船用防爆型助力液压搬运车的设计与应用
2022-10-30李金通
郭 奎, 李金通, 王 琦
(1.92942 部队, 北京 100161; 2.91395 部队, 北京 102401)
0 引言
随着船舶行业的快速发展, 各型船舶上的机械设备也越来越多样化,部分多用途型船舶在运输柴油、航空燃料油等物资的同时,也会携带小型集装箱、货框等形式的物资, 集装箱或货框需要由叉车等机械设备进行叉装运输、堆垛等,并且,因船上空间有限,对叉车等机械设备的大小也有限制,使其能满足在小型空间内使用,具备能够原地旋转等功能,又因携带了部分油气资源,在船上某些位置会出现油气混合区,这样就会形成防爆区域。根据防爆区域要求,此类防爆区一般为Ⅱ类防爆区,在此区域工作的设备要求具备防爆功能。 本文依据助力液压搬运车的防爆性能、使用要求等方面的技术要求,进行了分析和设计。
1 组成
根据船舶上助力液压搬运车的使用要求,其主要组成由车体、 框架总成、驱动轮总成、 电气控制系统、液压控制系统等组成。 其外形图见图1。
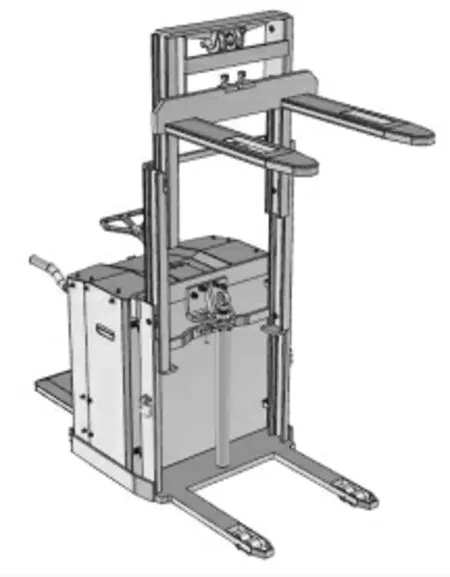
图1 助力液压搬运车外形图
2 设计原理
该型助力液压搬运车采用电液一体化设计, 采用蓄电池组提供动力源,电机提供动力,电机驱动液压泵,液压泵带动液压马达再驱动行走轮使搬运车行走, 可实现速度指标内的无级变速。 货叉的起升与降落由液压控制,推动液压油缸上下运动升降货叉和货物。 操作手柄既是整车行走开关也是转向操作的方向杆。 具有省力、 效率高、运行平稳、操作简单、安全可靠、噪音小,无污染等特点。 其液压系统和电气控制系统原理如下:
2.1 液压系统
叉车行走及提升方式采用液压驱动, 液压系统主要由泵、防爆电磁阀、调速阀、单向阀、溢流阀、行走马达、提升油缸液压管路附件等组成。
液压系统油源由泵供给,经由防爆电磁阀,控制行走马达、 提升油缸两种执行元件。 为保证装卸过程工作平稳,提升油缸安装调速阀,控制提升速度调节,可避免冲击,有利于保护油缸,提高系统可靠性。
2.2 电气系统
整车电气系统主要包括防爆电源控制系统、 防爆蓄电池组、防爆电机控制器、交流防爆电机、防爆防腐操作柱及线束。电源控制系统及电机控制器采用Q235 材质防爆壳进行隔离防爆,防爆壳防爆等级满足2 区ExdⅡBT4 Gc。 选用3KW 三相交流防爆电机,电机防爆等级满足2区ExdⅡBT4 Gc。 启动及急停操作柱选用防爆操作柱,防爆操作柱防爆等级满足2 区ExdⅡCT6 Gc。蓄电池防爆箱和电机内均设有温度传感器,达到设定保护温度自动停机。
其中防爆电池组由16 块单体电池组成,工作方式采用串联形式,额定电压为48V,额定总容量为100AH,由电源管理系统对其进行管理, 电源管理系统主要功能是保障蓄电池组安全的充放电工作。 管理系统可实时监测蓄电池组的单体电压、单体温度、系统充放电电流,计算蓄电池组剩余容量。当系统出现过压、欠压、过温、过流等非正常情况时,系统报警并同时切断电池主回路。
助力液压搬运车的电气系统、 液压系统通过多个折弯支架、框架结构实现上述两个系统与车体的连接,最终为整车提供动力,实现整车行走、转向、转运、举升、堆码等功能。 并根据其防爆性能要求,采用了导静电轮胎、防爆操作手柄等。
3 分析与计算
助力液压搬运车在工作过程中, 要承受堆码的重量,根据其承载重量对其进行受力分析,结合助力液压搬运车的使用环境,本文分析只针对转弯时的操作受力分析及船舶航行过程中的满载使用状态进行分析计算,航行时满载状态下是助力液压搬运车使用的极端条件,在该条件下能够满足使用要求,则其他情况下也能够满足使用要求。
3.1 平面状态下满载时转弯受力分析
计算相关基础数据:
车身自重: G=1300kg;
前轮两轮中心距离:L1=0.7m;
重心偏离中心轴线距离:L2=0.039m;
重心距离地面高度:H=0.4396m;
驱动轮与前轮中心距:L=1.14m;
最大行驶速度:vmax=0.7m/s;
最大转向角:θ=30°;
对助力液压搬运车转弯时进行运动分析得, 助力液压搬运车进行左转向时相比于右转向时更容易发生侧翻情况,因此对左转向时进行受力分析,受力分析图见图2。
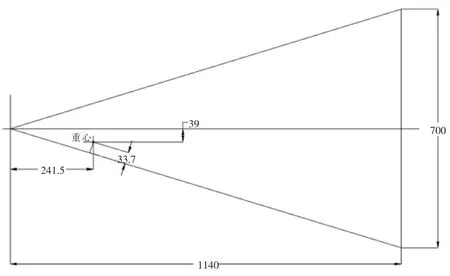
图2 空载时左转向受力分析图
通过受力分析图分析得, 左转向发生侧翻的临界状态为内侧支撑轮(左前轮)提供的支撑力为0,即F1=0,经计算:
根据力矩平衡:G·g×0.0337=F离·H;(对外侧支撑轮(右前轮)着地中心点计算力矩)
经计算得:n=1.8, 因此助力液压搬运车空载左转弯时不会发生侧翻,满足使用要求。
3.2 平面状态下满载时转弯受力分析
对助力液压搬运车转弯时进行运动分析得,助力液压搬运车进行左转向时相比于右转向时更容易发生侧翻情况,因此对左转向时进行受力分析,受力分析图见图3。

图3 满载时左转向受力分析图
通过受力分析图分析得, 左转向发生侧翻的临界状态为内侧支撑轮(左前轮)提供的支撑力为0,即F1=0,经计算:
根据力矩平衡:G·g×0.0337=F离·H;(对外侧支撑轮(右前轮)着地中心点计算力矩)

经计算得:n=2.3>1, 因此助力液压搬运车满载左转弯时不会发生侧翻,满足使用要求。
3.3 船舶航行过程中空载状态下的受力分析
助力液压搬运车在驱动轮两侧设计有离地高度为5mm 的万向轴承,其宽度与前支撑轮宽度相同,在助力液压搬运车行驶时驱动轮与一前支撑轮锁链直线为助力液压搬运车侧翻的倾翻轴线, 此轴线为助力液压搬运车的一级安全轴线, 万向轴承与其对应前支撑轮组成的轴线为二级安全轴线,在实际使用过程中,若在二级安全轴线下发生失稳,则判定为助力液压搬运车失稳。
在进行空载坡面行驶转弯时发现一级安全轴线已失稳,因此对助力液压搬运车二级安全轴线进行校核。
坡度:α=8.53°;(设计指标要求车辆爬坡度15%,按8.53°计算);对助力液压搬运车转弯时进行运动分析得,助力液压搬运车进行左转向时相比于右转向时更容易发生侧翻情况,因此对左转向时进行受力分析,受力分析图见图4。
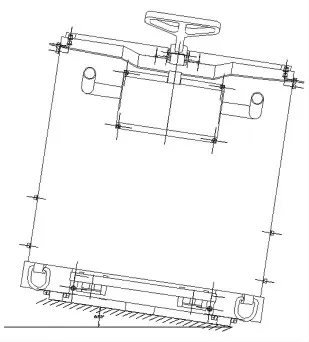
图4 空载时坡面左转向受力分析图
通过受力分析图分析得, 左转向发生侧翻的临界状态为内侧支撑轮提供的支撑力为0,即F1=0,经计算:
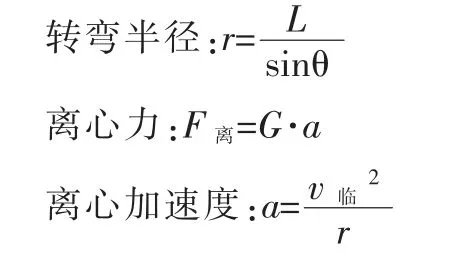
离心力:F离=G·a

根据力矩平衡:G·cosα·g·(L2-H·tanα)=F离·H/cosα(对倾翻轴计算力矩)
经 计 算 得:n=4.85,因此助力液压搬运车坡面行驶转弯时不会发生侧翻,满足使用要求。
在进行载重作业时,由于重物使整车重心前移,重力作用力臂增加,重力防止整车倾翻的力矩增加,所载重物对整车稳定系统起正作用,即更为稳定,因此不进行校核。
3.4 船舶航行过程中满载状态下的受力分析
助力液压搬运车在驱动轮两侧设计有离地高度为5mm 的万向轴承,其宽度与前支撑轮宽度相同,在助力液压搬运车行驶时驱动轮与一前支撑轮锁链直线为助力液压搬运车侧翻的倾翻轴线, 此轴线为助力液压搬运车的一级安全轴线, 万向轴承与其对应前支撑轮组成的轴线为二级安全轴线,在实际使用过程中,若在二级安全轴线下发生失稳,则判定为助力液压搬运车失稳。
在进行空载坡面行驶转弯并伴有横摇时发现一级安全轴线已失稳, 因此对助力液压搬运车二级安全轴线进行校核。
助力液压搬运车转弯时自身离心加速度:a1
垂直补给所需航速和海况条件下船的横摇最大角加速度为1.09°/s2、甲板距船底高度8.8m,计算得船横摇加速度最大为:
a 横摇=1.09×π÷180×8.8=0.167m/s2
对助力液压搬运车转弯时进行运动分析得, 助力液压搬运车进行左转向时相比于右转向时更容易发生侧翻情况, 因此其坡面行驶转向并考虑船横摇情况进行侧翻受力分析,受力分析图见图5。
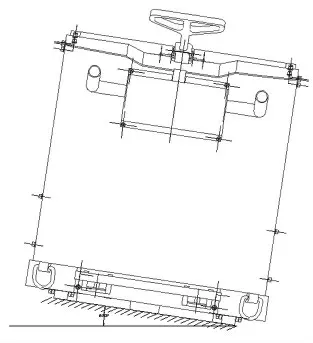
图5 空载时横摇下坡面左转向受力分析图
通过受力分析图分析得, 右转向发生侧翻的临界状态为内侧支撑轮提供的支撑力为0,即F1=0,经计算:
离心力:F离=G·a

根据力矩平衡:G·cosα·g·(L2-H·tanα)=F离·H/cosα(对外侧支撑轮(右前轮)着地中心点计算力矩)
经 计 算 得:n=4.77>1,因此助力液压搬运车满载状态下在坡面行驶转向并考虑船横摇情况下不会发生侧翻,满足使用要求。
4 试验验证
为了验证设计的可行性和可靠性,在载重1T 集装箱状态下,验证助力液压搬运车在满载状态下的下坡试验,从试验情况看,试验状况良好, 助力液压搬运车能够满足在极限状态下船舶航行时满载的运行、堆码和载重。并对各个防爆分系统进行防爆性能检测,防爆技术要求符合2 区防爆等级要求。
5 结束语
助力液压搬运车能够在小空间内使用,且具备防爆、转运和堆码等功能, 能够解决现有船舶内因空间受限导致无法进行小型物资的转运和堆码,且能够原地旋转,改善了防爆环境下小空间范围内物资的转运和堆码问题。
