面向电动两轮车的汽车AEB系统研究*
2022-09-22钱宇彬张进杰常飞李威
钱宇彬 张进杰 常飞, 李威
(1.上海工程技术大学,上海 201600;2.司法鉴定科学研究院,上海 200063)
主题词:AEB系统 事故避免率 汽车-电动两轮车碰撞事故
1 前言
电动两轮车骑车人作为弱势道路使用者,在汽车安全领域被视为重点保护对象。中国新车评价规程(China-New Car Assessment Programme,C-NCAP)等车辆安全评价规则都已将汽车主动安全纳入评分体系,车辆对弱势道路使用者的保护方面的测试标准也在逐步完善。
自动紧急制动(Autonomous Emergency Braking,AEB)系统是高级驾驶辅助系统(Advanced Driver Assis⁃tance Systems,ADAS)的重要组成部分,国内外许多学者对其开展了大量的研究。日本学者根据其国内交通数据,为主动避撞系统定义评价指标,对有避撞功能的AEB 系统进行了深入研究。国内对AEB 系统的研究起步较晚。江丽君等人对行车记录仪视频进行归纳分析,建立了符合我国实际交通情况的AEB 测试场景;刘颖等以人车事故样本为基础,用聚类分析的方法,归纳出5 类AEB 系统行人危险测试场景。C-NCAP 自2018 年起将AEB 系统纳入评分标准,但仅限于车对车以及车对行人的AEB 系统,直到2020 年才将汽车对两轮车的AEB系统测试标准纳入体系。
综上,目前针对涉及电动两轮车的AEB 测试场景和控制策略的研究较少,本文依据国家车辆事故深度调查体系(National Automobile Accident In-Depth Investi⁃gation System,NAIS)松江站点真实交通事故数据,分析汽车与电动两轮车碰撞事故特征,结合汽车事件数据记录系统(Event Data Recorder,EDR)中的数据和视频信息,应用PC-Crash 进行事故重建,建立碰撞测试数据库,并确定AEB系统的关键参数,根据前方电动两轮车运动状态建立安全距离模型,以此为基础设计AEB 系统控制策略。
2 汽车-电动两轮车事故特征分析
本文所选取的86 起事故数据均来自NAIS 松江站点近6年的事故数据,案例信息主要包括事故现场车辆信息、道路信息以及骑车人伤亡信息等。
2.1 相对碰撞位置特征
通过对所筛选的86 起事故案例进行特征分析,在两车的碰撞事故中,按汽车车身碰撞区域划分,电动两轮车与汽车前部碰撞的案例有51起(占比59.3%),与汽车右侧碰撞的案例有21起(占比24.4%),与汽车左侧碰撞的案例有14起(占比16.3%)。
2.2 碰撞时速度分布特征
研究表明,在涉及电动两轮车的交通事故中,骑车人头部的损伤程度与碰撞时汽车的速度密切相关;据分析,当碰撞车速达到50 km/h时,骑车人的头部损伤简明定级标准(Abbreviated Injury Scale,AIS)将达到3。分析所选取的事故案例样本信息,得到两车碰撞时的速度分布特征,如图1和图2所示。
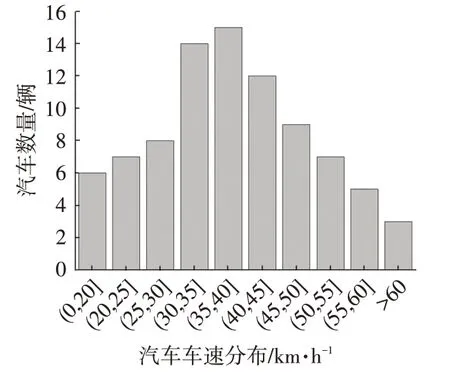
图1 汽车车速分布
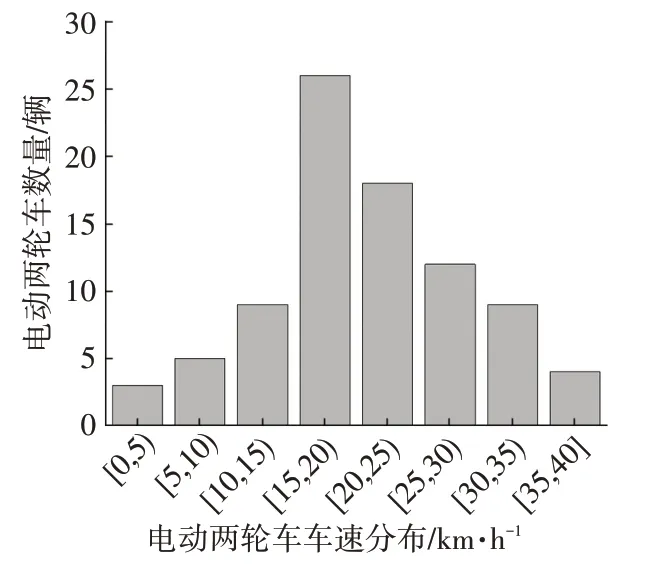
图2 电动两轮车车速分布
由图1 和图2 可得:在所筛选的事故案例中,碰撞事故发生时,汽车的速度主要集中在30~45 km/h,电动两轮车的速度主要集中在15~25 km/h,这也与松江地区的道路工况基本吻合。值得关注的是,个别案例中电动两轮车的速度接近40 km/h,存在极大的安全隐患。
3 仿真工况及参数设置
以前方电动两轮车运动状态为基础,并参考2020年版C-NCAP 中关于AEB 系统性能测试场景的要求,本文将AEB 系统-电动两轮车的测试场景分为4 种,即接近前方静止车辆、匀速车辆、制动车辆和横穿车辆。具体仿真工况如表1所示,其中“本车”和“目标车”分别指汽车和电动两轮车。
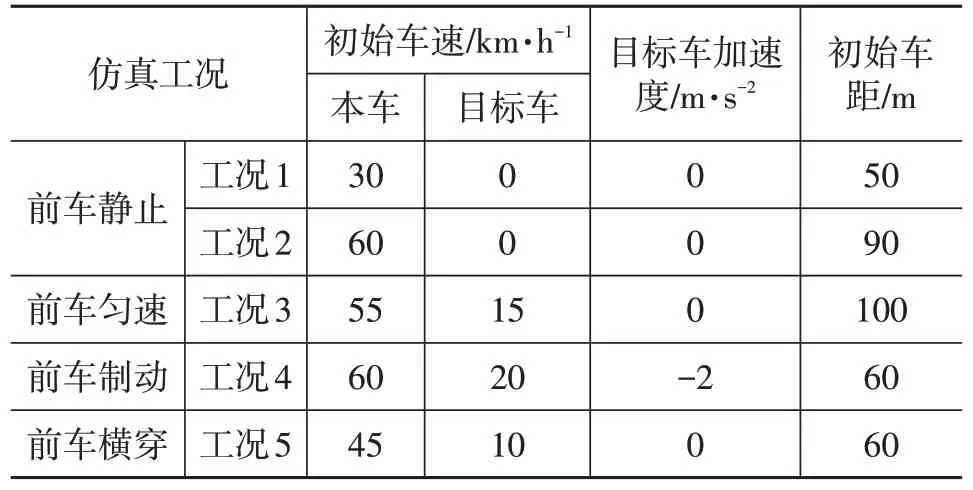
表1 仿真工况
3.1 场景设置
在PreScan 软件中,运用图形用户界面(Graphical User Interface,GUI)模块中的场景搭建功能对汽车与电动两轮车典型事故场景进行搭建。首先根据本地区交通路况,建立一条符合标准的结构化道路,道路长度为400 m,双向两车道。此外,路面附着系数设置为0.8,天气和光照条件默认为良好。
仿真车型选择较为常见的奥迪,将CarSim 中建好的车辆动力学模型导入PreScan,选择软件自带的两轮车模型,结合相关标准以及实际情况进行相关参数的设置。
3.2 传感器设置
通过对碰撞事故发生前死亡、重伤以及轻伤事故案例中电动两轮车被探测到的概率确定最佳的探测距离和探测角度,传感器参数设置如图3 所示,选取120°为最佳探测角,45 m为最佳探测距离,且选取毫米波雷达作为车辆传感器(也有车辆中的传感器是毫米波雷达和摄像头的组合),基本符合实际车辆中AEB系统的需求。
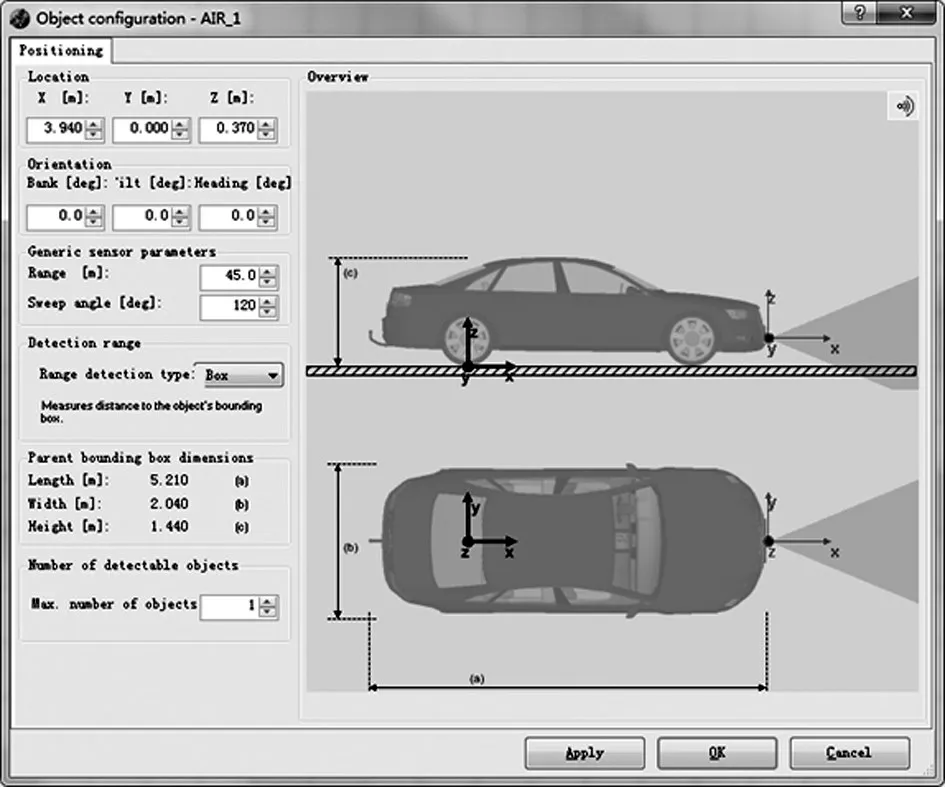
图3 传感器参数设置
目前,AEB系统危险状态的判定方法主要包括时间判断方法和距离判断方法。本文选用的是距离判断方法,设定危险系数为:

式中,为本车与目标车的相对距离;为全力制动安全距离;为部分制动安全距离。
当>1时,即>时,车辆处于安全状态;当0<<1时,即>>时,本车与目标车有碰撞的可能性,若驾驶员未采取制动措施,则AEB 系统会启动部分制动功能;当<0 时,即>时,本车状态很危险,需要紧急全力制动快速介入,才能降低或避免碰撞事故的发生。
本文根据目标车运动状态建立全力制动和部分制动安全距离模型,采用分级制动策略,当0<<1 时,控制策略输出-4 m/s的部分制动加速度,当<0 时,输出-8 m/s的全力制动加速度,最后利用模糊PID 控制策略对AEB 系统进行分层控制,实现对车辆期望加速度的精准跟随。
4 仿真结果与分析
4.1 接近前方静止车辆
工况1:本车从原点出发,仿真时长为15 s,仿真结果如图4所示。
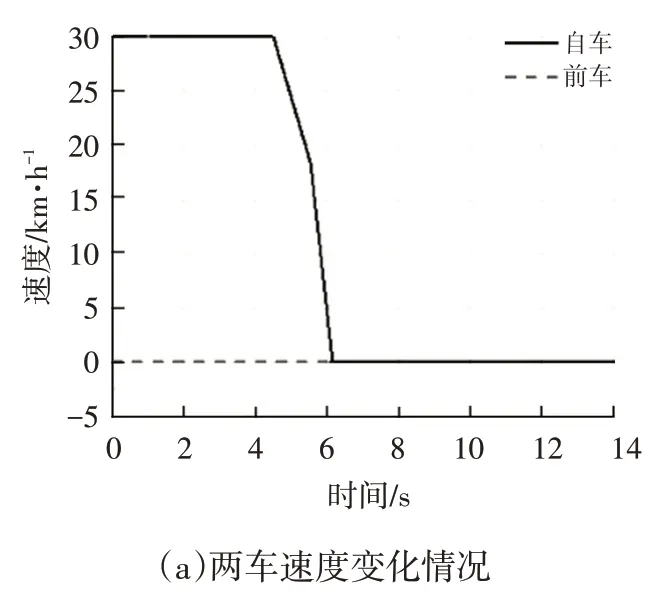
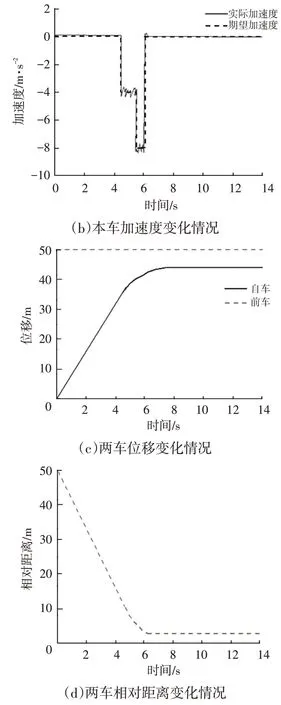
图4 工况1仿真结果
由图4可知:在第4.4 s时,本车AEB系统检测到有碰撞风险,向车辆输入-4 m/s的部分制动加速度,此时本车速度下降;在第5.5 s时,随着两车实时距离减小,碰撞风险等级提升,AEB系统向车辆输入-8 m/s的全力制动加速度;继续行驶0.6 s后,车辆停止,两车最终相对距离为3.01 m。
工况2:本车从原点出发,仿真时长为15 s,仿真结果如图5所示。
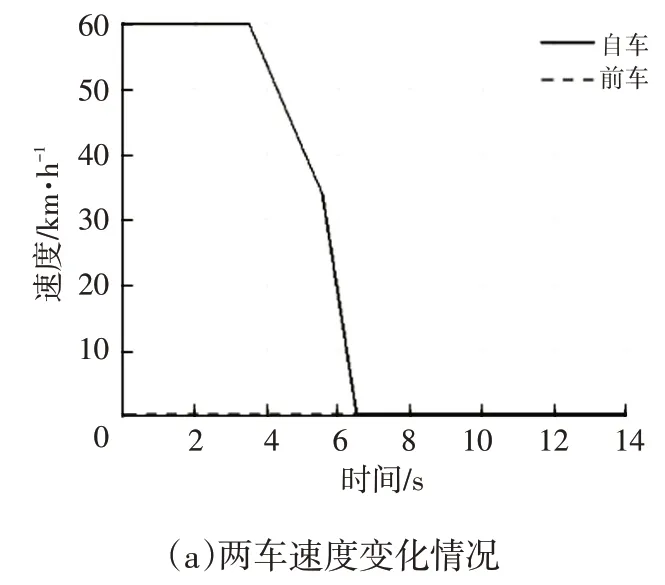
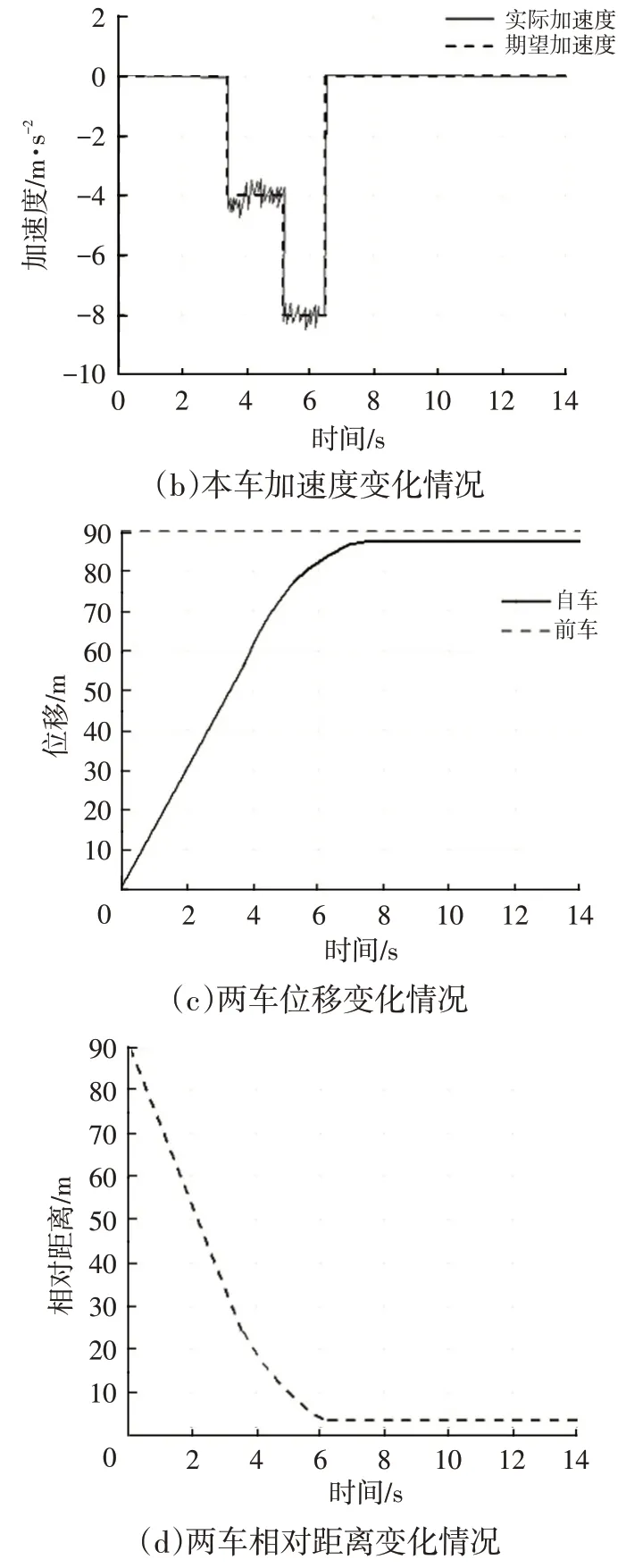
图5 工况2仿真结果
由图5 可知:在第3.5 s 时,本车的AEB 系统检测到有碰撞风险,向车辆输入-4 m/s的部分制动加速度,此时本车速度减小;在第5.31 s 时,碰撞风险等级提升,AEB系统向车辆输入-8 m/s的全力制动加速度;继续行驶1.18 s后,车辆停止,两车最终相对距离为2.55 m。
4.2 接近前方匀速车辆
工况3:本车从原点出发,仿真时长为15 s,仿真结果如图6所示。
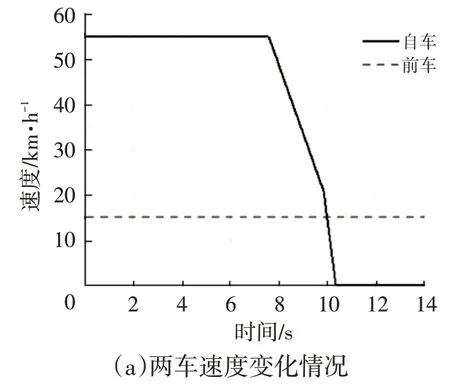
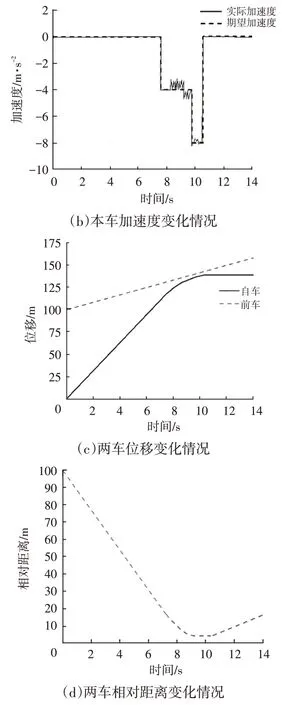
图6 工况3仿真结果
由图6 可知:在第7.6 s 时,本车的AEB 系统检测到有碰撞风险,向车辆输入-4 m/s的部分制动加速度,此时本车速度减小,碰撞风险等级提升;在第9.91 s 时,AEB系统向车辆输入-8 m/s的全力制动加速度;行驶至第10.6 s时,本车最终停止,此时两车间距离为2.17 m。
4.3 接近前方制动车辆
工况4:本车从原点出发,仿真时长为15 s,仿真结果如图7所示。
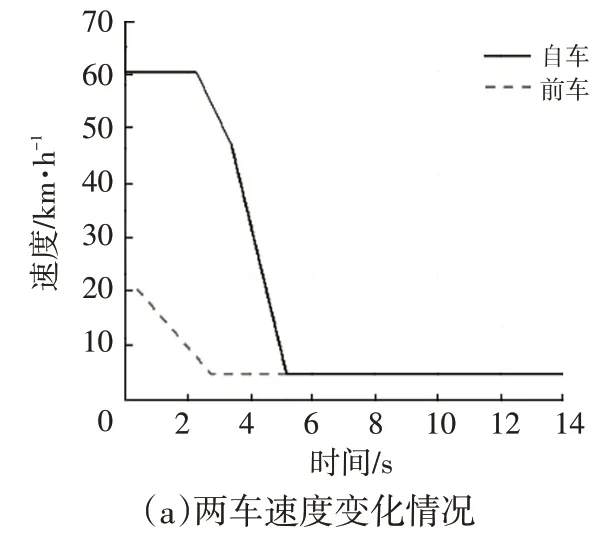
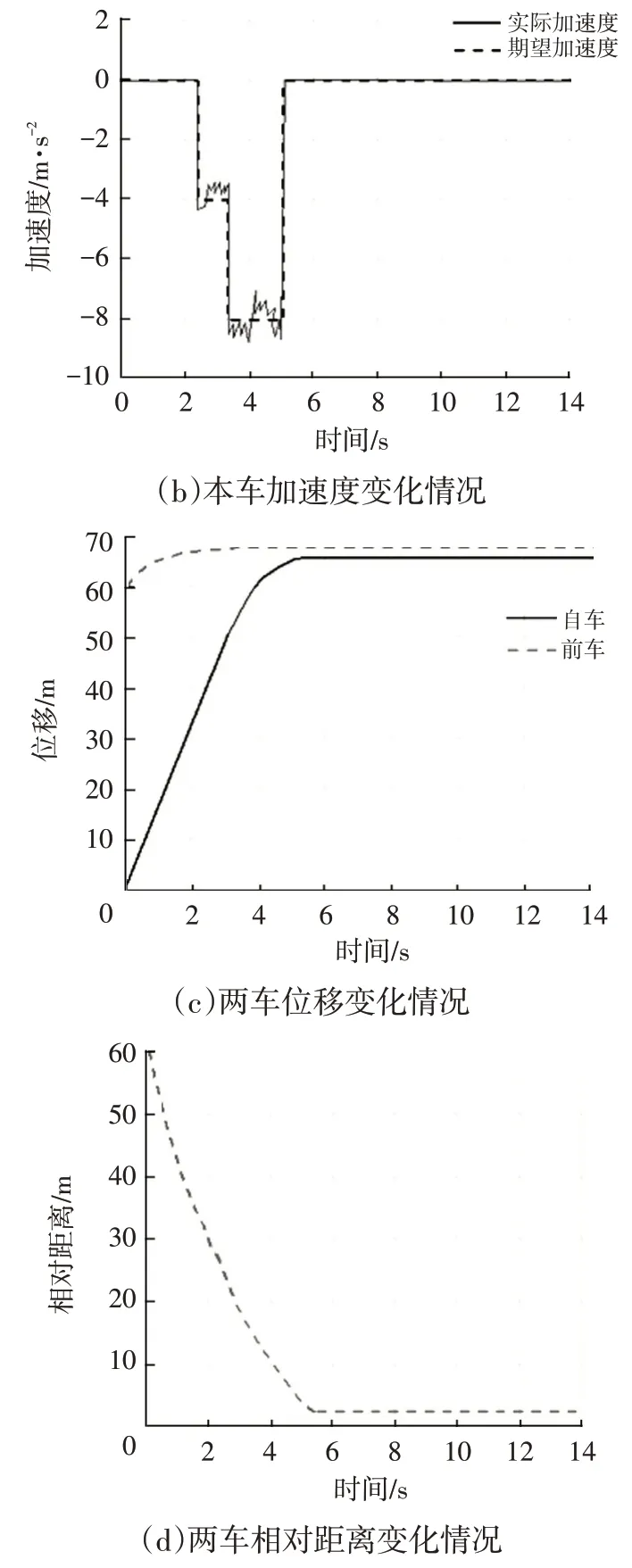
图7 工况4仿真结果
由图7可知:在第2.49 s时,AEB系统检测到有碰撞风险,向车辆输入-4 m/s的部分制动加速度;在第2.78 s时,碰撞风险等级提升,电动两轮车停止运动而自车继续减速行驶;在第3.5 s 时,碰撞危险等级进一步提升,AEB系统向车辆输入-8 m/s的全力制动加速度,车辆快速制动;继续行驶1.58 s后,本车停止运动,两车速度均为零,最终相距1.45 m。
4.4 接近前方横穿车辆
工况5:本车从原点出发,仿真时长为10 s,仿真结果如图8所示。
由图8可知:在第3.29 s时,AEB系统检测到前方有碰撞风险,向车辆输入-4 m/s的部分制动加速度;随着本车继续向前行驶,两车的纵向距离缩短,碰撞风险等级提升,在第4.82 s 时,AEB 系统向车辆输入-8 m/s的全力制动加速度;继续行驶0.8 s 后,本车停止运动,两车最终的纵向相对距离为1.8 m。
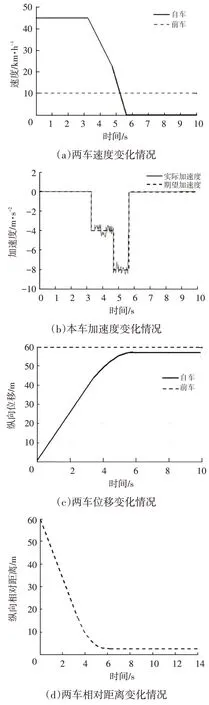
图8 工况5仿真结果
4.5 仿真结果分析
综合前文的仿真方法,对碰撞测试数据库中86 起事故案例进行仿真,实际数据与仿真结果的对比如表2所示。其中:为汽车初始速度;为电动两轮车初始速度;为事故的实际碰撞速度;为AEB系统介入后的碰撞速度仿真结果;为两车停止时的最终距离仿真结果。
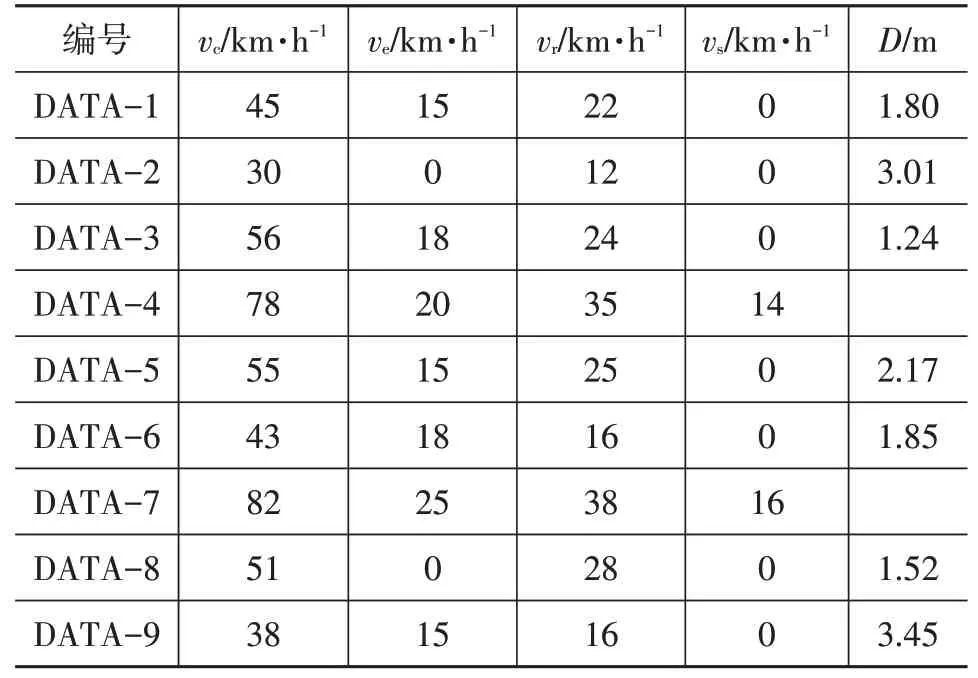
表2 实际数据与仿真结果对比
对各种工况的仿真结果进行统计分析,结果如表3所示,由表3可知,在车辆配备AEB系统条件下,85%以上的碰撞事故可以避免。

表3 典型工况下AEB系统事故避免率仿真结果 %
此外,当车辆速度过大时,碰撞事故无法避免,但碰撞时的车辆速度会降低。通过将仿真结果与实际数据进行比较,配备AEB 系统后,汽车的平均碰撞速度由29.3 km/h 下降到13.2 km/h,速度降低了51.5%,提高了对骑车人的安全保护水平。有、无AEB 系统条件下汽车碰撞速度累积分布如图9 所示,由图9 可以看出,在配备AEB 系统的条件下,超过80%的事故中汽车的碰撞速度不会超过21 km/h,验证了AEB 系统的有效性。
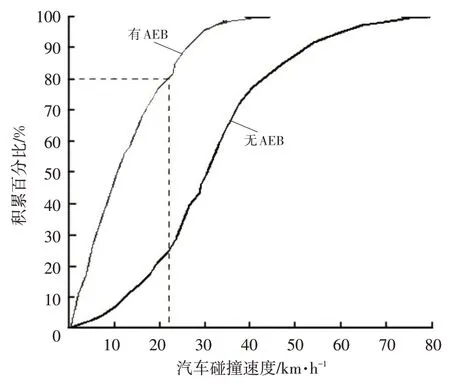
图9 汽车碰撞速度累积分布
5 结束语
本文参照C-NCAP 中AEB 系统两轮车测试场景,确定仿真工况,分别对5 种工况案例进行仿真,得出以下结论:
a.在车辆配备AEB系统的条件下,事故避免率达到了85%以上。
b.在碰撞无法避免的事故中,汽车的平均碰撞速度由29.3 km/h下降到13.2 km/h,降低了51.5%。
本文在确定电动两轮车的运动状态中,只分析了两车同向行驶以及电动两轮车横穿车辆行驶路径这2 种类型的工况,其他复杂的工况如转弯、倒车等,还需要进一步研究。
