新能源汽车制动系统解析(三)
2022-09-09江苏高惠民
◆文/江苏 高惠民
(接上期)
二、集成动力制动模块化与自动驾驶
随着车辆行驶稳定程序系统(ESP)和安全带、安全气囊等被动安全系统的引入,驾驶安全性得到了提高,道路交通死亡和严重伤害的情况在过去几十年中不断减少。但由于人们对个人移动性的需求快速增加,这导致更高的交通密度,交通复杂性和对驾驶员的压力越来越大。统计数据显示,驾驶员仍然是事故的重要来源。为了进一步提高驾驶安全性,并将驾驶员从车辆引导的复杂任务中解放出来,几乎所有的汽车制造商和零件供应商都全力投入到自动驾驶(HAD)汽车的研发中。这些自动驾驶新技术与减少CO和提高能源效率的电气化相同,将在未来几年内推向市场。至少在几个特定环境的用例中,车辆应该能够在没有人类驾驶员帮助或指导的情况下提供驾驶能力。
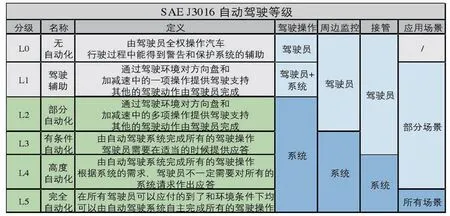
根据车辆具备的自动驾驶程度,美国汽车工程师协会(Society of Automotive Engineers,SAE)将其划分为L0-L5的自动驾驶等级。如图20所示。若用“眼、手、脚”三个方面来判断车辆的自动驾驶程度,L0阶段则需要驾驶员的“眼、手、脚”全部参与来操作汽车。随着自动驾驶程度的提高,自动驾驶系统逐渐提供更多的驾驶辅助功能,进而能实现“脱脚”,“脱手”再到“脱眼”功能。
自动驾驶汽车技术架构如图21所示。在自动驾驶的子系统功能中,车辆制动系统担任了重要的角色。尤其是新型制动系统需要为自动驾驶提供主动制动、能量回收和车辆稳定性控制等功能,同时在L3级别以上的自动驾驶中,还对制动系统冗余备份功能提出了需求。

1.制动系统架构新技术
通过动力传动系统的电气化和对优化能源效率的需求,新的制动系统已被引入市场。除了传统的真空伺服制动系统外,还有新的节能制动系统,如机电伺服制动助力器(例如iBooster)。值得一提的是,第一代iBooster能与ESP+主动蓄能器(Smart Actuator)组成3-Box方案,而第二代iBooster能与ESP配合组成2-Box方案,这两种制动系统方案能实现车辆的主动制动、能量回收及车辆纵、横向稳定性控制等功能,但是也存在着结构不够紧凑,单个部件不能实现制动压力解耦等缺点。2017年,博世又推出了基于1-Box构型的集成式动力制动系统(Integrated Power Brake,IPB),如图22所示。该集成式动力制动系统把制动助力器、踏板感觉模拟器以及液压调节单元都集成在一个单元中,能实现基础制动助力、制动踏板力与制动液压解耦和轮缸制动压力单独控制等功能。与博世IPB相似的制动系统还有大陆集团推出高度集成化的电控助力制动系统MK C1,图23是MK C1在奥迪e-tron EV上应用的结构原理图。该套系统将电机、踏板感觉模拟器、双腔制动主缸、电磁阀组成的液压调节单元等装置集成在一起,比传统的制动系统更加轻便,重量减轻30%。该系统建压时间约为150ms,建压时间缩短一倍以上,配备AEB功能的汽车有更加充足的时间对障碍物进行检测和确认。由于制动踏板和主缸没有直接连接,为全解耦结构,可以实现100%的能量回收,应用在电动汽车上可以回收更多的电能来增加续航里程。将MK C1及MK 100相结合可以实现制动冗余功能。在正常情况下,常规制动等功能由MK C1实现,制动液压力由MK 100液压制动扩展系统传递,MK 100系统具有自检性,保证系统完全可用。当主制动系统发生故障但阀体保持良好时,MK 100 HBE单元进入协同制动模式,制动液被压入MK C1的电磁阀中,使得后轮产生制动力,这种功能保证了全自动驾驶制动系统的安全性。

2.集成式动力制动模块(IPB)工作原理
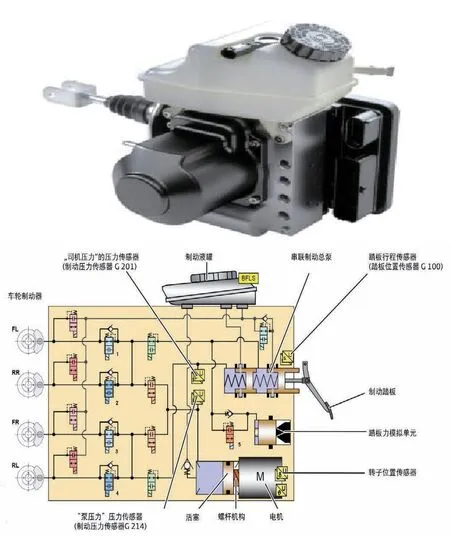
如图24所示,集成式动力制动模块结构由储液壶、双腔制动主缸、伺服缸、制动踏板、踏板感觉模拟器、永磁同步电机、隔离阀以及四组进、出液阀组成。在正常制动助力模式时:驾驶员踩下制动踏板,位移传感器采集踏板位移信号,电控单元发出控制指令,隔离阀1、2、3、4、5均上电工作,此时隔离阀1、4关闭,隔离阀2、3、5打开,制动液流经隔离阀5进入踏板感觉模拟器中,给予驾驶员合适的制动踏板脚感。然后电机开始转动,经过减速增扭机构推动伺服缸活塞建压,制动液分别从隔离阀2、3流入四个轮缸中建立轮缸制动压力。在正常制动助力模式下,隔离阀1、4上电关闭,阻断了主缸和轮缸之间的液压通路,同时利用被动式踏板感觉模拟器给驾驶员适宜的制动脚感,通过建立伺服缸压力来完成轮缸建压,这就达到了制动踏板力和轮缸制动压力解耦的效果。同样地,该构型方案也具备失效备份模式,当电控制动系统失效时,所有电磁阀均不通电,此时驾驶员踩下制动踏板,主缸中的制动液流经隔离阀1、4进入四个制动轮缸中,靠人力在轮缸建立制动压力,保证车辆具有一定的制动减速度。根据法规ECE R13-H要求,系统应产生不小于2.44m/s的制动减速度。

集成式动力制动模块的液压驱动单元中,使用高性能的永磁同步电机经过减速传动机构将电机旋转力矩转化为输出推杆柱塞的水平推力。减速传动机构采用了行星齿轮和丝杠螺母传动,传动结构示意图和行星齿轮实物图如图25所示。
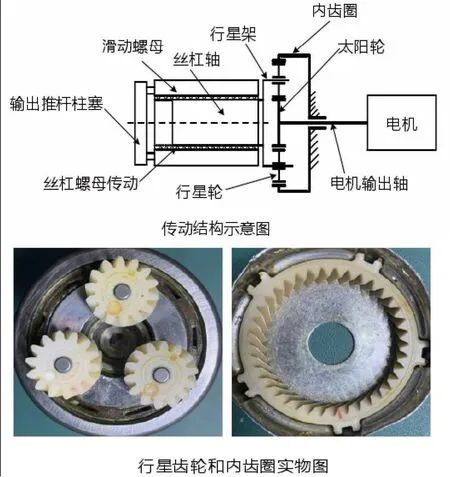
行星齿轮传动过程平稳、传动效率高,在保证较大传动比的同时,可以大大减小传动机构体积尤其是缩小机构的径向尺寸,确保了整体构型的紧凑性,便于实现制动系统的模块集成。图6中,电机输出轴上的小齿轮是太阳轮,同时也是行星齿轮机构中的主动件,行星架上有三个行星齿轮,外齿圈是固定不动的。当电机转动时,经过行星齿轮的减速增扭作用,行星架作为被动件输出旋转运动。行星架与丝杠轴连接,因此电机轴的旋转运动便转化为滑动螺母的直线运动,进而推动伺服缸活塞建压。该制动系统构型使用的是膜片弹簧式踏板感觉模拟器,相比于传统的圆柱螺旋弹簧式踏板感觉模拟器,膜片弹簧式能大大减少结构体积,便于将踏板感觉模拟器集成到液压调节单元中,缩小了整个电控制动系统的体积。同时,通过使用多片刚度不同的膜片弹簧,对标定参数进行更改,可以设计出踏板位移-减速度非线性曲线关系,从而得到和传统真空制动助力器类似的制动脚感。
因制动踏板解耦,无需过多考虑主缸制动液量对踏板位移的影响,集成式动力制动模块的主缸缸径可比传统制动主缸直径小,失效备份模式下,相同踏板力下系统产生压力较高。在制动系统匹配设计过程中,制动液体积(对应主缸行程和缸径)是一个需要着重注意的参数,设计时需要同时考虑如下因素:
(1)失效备份模式下需达到2.44m/s的制动减速度(涉及到踏板及基础制动系统匹配);
(2)车辆使用周期内的系统变化(如摩擦片磨损,系统刚度变化,摩擦系数变化等);
(3)传感器测量误差。
液压调节单元中,电磁阀组可以分为两类,一是负责液压回路通断的普通开关阀,如隔离阀1、2;二是负责压力精确控制的线性电磁阀,四组进、出液电磁阀均为线性电磁阀。隔离阀在工作时,只需要保持打开或者关闭的状态,因此使用普通开关阀即能满足要求。线性电磁阀的特点是能通过控制线圈电流值的不同保持电磁阀维持在不同的阀口开度,在需要进行压力精确控制的应用工况,如车辆横、纵向稳定性控制和自动泊车等具有重要的意义。
3.高度自动驾驶对制动系统的要求
由车辆自动驾驶程度等级划分可知,从辅助驾驶L1到完全自动驾驶L5,驾驶员一步一步地摆脱了责任。L2-L3的第一步是在特定的场景下(如泊车驾驶或公路驾驶),驾驶员可以将驾驶的完整操作移交给自动化系统,但驾驶员必须仍然坐在驾驶座上,如果制动系统发生故障,则需要驾驶员随时接管并在失效备份模式下将车停靠在安全地带。
这是根据现有的法律要求(例如ECE R13-H)设计的“故障安全”模式。这意味着,制动系统中的故障是可以允许的,因为驾驶员是制动系统失效备份设计的一部分,驾驶员在任何时候都有责任和能力控制制动踏板。人力推动制动主缸液压可以处理系统电气故障,而不会失去调制减速的能力。从L3到L4/L5,系统要从“故障安全”制动到“故障操作”的制动系统架构变化,驾驶员逐渐退出责任区域,且不必被要求坐在驾驶位。这样,即使在故障发生时,也必须由车辆控制系统将车辆带到到安全区域。对于制动系统来说,原来由驾驶员完成的操作,如何由车辆控制系统来完成,这就是对高级别自动驾驶对制动系统提出的新问题。
以驾驶员操作制动系统得到车辆“故障安全”纠错的模型,推演得出对自动驾驶制动系统备份的功能和性能要求为:
(1)提供足够制动力(制动减速度大于6.4m/s,覆盖99%的制动工况);
(2)达到6.4m/s减速的的时间不超过1.5s(考虑驾驶员反应时间和执行时间);
(3)防抱死性能(使车辆维持转向能力),ESP失效时,自动驾驶系统需与人力操作实现的防抱死水平相当对于纵向稳定性,目前状态下,ESP失效后,人力无法保证侧向稳定性,因此对自动驾驶系统也不做此要求。
通过对制动系统要求的分析,在高级别自动驾驶制动系统设计时,功能降级是最为棘手的问题,需要考虑制动冗余设计,即在主制动控制系统之外设置辅助制动系统。不仅如此,系统还需具备如系统状态检测,冗余控制,备份状态和车辆稳定性控制等拓展功能。
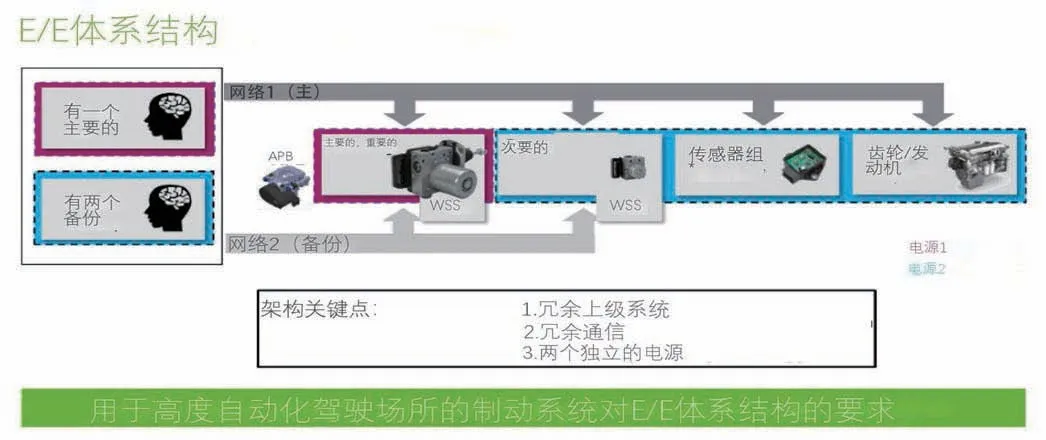
制动系统功能冗余是以电子架构为基础的。对于电子架构还必须防止可能影响主制动系统和辅助制动系统的共因故障。对此的解决方案是将功能和可用性的分离,如图26所示。
4.带有冗余制动单元的IPB概念
对于高度自动化的驾驶功能的实施,集成式动力制动模块(IPB)必须通过冗余制动单元(RBU)进行扩展,以保证车辆在所有单一故障条件下的主动减速、纵向稳定性和转向能力。
由于RBU仅在主制动模块(IPB)发生故障时才激活增压,因此RBU在车辆使用期间的激活频次非常低。因此,RBU与IPB的连接必须考虑表5中每项要求的重要性,使RBU对IPB功能和安全性的副作用应该最小化。

图27所示为IPB模块扩展冗余制动单元(RBU)的合适解决方案。其主要优点是:
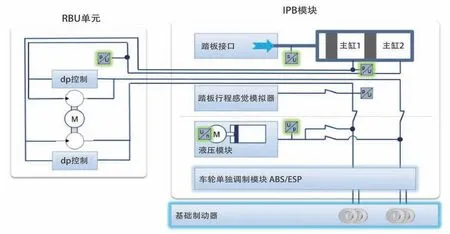
(1)IPB核心功能不受影响,对IPB软硬件的影响最小;
(2)从安全角度将IPB的副作用降至最低;
(3)能够在四个车轮上施加液压,以实现行车制动器性能;
(4)保证纵向车辆稳定性,预防车轮抱死和转向能力;
(5)随时通过踏板检测驾驶员接管;
(6)无需在IPB和RBU之间共享功能(网络复杂性低);
(7)防止混合平台(带和不带HAD)中自动驻车制动器(APB)的不同架构;
(8)适用于HAD和非HAD车辆的可扩展设计,工作量最小。
5.集成动力制动模块化与自动驾驶
乘用车的制动系统与安全相关,因此用于高度自动驾驶的制动单元扩展必须安全、可控和可靠。制动单元扩展必须独立于主制动单元,从而产生单独的液压单元,以满足故障操作特性。如果主制动单元发生故障,该辅助制动单元必须接管驾驶员的角色和任务,以制动车辆。如果人类驾驶员必须以机械备份方式操作车辆和制动系统,则辅助单元必须能够提供与驾驶员类似的功能范围。尽管主制动单元的可用性很高,但辅助制动单元应提供行车制动性能和车辆的纵向稳定。但是,根据驾驶员的能力,建议高度自动化的驾驶功能应调整其驾驶策略,以便在主制动单元发生故障时更具防御性和安全性。集成动力制动系统(IPB)的扩展产生了冗余制动单元(RBU),要连接IPB和RBU,需要额外的液压制动管。通常,RBU仅在非常罕见的IPB单元出现故障时才处于活动状态。因此,RBU不应该影响IPB的功能或安全性。上述带有冗余制动单元的IPB概念,RBU方法显示了对IPB的功能和安全性的最小副作用。在模块化套件的设计和差异中进一步考虑了将RBU与IPB连接的附加端口。
经常讨论将RBU进一步集成到IPB中。但是,IPB的所有组件都无法实现冗余的独立性(例如,齿轮或密封件导致IPB系统发生泄露),因此当集成到一个盒子中时,单个故障可能会影响冗余的路径,并最终导致高度自动化车辆的制动能力完全丧失。从今天的角度来看,这些组件的可靠性,无法以冗余方式实现。所以在进行潜在的下一步集成之前,有必要根据现场数据确定有关这些潜在常见原因故障组件可靠性的高质量数据,以确保符合高度自动驾驶功能的ASIL-D要求(ASIL表示汽车安全性等级。这是ISO26262标准针对道路车辆的功能安全性定义的风险分类系统,ASILD则代表最高程度的汽车危险)。
