基于神经网络的磁流变减振器模型参数辨识*
2022-09-22张宇涵陈双任洪卓
张宇涵 陈双 任洪卓
(辽宁工业大学,锦州 121000)
主题词:磁流变减振器 BP神经网络 正向模型 逆向模型
1 前言
磁流变减振器通过调节其内部线圈的电流来改变内部磁场强度,在毫秒级的时间内其内部的磁流变液体可以在外加磁场的作用下改变流动特性,产生剪切屈服应力,进而输出连续可调阻尼力。其工作特性具有很强的不确定性,导致输出的阻尼力具有非线性和滞回特性,因而对其建立准确的动力学模型难度较大。
目前,磁流变减振器模型主要分为参数化模型和非参数化模型2种。参数化模型主要包括Bingham模型、Bouc-Wen模型、非线性滞回双黏性模型和Sigmoid模型等。其中Bingham模型对磁流变减振器特有的滞回特性的描述并不准确,且模型精度差;Bouc-Wen模型在建模过程中需要计算的参数数量偏多,而且难以确定,也会对模型的精度产生影响。相比于参数化建模,非参数化建模没有直接的函数表达式,通常根据试验数据通过曲线拟合或者经过训练的神经网络来建立其相应的力学模型。
神经网络能够精确地拟合非线性函数,只要选取的样本数据足够丰富,就可以很好地确保训练精度,从而实现模型的高精度拟合。鞠小龙通过对自主设计的直线式微型磁流变减振器进行BP 神经网络建模,证明了BP神经网络能够很好地模拟摩擦型磁流变减振器的动力学特性。基于前人的经验,本文针对单筒单出杆式磁流变减振器进行性能特性测试,将不同工况下的试验数据通过BP 神经网络进行训练学习,建立单筒单出杆式磁流变减振器的正向模型和逆向模型,并将模型的仿真输出与磁流变减振器的实际输出进行对比,以验证模型的辨识能力。
2 磁流变减振器的性能试验
本文选取LORD 公司的RD-8041-1 型磁流变减振器,其物理样机如图1 所示。该减振器为单筒单出杆式,由缸体、活塞杆、线圈、密封圈和氮气蓄能器组成,其允许的最大电流为1.0 A。电磁线圈缠绕在活塞头上,导线从活塞杆中牵出至磁流变减振器外部与电源相连,磁极随着活塞的往复运动在缸筒中上下运动,磁流变液在阀式节流孔中流动,受到磁场的作用,液体黏度发生大幅变化,抗剪切力迅速变化从而对外输出可变阻尼力。氮气蓄能器作为气体补偿装置可以补偿活塞杆进出缸筒时引起的缸筒总容积的变化。
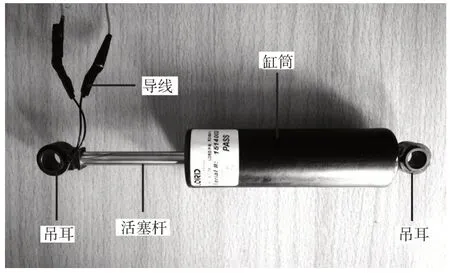
图1 RD-8040-1型磁流变减振器物理样机
试验采用MTS 849 减振器试验台,如图2 所示,磁流变减振器的激励电源采用学生电源。减振器活塞杆、缸筒分别利用固定夹具与试验台上部和下部的液压作动筒连接,连接处均放置自制的吊耳环,以保证试验过程中磁流变减振器与试验台固定连接,从而避免多余振动影响试验结果的准确性。

图2 磁流变减振器性能试验台
试验工况包括不同的激振频率、振动位移和控制电流:活塞杆的振动位移分别为±5 mm、±10 mm、±15 mm、±20 mm、±25 mm、±30 mm;激振频率分别为1 Hz、2 Hz、3 Hz、4 Hz、5 Hz;向线圈施加的控制电流分别为0 A、0.1 A、0.2 A、0.3 A、0.4 A、0.5 A、0.6 A、0.7 A、0.8 A、0.9 A。选取部分工况下的磁流变减振器阻尼力与速度、阻尼力与位移关系曲线如图3所示。从图3中可以看出,单筒单出杆式磁流变减振器的阻尼力随着电流和频率的增大而增大,阻尼力与位移的曲线近似为封闭的矩形,最大阻尼力在位移变化的过程中没有明显变化,其力学特性表现出良好的非线性和滞回特性。
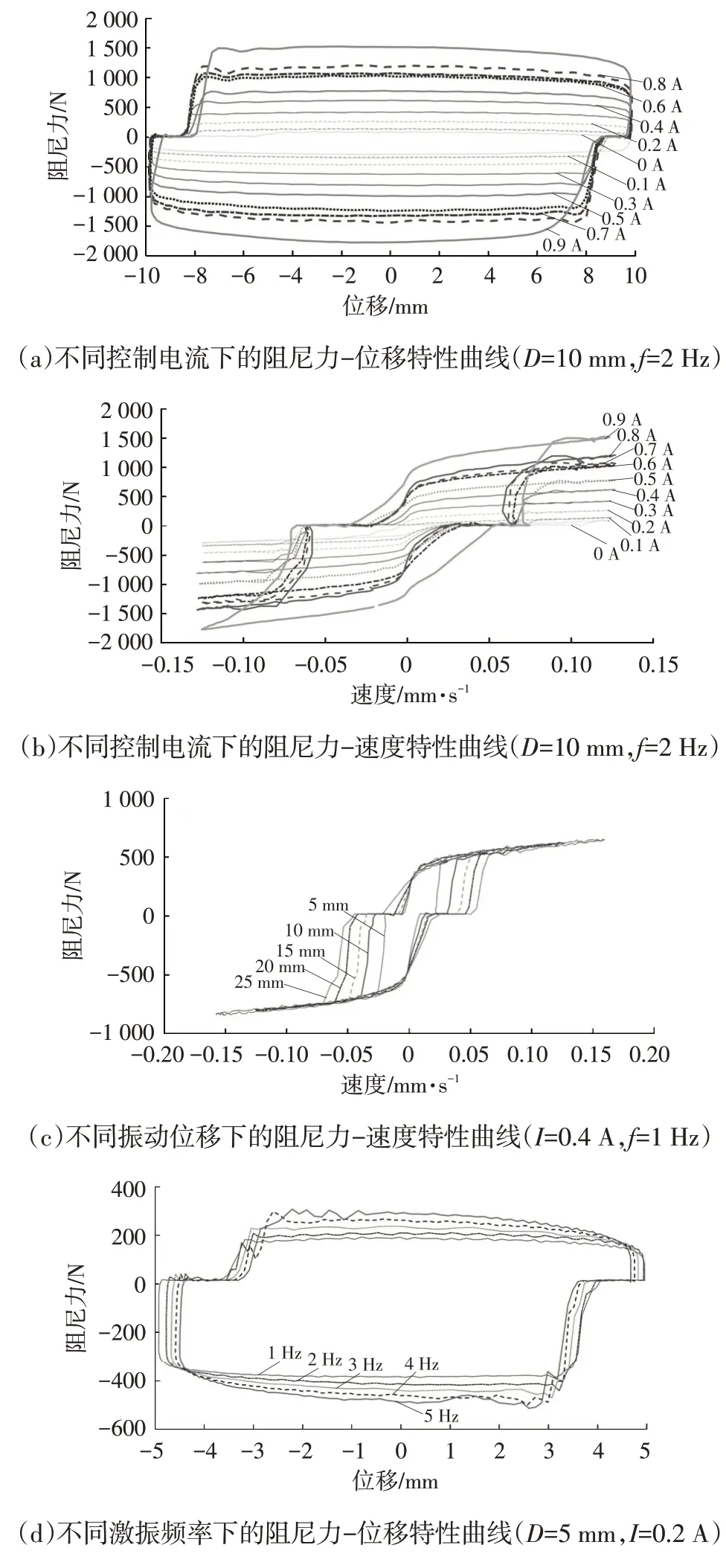
图3 磁流变减振器力学特性试验曲线
3 磁流变减振器的模型辨识
3.1 BP神经网络建模
BP神经网络由输入层、隐层和输出层组成,它无须事先获取函数方程的输入与输出的映射关系,只需反复迭代和学习,即可最终使神经网络训练后的输出值与实际输出的误差最小。
BP神经网络在网络初始化后通过初始给定的权值和阈值计算隐层和输出层的神经元输出,然后对比网络输出与实际输出的误差,如果没有达到期望值,则将此误差反向传递给隐层和输出层,通过网络的自学习能力来修正权值和阈值,之后再次计算输出,最终得到使网络输出与实际输出的误差平方和最小时对应的权值和阈值,然后结束训练。此时即可得到一个可以处理类似样本信息的神经网络模型。
3.2 磁流变减振器正向模型
磁流变减振器输出的阻尼力与活塞运动的速度、位移和线圈的控制电流成函数关系,其正向模型采用单隐层BP 神经网络。其中输入层的7 个信号分别为:当前时刻活塞的速度v、位移D、减振器线圈电流I和前一时刻活塞的速度v、位移D、减振器线圈电流I、减振器输出的阻尼力F,输出层信号为当前时刻减振器输出的阻尼力F。隐层神经元数量由经验公式确定:

式中,、分别为输入层和输出层神经元数量;为1~10之间的常数。
通过人工试错,得到训练效果最佳的隐层神经元数量为7个。这样得到一个7×7×1的BP神经网络,结构如图4所示,训练方法如图5所示。
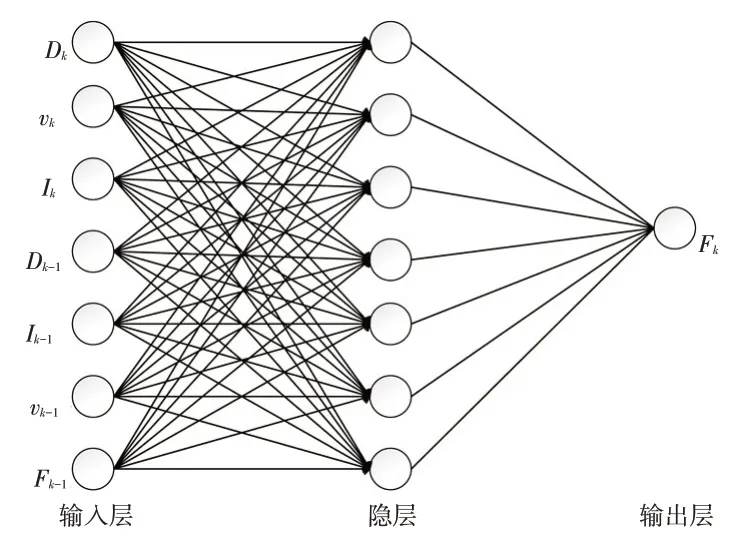
图4 BP神经网络正向模型结构
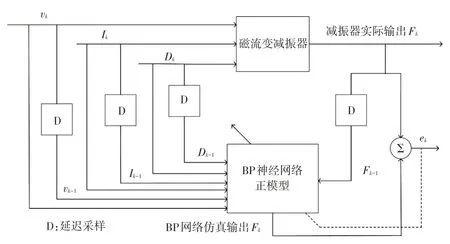
图5 BP神经网络正向模型训练方法
为了避免样本数据数量级相差过大,需将数据进行归一化处理,建立好BP 神经网络后再进行数据反归一化处理,然后经输入层开始网络训练。本文采用minmax标准化的方法,对样本数据进行线性变换:

式中,为标准化后的数据;x为标准化前的数据;、分别为样本数据的最大值和最小值。
隐层传递函数选取S 型的正切函数tansig,其表达式为:

其导数为:

将导数运算转换成乘法运算能够大幅缩短运算时间,同时提升运算精度。输出层传递函数选取纯线性函数purelin,两者共同作用可以很好地模拟非线性函数关系。性能函数选用均方误差损失函数:


通过计算预测值与实际值的误差,即可利用梯度下降对网络进行训练。
权值和阈值的BP 学习算法采用梯度下降动量学习函数learndm。训练算法采用Levenberg-Marquardt(L-M)算法,其兼顾了梯度下降算法的初始阶段优化和牛顿算法的快速收敛特性,减少了网络的迭代次数,使网络收敛迅速,精度提升。
正向模型网络训练集的样本来自特性试验中各种工况下的减振器性能试验数据,每种工况试验数据共2 000 组,随机选取1 600 组数据用于训练,其他400 组试验数据用于测试。通过BP 神经网络的训练,正模型误差仅为0.89%,说明正向神经网络的模型辨识度较高。试验台频率的提高和减振器输入电流的增大使得磁流变减振器阻尼力增大,进而导致磁流变减振器产生振动,对试验结果造成一定的影响。
测试集在几种工况下的训练结果如图6所示,从图6中可以看出,正向模型仿真输出的阻尼力与试验数据曲线的拟合度很高,虽然受试验台振动影响,当产生大阻尼力时某几个点预测阻尼的误差较大,但整体结果表明,BP网络成功训练了样本数据,经过训练的正向神经网络模型可以很好地模拟磁流变减振器输出的阻尼力。
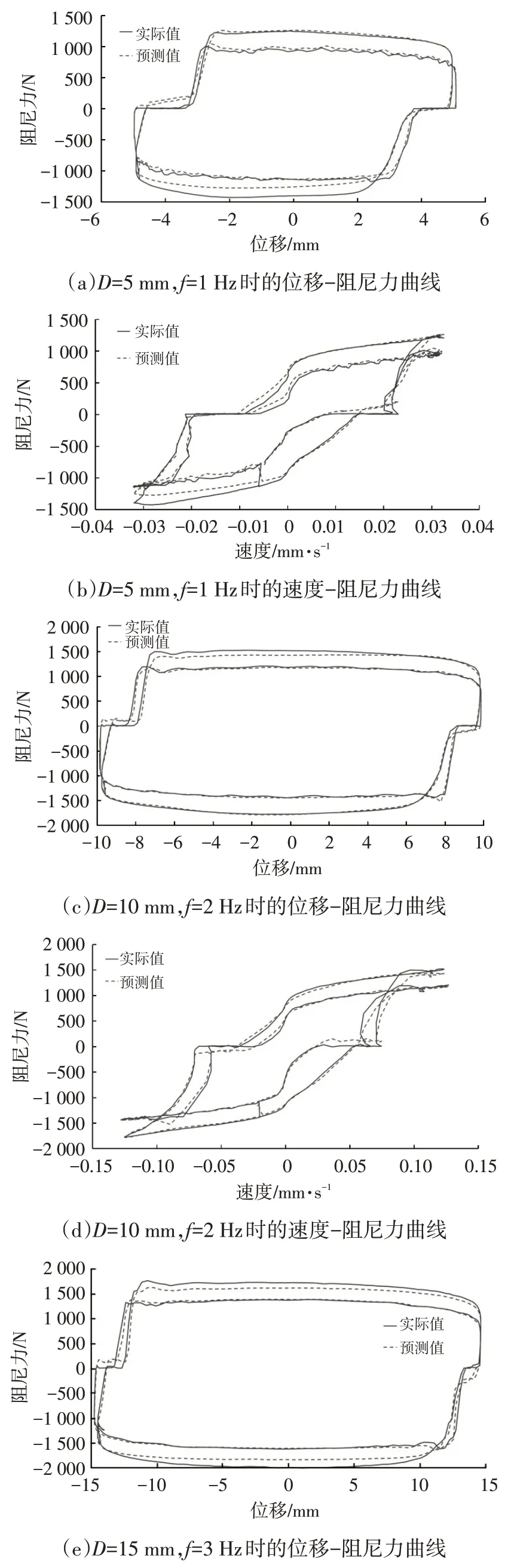
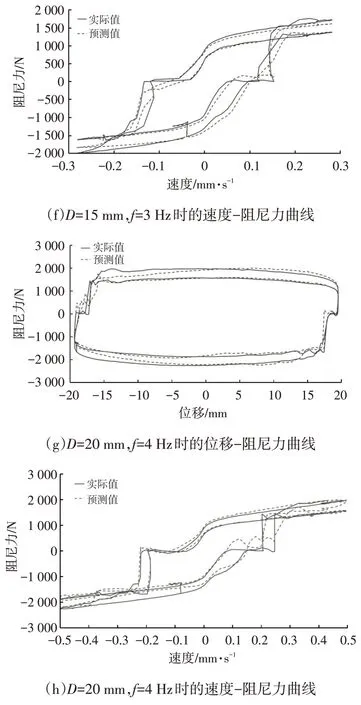
图6 减振器正向模型测试集仿真结果
3.3 磁流变减振器逆向模型
磁流变减振器应用于半主动悬架模型控制中,作为执行机构,为了有效减振,通常需要一个期望阻尼力,由于减振器输出的阻尼力是位移、速度和控制电流的函数,所以必须先计算出减振器的控制电流。因此需要建立磁流变减振器的逆向模型,从而达到预测控制电流的目的。
同样采用单隐层BP神经网络来搭建磁流变减振器的逆向模型。其输入层的7个信号分别为:F、D、v、D、v、F和I;输出层信号为I。隐层的神经元数量同样由式(1)确定,采用人工试错法确定最优的隐层神经元数量为14个。逆向模型网络的函数均采用与正向模型相同的函数,这样得到一个7×14×1 的BP 神经网络,结构如图7所示,训练方法如图8所示。逆向模型采用的传递函数、性能函数、学习算法和训练算法均与正向模型一致。
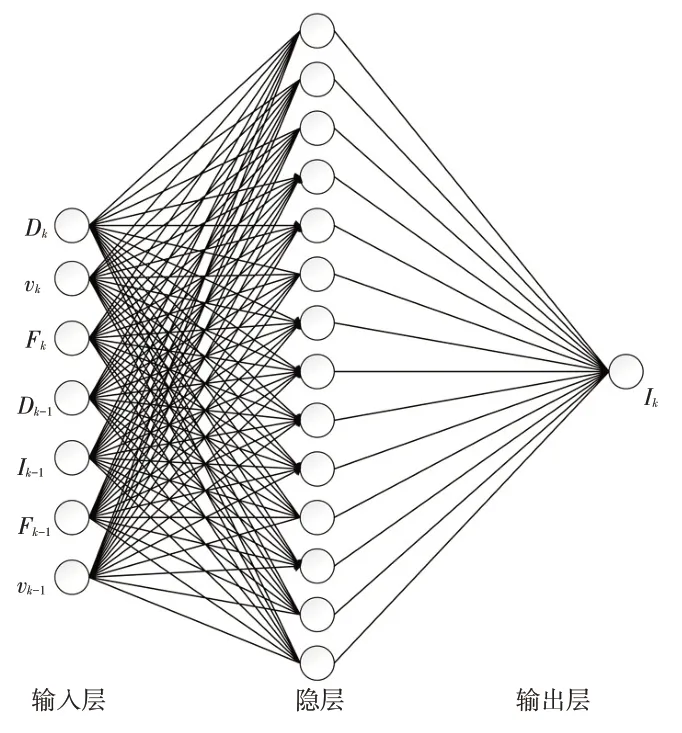
图7 BP神经网络逆向模型结构
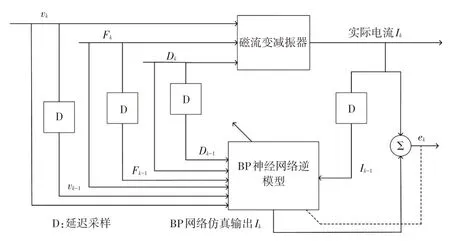
图8 BP神经网络逆向模型训练方法
逆向模型的神经网络训练与正向模型类似,样本来自特性试验中各种工况下的减振器性能试验数据,每种工况试验数据共2 000组,随机选取1 600组数据用于训练,其他400 组试验数据用于测试。通过BP 神经网络训练,逆向模型的误差仅为0.52%,说明逆向神经网络的模型辨识度较高。本文测试集分为2类测试工况:定频率和定位移;变频率和变位移。选取典型测试结果如图9所示,从图9中可以看出,当输出的电流很大时,有某几个点的预测电流误差较大,但逆向模型仿真输出的电流与试验数据曲线的拟合度整体很高,进而说明经过训练的逆向神经网络模型可以很好地模拟磁流变减振器的控制电流。
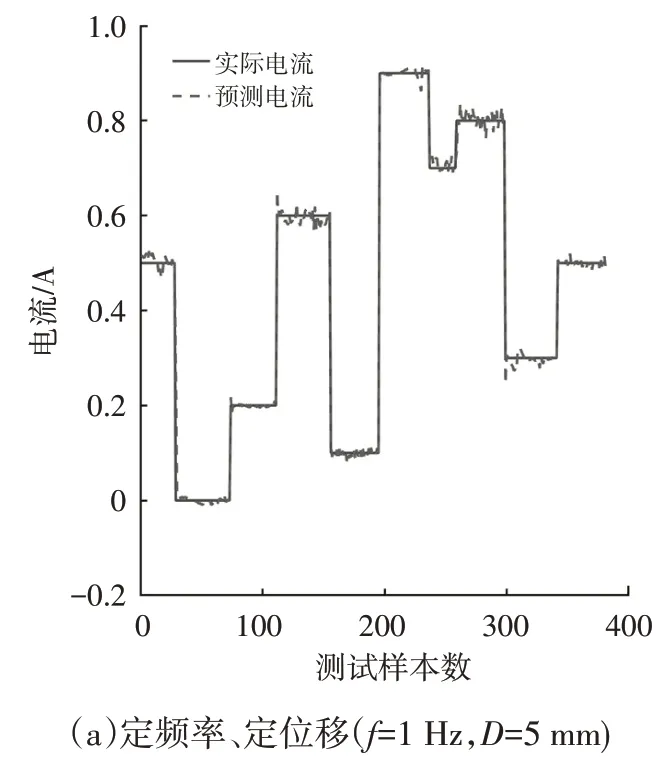
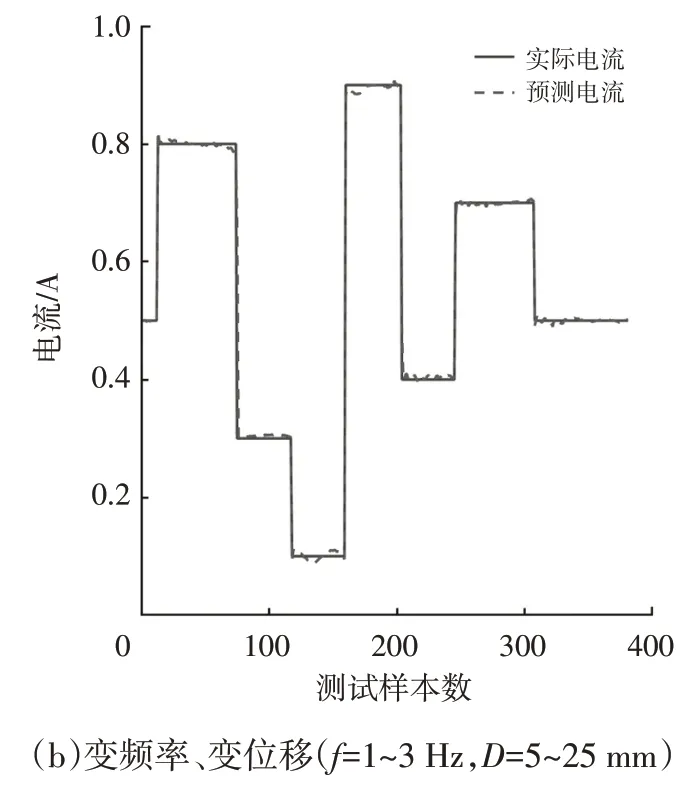
图9 减振器逆向模型测试集仿真结果
4 结束语
本文基于磁流变减振器力学特性台架试验数据,利用具有7个神经元输入层的单隐层BP神经网络方法建立了磁流变减振器的正向模型和逆向模型,实现了减振器的非参数化建模,研究结论如下:
a.基于单隐层BP神经网络建立的磁流变减振器正、逆模型可以精确地预测减振器的阻尼力和控制电流;
b.本文采用了7 个神经元输入层,由于输入量的增多,对数据的需求也较多,所以7 个神经元输入对磁流变减振器参数的精准预测更加精准。
本文只采用了BP 神经网络自带的训练算法,如果通过智能优化算法进一步进行优化,得到的结果会更为准确。
