至威胁整器的姿态安全和使用寿命。CMG 产品包含高速旋转机械、支撑驱动组件、轴承、电机、传动机构、导电环等多级部件,是最为复杂、制造难度最高的空间机电产品之一。 其中,高速转子轴承是CMG 最核心的部件,直接决定了CMG 的寿命。 因此,及时掌握并预测高速转子轴承的性能退化状态成为预警CMG 意外失效的关键。
CMG 在长期服役过程中,高速转子轴承将不可避免地发生退化,如磨损、腐蚀、疲劳剥落等,进而对力矩的稳定输出造成影响。 因此,提取有效退化特征是预测高速转子轴承的必要且关键环节。 文献[2-3]总结了现有研究中轴承退化特征的提取方法,主要分为2 类:①利用统计方法或信号处理方法从传感器监测信号中直接提取具有物理意义的退化特征,参见文献[4];②利用数据融合算法将多传感器信息或统计特征进行融合以构造能够描述退化趋势的虚拟特征,参见文献[5]。
但是,现有文献中的绝大多数方法均以振动信号作为分析对象,从原始振动数据或其时频域特征中归纳轴承性能退化指标,这些方法无法适用于航天器CMG。 由于高速转子的真空工作条件要求,CMG 转子系统中不设置加速度传感器或力传感器,转子旋转时的振动信号无法采集。 此外,由于全向测控天线通信带宽限制,CMG 运行过程中各类原始信号的采样频率较低,无法提取有效的频域特征,使得电机电流特征分析(motor current signature analysis, MCSA)[6]等方法同样难以应用。 由于控制系统的调节作用,设备早期退化或环境因素造成的系统扰动将被掩盖,导致CMG 功能失效的最终指标——转子转速在失效前始终能够保持稳定,进一步增加了CMG 退化特征提取的难度。
CMG 转子系统中旋转质量本体受转子电机直接驱动,控制系统通过调节转子电机的输出力矩以保证高速转子具有恒定的角动量,因此,由退化导致的转子运动状态变化将通过控制系统映射到驱动端。 转子电机用于提供维持高速转子运动的全部能量,随着轴承发生退化,转子的运动特性发生改变,转子电机的总功耗与健康阶段相比将出现偏差。 因此,本文从系统级功耗角度出发,通过模型对健康状态下单位时间内的转子电机总功耗进行估计,并将模型输出与退化状态下电机功耗的残差作为CMG 退化特征,从而实现趋势性指标的构建。 由于CMG 具有组成结构复杂、工作环境恶劣、工况多变、实验成本高等特点,精确的功耗模型难以建立。 因此,本文采用物理模型与数据驱动模型结合的方法,先通过物理原理分析得出CMG 转子运动状态(如转子转速等)与电机功耗之间的定性关系,再通过数据驱动模型建立传感器测量数据与功耗之间的定量映射,最后通过残差构建CMG 退化特征。 采用某型号CMG 的地面实验数据验证了本文方法的有效性。框架转速;Jr为转子的转动惯量;Ω为转子自旋角速度。
CMG 工作过程中,保持高速转子的自旋角速度不变,通过改变框架的转动角速度来改变输出力矩的大小。
为保证CMG 良好的输出力矩特性,需令高速转子具有髙稳定度的恒定角动量。 CMG 转子系统中,转子电机直接驱动转子旋转,忽略一些影响较小的力矩,如电机的齿槽转矩等,转子系统的运动方程可表示为
1 CMG 退化特征原理分析
根据框架自由度,CMG 可分为单框架与双框架2 类。 本文以单框架控制力矩陀螺(single gimbal CMG, SGCMG)为研究对象,其基本组成如图1所示,输出力矩可表示为[7]
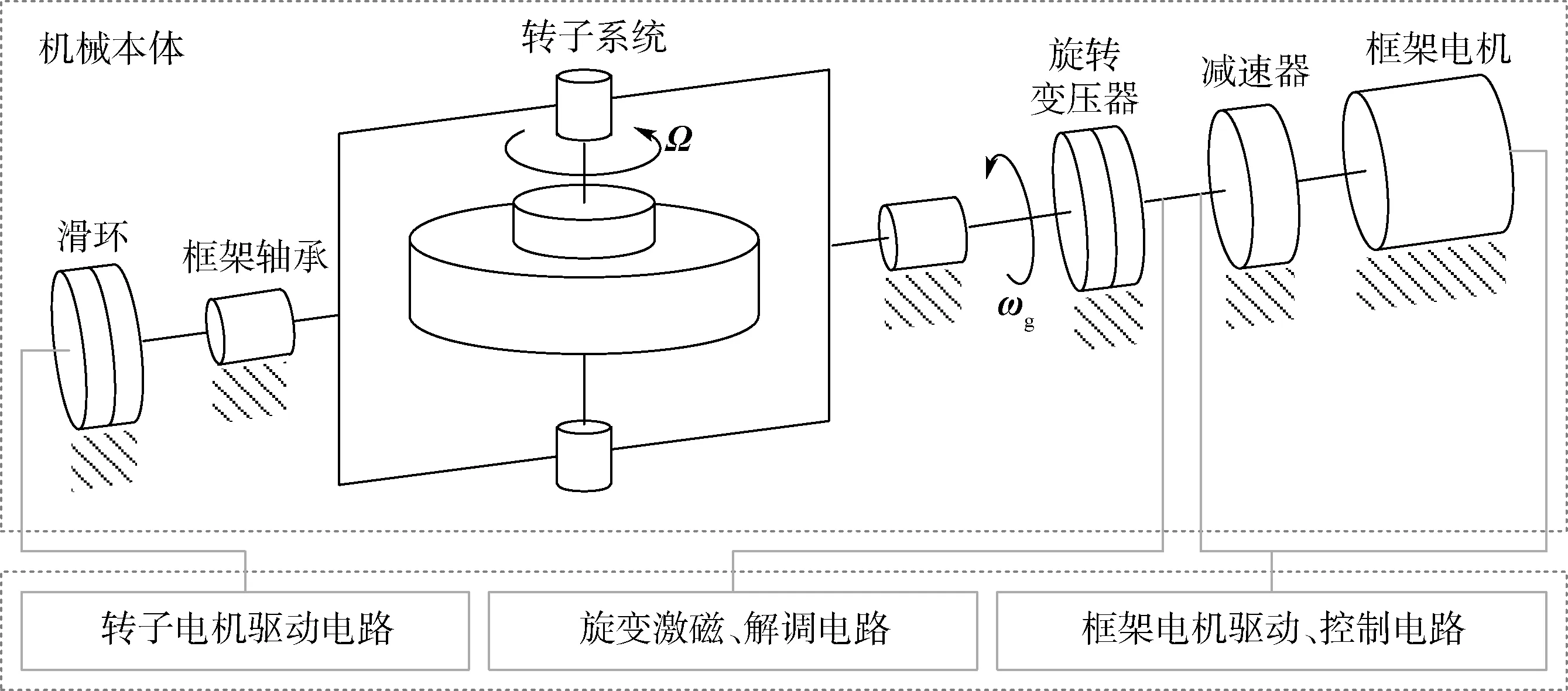
图1 SGCMG 结构简图Fig.1 Structure sketch of the SGCMG

式中:M为输出力矩;H为转子的角动量;ωg为
式中:ωr为转子电机的角速度,由于电机转子与旋转质量本体固连,有ωr=Ω,下文中均采用ωr进行统一表示;Pele为转子电机消耗的总功率;PFe为转子电机的铁芯损耗;PCu为转子电机的绕组损耗;Ped为转子电机的涡流损耗;Pd为轴向干扰力矩引起的功率损耗;Hf为转子支承轴承的摩擦功耗。
对于摩擦功耗Hf,参考Palmgren 经验模型与SKF 经验模型[8-9],在不考虑轴承退化的情况下,转子轴承摩擦力矩仅由电机转速ωr与环境温度T决定。 干扰力矩Md的来源可分为2 部分:一部分是由于转子不平衡导致的、由高速转子旋转来传递的干扰力矩;另一部分是框架旋转所产生的耦合力矩。 因此,干扰力矩与高速转子转速ωr和框架转速ωg有关[10-11]。 在忽略电机绕组损耗的情况下,转子系统的电磁损耗仅与电机转速ωr有关[12-13]。 综上,式(3)中的第2 部分可简化为以CMG 运行状态参数ωr、ωg、T为变量的函数:

基于上述损耗功率与运行状态参数的相关性分析,可得到kΔT时段内转子系统的功耗方程:

根据转子系统工作机理的定性分析可知,一段时间内转子电机的总功耗不仅与转子运动状态有关,还受到工况与环境条件的影响。 因此,即使在转子转速不变的情况下,仅通过转子电机功耗仍然无法衡量系统的退化程度。 为综合不同因素对转子电机功率的影响,根据式(5)建立健康状态下转子系统的功耗模型,并根据模型输出与退化状态下电机功耗的残差构建CMG 退化特征。 具体而言,式(5)描述的输入输出关系仅在CMG 未退化或同一退化阶段内成立,当CMG退化程度发生改变时,该映射关系将会发生变化,而利用原模型得到的功耗估计值将与真实值之间产生偏差,因此可根据该偏差构造CMG退化特征。
2 CMG 退化特征提取方法
2.1 基于CNN 与功耗残差的退化特征提取


卷积神经网络(convolutional neural networks,CNN)作为最有效的深度学习方法之一,近年来在故障诊断与预测领域的应用逐渐增加[14]。 相较于二维卷积,一维卷积能够更好地处理时序信号[15],因此采用一维卷积层构建数据驱动模型。网络结构如图2 所示,其包含1 个输入层、3 个卷积层、3 个池化层及2 个全连接层。 通常,数据驱动模型与机理相结合能够使建模过程更加高效,因此,在网络中增加了基于转速数据手动构造的功耗特征作为补充输入,旨在令数据驱动模型的建模思路与机理模型更为接近。 单位时间内转子电机转速ωr、转子加速度̇ωr、框架转速ωg与温度T数据构造的多通道时序信号被作为网络初始输入,卷积层与池化层用于学习深层特征,最终的全连接层用于实现特征融合并估计该时段内电机总功耗Eele。
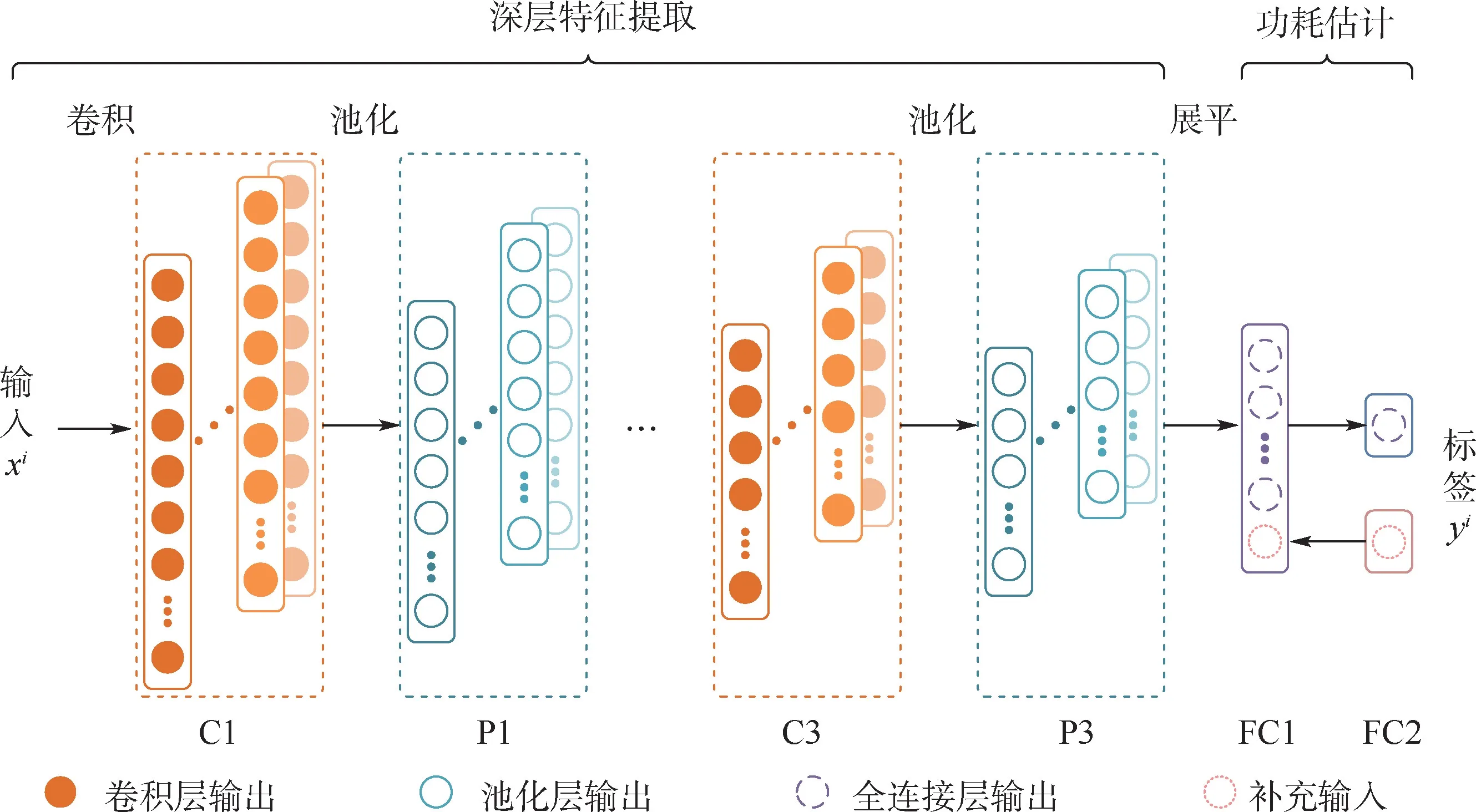
图2 CNN 网络结构示意图Fig.2 Architecture of CNN network
输入层由CMG 运行状态数据构成,与卷积层C1 相连。 一维卷积层是网络模型的核心结构,其中包含一组可通过学习调整权重的卷积核,在每次卷积运算中,卷积核仅覆盖数据通道的一个子区域。 设In,m表示第m层的第n个数据通道,Nm表示通道数量,则In,m可被划分为Ij:j+Lkern,m, 其中,Lker为卷积核的长度,j为数据通道中的第j个数据。 一维卷积运算可定义为卷积与池化操作能够从CMG 运行状态数据中学习深层特征,而全连接层被用于建立深层特征与转子电机总功耗之间的非线性映射关系。 全连接层FC1 用于将池化层P3 的输出展平,而FC2层与FC1 层相连,其输出为


2.2 退化特征评价指标
为评估CMG 退化特征的性能,采用趋势性与单调性2 个通用指标对其进行量化。 其中,趋势性用于评估特征退化趋势与运行时间之间的相关性[16],单调性用于评估特征单调上升或下降的趋势[17],二者可通过式(11)和式(12)描述:

上述指标评价了退化特征的2 个不同属性,为了在不同指标间做出平衡,通过线性加权构造了一个综合指标以评价退化特征的性能:
式中:HM∈[0,1]为退化特征的综合评价,其值与退化特征的性能呈正相关;ωi为单一指标在综合指标中的占比,考虑到单调性对于退化特征更加重要,ω1与ω2分别被设置为0.3 与0.7。
3 实验验证与分析
3.1 原始数据描述与时域特征分析
本文以北京控制工程研究所某型号SGCMG的加速寿命实验数据为例进行分析验证。 该CMG 最大输出力矩为15 N·m,实验方案为以正弦指令曲线设定框架角速度,使转子产生周期性摆动。 设备如图3 所示,实验过程中记录的遥测数据包括低速组件轴温、高速电机电流、高速组件转速、低速电机电流、高速组件轴温、低速组件壳温、高速电机电压、电源电压与电源电流等。 采样时间为2017 年3 月2 日至2018 年10 月31 日,其间经过多次断电重启,采样频率为8 Hz,为了减小数据量,对原始信号通过每分钟取平均的方式进行下采样。 部分数据的原始曲线如图4 所示。 需要注意的是,遥测数据的真实物理量目前不便提供。 图4 中展示的数据为传感器原始输出,其值与真实物理量之间存在明确的映射关系,能够体现退化过程中的参数变化趋势。
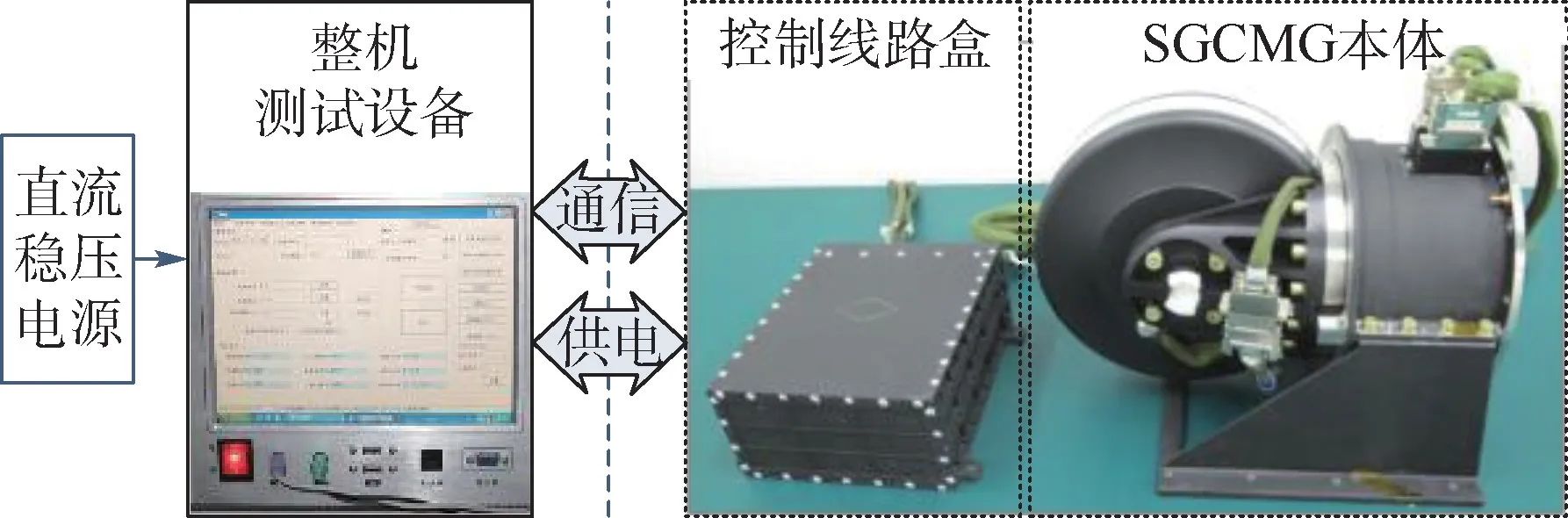
图3 SGCMG 实验平台Fig.3 Experiment platform of SGCMG

图4 遥测数据示例Fig.4 Raw data telemetry signals
地面实验期间,CMG 工况可根据框架转速的变化进行划分,本文采用数据量最为充足的2 种工况进行实验验证:①幅值为60°/s 的摆动实验;②幅值为20°/s 的摆动实验。 为了约简模型输入并降低训练难度,根据工况对式(5)进行分解。由于每种工况中框架运动状态保持不变,可将输入通道中的框架转速ωg省略。
为了证明仅通过转子电机功率数据难以构建CMG 性能退化指标,以1 h 为单位时间提取2 种工况下功率数据的时域特征,包括均值、均方根值、峰峰值、偏度、峭度、波形指数、峰值指数、裕度指数、峭度指数等[18]。 表1 记录了上述特征的性能指标得分。 根据结果可知,转子电机功率数据及其时域特征的趋势性与单调性均较差,无法直接作为CMG 的退化特征。

表1 退化特征性能对比Table 1 Comparison of degradation indicators performance
3.2 CMG 退化特征提取
为得到不同工况下CMG 退化初期的转子系统功耗映射关系,取各工况下遥测数据的前1/4构造训练集与验证集(比例3 ∶1)。 在每个样本中,1 h 内的转子电机角速度ωr、角加速度̇ωr与温度T被用于构造3 通道时间序列输入,基于ωr构造的功耗特征被作为补充输入,转子电机功耗Eele被设置为标签。 其中,̇ωr可通过“高速组件转速”差分计算,电机功率Pele可近似为“高速电机电流”与“高速电机电压”的乘积,T取为“高速组件轴温”。 训练过程中,当验证集的损失函数在30 个周期内不再下降时即停止训练。
模型训练完成后,将各工况下遥测数据的后3/4 送入神经网络模型以得到转子电机功耗的估计值,结果与真实值的比较如图5 所示。 图6 展示了功耗残差即退化特征的曲线。 其中,工况1对应了CMG 运行初期的4 800 h,而工况2 对应了CMG 失效前的2 040 h。 随着运行时间的累计,转子电机的功耗残差呈现上升趋势,体现了转子系统功耗关系的变化程度随轴承退化而逐渐增大。 此外,能够观察到退化特征在系统运行初期平稳上升而在失效前出现严重抖动,该现象表明转子轴承的退化将对CMG 系统稳定性产生影响,当扰动超出控制系统的补偿范围时CMG 失效。

图5 模型训练与功耗估计结果Fig.5 Results of model training and power consumption estimation
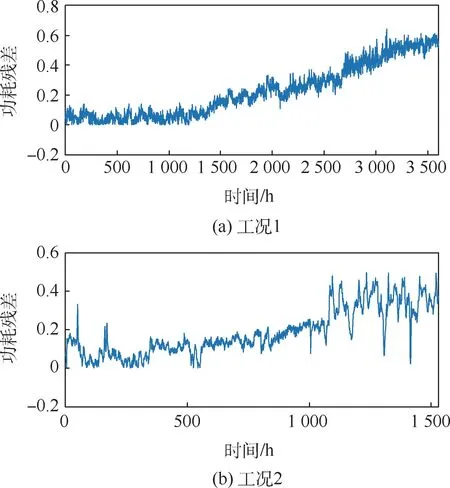
图6 转子电机功耗残差Fig.6 Residual power consumption of rotor motor
3.3 退化特征评估与比较
采用2.2 节的性能指标对功耗残差进行评价,表1 中的结果表明,该特征在趋势性和单调性方面显著优于原始功率信号的时域特征。 作为对比,采用PCA 对转子电机功率的时域特征进行降维,并根据未知状态与早期退化状态之间的偏离程度构造CMG 退化特征[18-19]。 该过程中,各工况遥测数据的前1/4 被视为早期退化数据,通过PCA 进行特征降维后前3 个主成分的总贡献均超过90.27%,故在三维主成分投影空间计算未知状态与早期退化状态之间的距离,计算方法参考文献[20]。 表1 中记录了该特征的性能指标得分,由于各时域特征均不存在明显的退化趋势,通过数据融合得到的结果在趋势性与单调性方面没有显著提升,仍难以实现性能指标的构建。
实际上,根据转子电机功耗残差定义的退化特征在构建过程中不仅考虑了信号自身的时序信息,还体现了转子系统功耗关系的变化过程,这与设备的退化机理更为符合,因此与其他特征相比得到了最好的性能指标结果。
4 结 论
为实现航天器CMG 性能退化过程的量化表征,本文提出了一种基于CNN 与功耗残差的退化特征提取方法,通过建立健康状态下CMG 转子电机的功耗模型,并计算退化状态下实际功耗与模型输出的残差构建CMG 的退化特征。 该方法不依赖振动信号或频域分析,大大降低了对原始数据的要求。 验证结果表明,在信号包含强噪声且无退化趋势的情况下,由该方法构建的退化特征在单调性与趋势性方面均优于时域分析方法,能够更加直观地体现CMG 的性能退化过程。
为提升该方法的实际应用价值,后续将针对其在异常检测与剩余寿命预测方面的应用开展研究。
